



Effect of radar signal error on automatic carrier landing control of carrier-based aircraft
-
摘要:
基于常规舰载机使用的全自动着舰系统(ACLS),以及现役的作为主要导引方式的雷达导引着舰,分析了雷达导引过程中的信号误差对着舰的影响。从全自动着舰系统的组成和作用出发,建立完整的着舰仿真系统与环境,加入雷达信号测量数值、时间延迟和噪声杂波干扰3种不同类型的误差,以仿真误差存在时的着舰状况。通过计算着舰成功率,及其随误差量值的绝对值增大而减小的特点,验证了结果的正确性。该方法定量分析雷达信号误差的影响,既有助于着舰理论的研究,也对工程设计和应用具有指导意义。
Abstract:The effect of signal error on carrier landing during radar navigation was analyzed based on the automatic carrier landing system (ACLS) of natural carrier-based aircraft and the commissioned main guiding way of radar navigation in carrier landing. According to the components and the functions of the ACLS, the system and the environment of the whole carrier landing simulation were established, and three different kinds of radar error including testing value, delay time and noise were taken into simulation in order to simulate the landing conditions with error. The results were proved correct due to the calculation of carrier landing success rate which became lower as the absolute value of error increased. This method analyzes the effect degree of radar signal error quantitatively, which not only contributes to the study of carrier landing theory, but also possesses guiding significance for engineering design and application.
-

图 1 着舰成功率与测量误差曲线
Figure 1. Curves of carrier landing success rate versus measuring error

