



Gravity compensation of an intraocular surgery robot based on computed torque method
-
摘要:
为了提高一种具有远程运动中心(RCM)机构的眼内手术机器人的定位精度和稳定性,在建立机器人坐标系的基础上,通过动力学等效,对机器人各构件质心瞬态位置进行分析。根据拉格朗日方程建立机器人动力学模型。提出基于计算力矩法的重力补偿方法。在此基础上,通过MATLAB/Simulink软件对重力补偿模型进行仿真。比较独立比例微分(PD)控制方法及重力补偿方法的各关节运动响应曲线,表明重力补偿模型可有效补偿重力项;同时,分析重力补偿模型响应曲线与期望曲线的误差,证明重力补偿模型具有较高的补偿精度和可行性。
-
关键词:
- 远程运动中心(RCM)机构 /
- 眼内手术机器人 /
- 动力学 /
- 计算力矩法 /
- 重力补偿 /
- Simulink仿真
Abstract:To improve the positioning accuracy and stability of an intraocular surgery robot which has a remote center of motion (RCM) mechanism, the coordinate system of the robot is established. Based on the equivalent system model, the instantaneous centroid position of model components is analyzed. The dynamic model of the robot system is built by using the Lagrange equation. On the basis of the dynamic model, the gravity compensation model is built by using computed torque method and it is simulated by using MATLAB/Simulink. Each joint motion response curve is compared between the independent proportional plus derivative(PD) control model and the gravity compensation model. The results of simulation show that the gravity compensation model can compensate the gravity effectively. The difference between response curve and expected curve of gravity compensation model is analyzed, which prove that the gravity compensation model has high precision and feasibility.
-
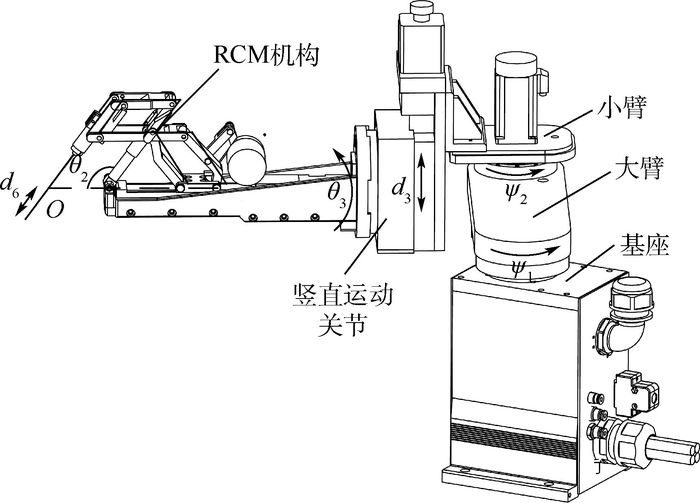
图 1 基于RCM机构的眼内手术机器人示意图
Figure 1. Schematic diagram of intraocular surgery robotbased on RCM mechanism

图 2 眼内手术机器人坐标系示意图
Figure 2. Schematic diagram of coordinate system ofintraocular surgery robot

图 4 等效后的RCM机构简图
si—各构件质心相对于转动关节的矢径的模;θi—关节变量;φi—与构件i质心矢径相对x′轴角度有关的参数。
Figure 4. Equivalent diagram of RCM mechanism
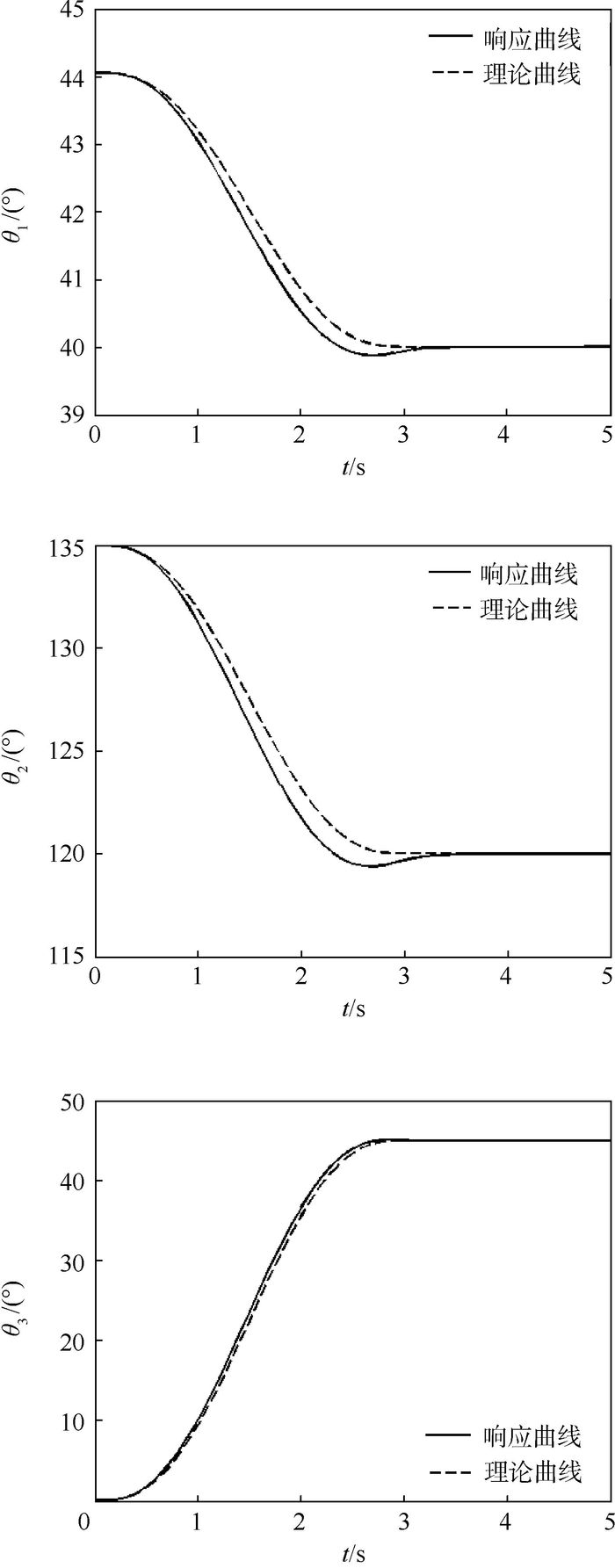
图 9 基于计算力矩法的重力补偿模型响应曲线
Figure 9. Response curves of gravity compensation model based on computed torque method