图 3 着舰成功率与杂波幅值曲线
Figure 3. Curves of carrier landing success rateversus noise amplitude
ms ACLS延迟主要组成部分 延迟时间 舰载雷达计算机α-β滤波器计算延迟 10 信号传送异步延迟 [0, 50] 接收机译码时间 1 任务计算机异步延迟 [0, 50] 任务计算机计算延迟 [12, 50] 飞控系统异步延迟 [0, 50] 飞控系统前台计算时间 [6.25, 56.25] 飞控系统计算延迟 6.25(多数指令)  下载: 导出CSV
下载: 导出CSV
表 2 存在测量误差时的着舰成功率
Table 2. Carrier landing success rate withmeasuring error
测量误差/m 着舰成功率 3级海况 4级海况 -2.5 0.000 0 0.000 0 -2.0 0.000 0 0.000 0 -1.5 0.000 0 0.000 0 -1.4 0.072 5 0.030 0 -1.2 0.177 5 0.077 5 -1.0 0.250 0 0.130 0 -0.9 0.305 0 0.237 5 -0.8 0.417 5 0.322 5 -0.7 0.502 5 0.430 0 -0.6 0.642 5 0.555 0 -0.5 0.792 5 0.655 0 0 0.937 5 0.772 5 0.5 0.822 5 0.717 5 0.6 0.677 5 0.652 5 0.7 0.605 0 0.525 0 0.8 0.445 0 0.402 5 0.9 0.395 0 0.347 5 1.0 0.337 5 0.257 5 1.2 0.250 0 0.185 0 1.4 0.145 0 0.075 0 1.5 0.112 5 0.032 5 2.0 0.000 0 0.000 0 2.5 0.000 0 0.000 0
下载: 导出CSV
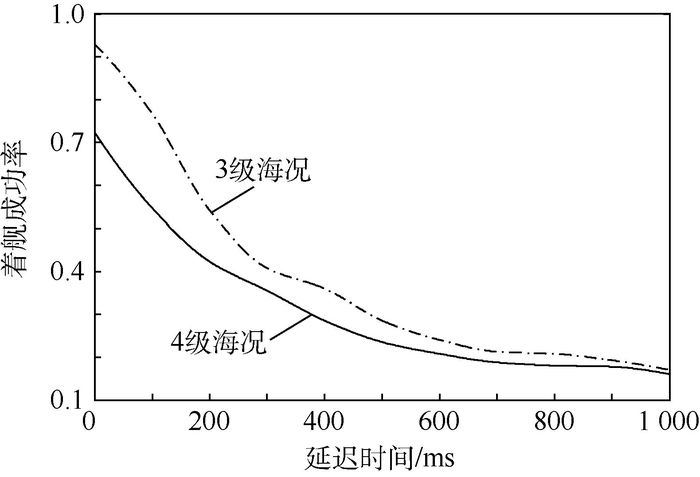
表 3 存在时间延迟误差时的着舰成功率
Table 3. Carrier landing success rate with time delay
延迟时间/ms 着舰成功率 3级海况 4级海况 0 0.937 5 0.725 0 100 0.767 5 0.547 5 200 0.542 5 0.422 5 300 0.407 5 0.355 0 400 0.360 0 0.285 0 500 0.285 0 0.235 0 600 0.240 0 0.207 5 700 0.212 5 0.187 5 800 0.207 5 0.180 0 900 0.192 5 0.177 5 1 000 0.170 0 0.160 0
下载: 导出CSV
表 4 存在噪声杂波误差时的着舰成功率
Table 4. Carrier landing success rate with noise error
噪声杂波幅值/m 着舰成功率 3级海况 4级海况 0 0.940 0 0.727 5 1 0.902 5 0.705 0 2 0.792 5 0.687 5 3 0.687 5 0.657 5 4 0.605 0 0.582 5 5 0.557 5 0.537 5 6 0.500 0 0.482 5 7 0.467 5 0.422 5 7.3 0.387 5 0.357 5 7.6 0.305 0 0.305 0 7.8 0.270 0 0.270 0 8 0.235 0 0.235 0 9 0.175 0 0.175 0 10 0.022 5 0.022 5
下载: 导出CSV
-
[1] 徐产兴.舰载机着舰引导雷达系统[J].现代舰船, 2003(4):34-35. http://www.cnki.com.cn/Article/CJFDTOTAL-XDJC200304016.htmXU C X.Director radar system of carrier-based aircraft landing[J].Modern Ships and Warships, 2003(4):34-35(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-XDJC200304016.htm [2] 戴征坚, 严科伟, 谭昕.国外航母雷达的现状与发展[J].舰船电子工程, 2016, 36(5):4-7. http://www.cnki.com.cn/Article/CJFDTOTAL-JCGC201605002.htmDAI Z J, YAN K W, TAN X.Development and status of foreign carrier radar[J].Ship Electronic Engineering, 2016, 36(5):4-7(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-JCGC201605002.htm [3] HUFF R W, KESSLER G K.Enhanced displays, flight controls and guidance systems for approach and landing:AD/A244 869[R].[S.l:s.n.], 1978. [4] 彭兢. 舰载飞机进舰着舰的自动引导和控制研究[D]. 北京: 北京航空航天大学, 2001: 45-69.PENG J.Research on the automatic guide and control of carrier-based airplane approach and landing[D].Beijing:Beihang University, 2001:45-69(in Chinese). [5] 郦能敬.对空情报雷达的测量精度分析[J].雷达科学与技术, 2005, 3(1):1-10. http://www.cnki.com.cn/Article/CJFDTOTAL-LDKJ200501000.htmLI N J.Measurement accuracy analysis of air defense intelligence radar[J].Radar Science and Technology, 2005, 3(1):1-10(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-LDKJ200501000.htm [6] 倪树新.航母载机着舰引导系统的体制研究[J].电光系统, 2000(2):8-19. http://www.cnki.com.cn/Article/CJFDTOTAL-ZSLL199502005.htmNI S X.Electronic and Research of pilot system of carrier-based aircraft landing[J].Electronic and Electro-optics System, 2000(2):8-19(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-ZSLL199502005.htm [7] URNES J M, HESS R K.Development of the F/A-18A automatic carrier landing system[J].Journal of Guidance, Control, and Dynamics, 1985, 8(3):289-295. doi: 10.2514/3.19978 [8] 杨一栋, 余俊雅.舰载飞机着舰引导与控制[M].北京:国防工业出版社, 2007:149-152.YANG Y D, YU J Y.Direction and control of carrier-based aircraft landing[M].Beijing:National Defence Industry Press, 2007:149-152(in Chinese). [9] MOOK D J, SWANSON D A, ROEMER M J, et al.Improved noise rejection in automatic carrier landing systems[J].Journal of Guidance, Control, and Dynamics, 1992, 15(2):509-519. doi: 10.2514/3.20864 [10] ANDERSON M R.Inner and outer loop manual control of carrier aircraft landing:AIAA-1996-3877[R].Reston:AIAA, 1996. [11] RICHARDS R, CHRENKA J, THORDSEN M.Artificial intelligence techniques for pilot approach decision aid logic (PADAL) system:N68335-98-C-0027[R].[S.l:s.n.], 1998. [12] 张永花. 舰载机着舰过程甲板运动建模及补偿技术研究[D]. 南京: 南京航空航天大学, 2012: 16-22.ZHANG Y H.Research of deck motion modeling and compensation technology during carrier-based aircraft landing[D].Nanjing:Nanjing University of Aeronautics and Astronautics, 2012:16-22(in Chinese). -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 698
- HTML全文浏览量: 83
- PDF下载量: 475
- 被引次数: 0