图 10 重力补偿模型期望曲线与响应曲线的差值
Figure 10. Difference between expected curves and response curves of gravity compensation model
表 1 机器人系统D-H参数
Table 1. D-H parameters of robot system
i 从zi-1到zi沿
xi-1距离ai-1从zi-1到zi绕
xi-1角度αi-1从xi-1到xi
沿zi距离di从xi-1到xi
绕zi角度θi1 0 0 d1 ψ1 2 a1 0 d2 ψ2 3 a2 0 d3 -90° 4 0 -90° L -90°+θ3 5 0 -90° 0 θ2 6 0 0 d6 0  下载: 导出CSV
下载: 导出CSV
表 2 各关节响应曲线的调节时间
Table 2. Adjusting time of response curve of each joint
误差带 关节变量 调节时间/s 计算力矩法 PD控制模型 ±2% θ1 1.9 2.0 θ2 1.9 2.1 θ3 2.4 2.6 ±5% θ1 1.4 1.7 θ2 1.5 1.6 θ3 2.3 2.4
下载: 导出CSV
-
[1] WEI W, GOLDMAN R, SIMAAN N, et al.Design and theoretical evaluation of micro-surgical manipulators for orbital manipulation and intraocular dexterity[C]//2007 IEEE International Conference on Robotics and Automation.Piscataway, NJ:IEEE Press, 2007:3389-3395. [2] 肖晶晶, 杨洋, 沈丽君, 等.视网膜血管搭桥手术机器人系统的研究[J].机器人, 2014, 36(3):293-299. http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201403006.htmXIAO J J, YANG Y, SHEN L J, et al.A robotic system for retinal vascular bypass surgery[J].Journal of Robotics, 2014, 36(3):293-299(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201403006.htm [3] BECKER B C.Vision-based control of a handheld micromanipulator for robot-assisted retinal surgery[D].Pittsburgh:Carnegie Mellon University, 2012. [4] 裴旭, 于靖军, 毕树生, 等.一维远程运动中心机构的型综合[J].机械工程学报, 2009, 45(2):144-148. http://www.cnki.com.cn/Article/CJFDTOTAL-JXXB200902027.htmPEI X, YU J J, BI S S, et al.Type synthesis for one-dimensional remote-center-of motion mechanisms[J].Journal of Mechanical Engineering, 2009, 45(2):144-148(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-JXXB200902027.htm [5] 黄龙, 杨洋, 苏鹏, 等.1R1T远程运动中心机构的型综合[J].机械工程学报, 2015, 51(13):131-136. http://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201513014.htmHUANG L, YANG Y, SU P, et al.Type synthesis of 1R1T remote center of motion mechanisms[J].Journal of Mechanical Engineering, 2015, 51(13):131-136(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201513014.htm [6] GIJBELS A, WOUTERS N, STALMANS P, et al.Design and realisation of a novel robotic manipulator for retinal surgery[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS), 2013.Piscataway, NJ:IEEE Press, 2013:3598-3603. [7] GIJBELS A, VANDER POORTEN E B, STALMANS P, et al.Design of a teleoperated robotic system for retinal surgery[C]//2014 IEEE International Conference on Robotics and Automation (ICRA).Piscataway, NJ:IEEE Press, 2014:2357-2363. [8] 肖晶晶, 杨洋, 李大寨, 等.眼科显微手术机器人研究进展及关键技术分析[J].机械工程学报, 2013, 49(1):15-22. http://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201301004.htmXIAO J J, YANG Y, LI D Z, et al.Advances and key techniques of ophthalmic microsurgical robots[J].Journal of Mechanical Engineering, 2013, 49(1):15-22(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201301004.htm [9] 蔡自兴.机器人学基础[M].北京:机械工业出版社, 2009:6.CAI Z X.Fundamentals of robotics[M].Beijing:China Machine Press, 2009:6(in Chinese). [10] LIU X, LI H, WANG J, et al.Dynamics analysis of flexible space robot with joint friction[J].Aerospace Science and Technology, 2015, 47:164-176. doi: 10.1016/j.ast.2015.09.030 [11] 刘善增, 余跃庆, 刘庆波, 等.3-R RC并联机器人动力学分析[J].机械工程学报, 2009, 45(5):220-224.LIU S Z, YU Y Q, LIU Q B, et al.Dynamic analysis of 3-R RC parallel manipulator[J].Journal of Mechanical Engineering, 2009, 45(5):220-224(in Chinese). [12] DE LUCA A, SICILIANO B, ZOLLO L.PD control with on-line gravity compensation for robots with elastic joints:Theory and experiments[J].Automatica, 2005, 41(10):1809-1819. doi: 10.1016/j.automatica.2005.05.009 [13] 龚捷, 鲍金锋, 衣冠超, 等.基于计算力矩法的装载机工作装置轨迹控制[J].机械工程学报, 2010, 46(13):141-146. http://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201013022.htmGONG J, BAO J F, YI G C, et al.Trajectory-following control for manipulator of wheel loaders based on computed torque[J].Journal of Mechanical Engineering, 2010, 46(13):141-146(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201013022.htm [14] 唐新星, 侯敬巍, 倪涛, 等.在线重力补偿下工程机器人自主作业轨迹跟踪性能分析[J].农业工程学报, 2013, 29(3):30-37. http://www.cnki.com.cn/Article/CJFDTOTAL-NYGU201303007.htmTANG X X, HOU J W, NI T, et al.Analysis on autonomous task trajectory tracking performance of construction robot with online gravity compensation[J].Transactions of the Chinese Society of Agricultural Engineering, 2013, 29(3):30-37(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-NYGU201303007.htm [15] CRAIG J J. Introduction to robotics:Mechanics and control[M].Upper Saddle River:Pearson Prentice Hall, 2005:62-100. [16] 宗光华, 裴旭, 于靖军, 等.双平行四杆型远程运动中心机构的设计[J].机械工程学报, 2007, 43(12):103-108. doi: 10.3321/j.issn:0577-6686.2007.12.020ZONG G H, PEI X, YU J J, et al.Design of double parallelogram remote-center-of-motion mechanisms[J].Chinese Journal of Mechanical Engineering, 2007, 43(12):103-108(in Chinese). doi: 10.3321/j.issn:0577-6686.2007.12.020 [17] 霍伟.机器人动力学与控制[M].北京:高等教育出版社, 2005:124-140.HUO W.Robot dynamics and control[M].Beijing:Higher Education Press, 2005:124-140(in Chinese). 期刊类型引用(6)
1. 任利娟,闫伟健,陈恪,李堃,于殿明,张广鹏. 机器人几何参数误差识别与补偿方法及实验. 制造技术与机床. 2024(07): 5-11 .  百度学术
百度学术2. 姜晓勇,金凡迪,朱炜辰,高鹏,杨克己. 微创手术机器人RCM研究进展. 制造业自动化. 2024(11): 23-29 . 百度学术3. Hu Shi,Jiajie Li,Lianjie Guo,Xuesong Mei. Control Performance Evaluation of Serial Urology Manipulator by Virtual Prototyping. Chinese Journal of Mechanical Engineering. 2021(01): 41-55 . 必应学术4. 杨斌. 仿人机器人关节驱动柔性特征自动检测系统. 现代电子技术. 2020(08): 176-178+182 . 百度学术5. 林前进,杨波,余跃,王成明,蔡彬. 基于变论域模糊控制算法的仿真与FPGA优化实现. 上海航天(中英文). 2020(06): 98-106 . 百度学术6. 程林云,张雷,宋晓娜. 基于RBF神经网络的机械臂自适应控制方法. 计算机测量与控制. 2019(07): 79-84 . 百度学术其他类型引用(9)
-

 下载:
下载:





 百度学术
百度学术
 点击查看大图
点击查看大图
计量
- 文章访问数: 753
- HTML全文浏览量: 107
- PDF下载量: 491
- 被引次数: 15
