



-
摘要:
针对无人机着舰过程中舰尾流扰动和甲板运动扰动对着舰点散布的影响,对复杂着舰环境下的无人机着舰纵向控制策略、控制结构和控制律参数设计方法进行研究。针对常规控制结构抗扰能力不足的问题,提出了无人机着舰纵向多操纵面平衡态直接力控制(DFC)策略及控制结构。提出了面向着舰点散布的控制律参数优化设计方法,该方法在保证系统满足稳定裕度指标的基础上,综合考虑了舰尾流扰动和甲板运动扰动对着舰点散布的影响,使2种扰动造成的着舰点散布最小。构建控制律参数优化设计问题,通过粒子群优化(PSO)算法进行优化设计,得到高抗扰性能的控制律参数。在控制律参数优化中考虑舰尾流和甲板运动的功率谱密度分布,使设计更具有针对性,减小了控制律设计的保守性,进一步提高控制的抗扰性能。算例设计及仿真验证了多操纵面平衡态DFC控制结构在抵抗舰尾流扰动和甲板运动扰动方面的优异性能,并证明了所提控制律参数设计方法的有效性。
-
关键词:
- 舰载无人机 /
- 着舰 /
- 直接力控制(DFC) /
- 控制律优化设计 /
- 功率谱密度 /
- 粒子群优化(PSO)
Abstract:Research on the control strategy, control structure and control law parameter design method is developed in this paper to realize flight control with high-precision performance in the longitude channel of UAV, aimed at solving the impact of sophisticated landing environment, including both the air-wake disturbance and the deck motion disturbance, on touchdown points. First, longitudinal control strategy and structure based on direct force control (DFC) and multi-surface for UAV's carrier landing are proposed on account of insufficient disturbance rejection ability of regular control structure. Second, an approach for designing control law parameters is presented. Control law parameters obtained by this approach which gives priority to the stability margin of the control system, make the position deviation from the ideal touchdown point to be the lowest under the sophisticated landing environment. A problem of optimum design based on this approach is constructed so that control law parameters with high-precision and high-immunity performance could be produced through particle swarm optimization (PSO) algorithm. The power spectrum densities of both the air-wake disturbance and the deck motion disturbance are analyzed to reduce the conservatism of the approach. Finally, the performance of the proposed longitudinal control strategy and structure is illustrated through being compared with the regular one. And the validity of the presented approach is also proved by calculation example and simulation.
-
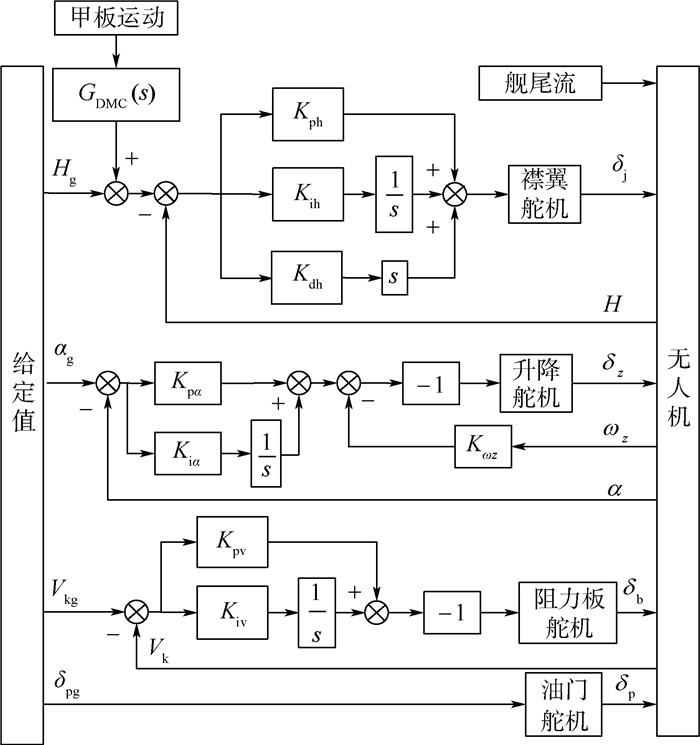
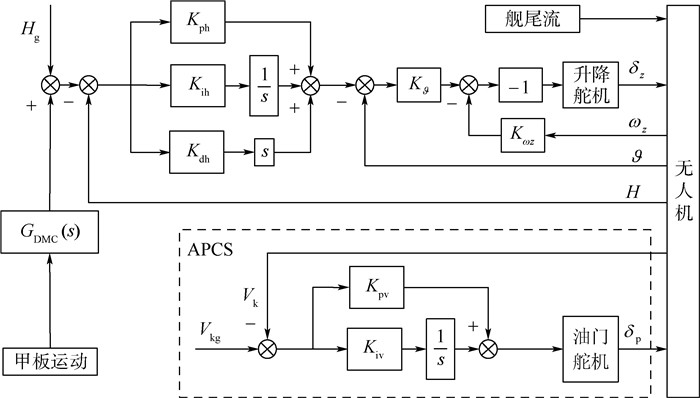
图 2 多操纵面平衡态DFC控制结构
Figure 2. Control structure based on multi-surface equilibrium-state DFC

图 4 舰尾流水平和垂直分量功率谱密度
Figure 4. Power spectrum density of air-wake horizontal and vertical component

图 6 理想着舰点高度信号及其功率谱密度
Figure 6. Altitude signal of ideal touchdown point and its power spectrum density
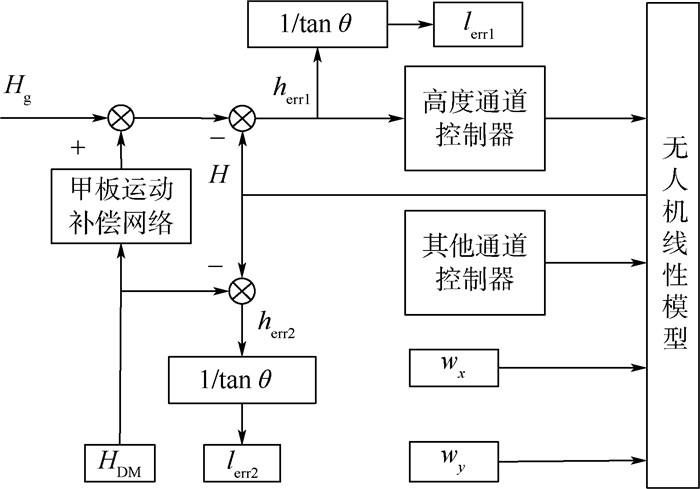
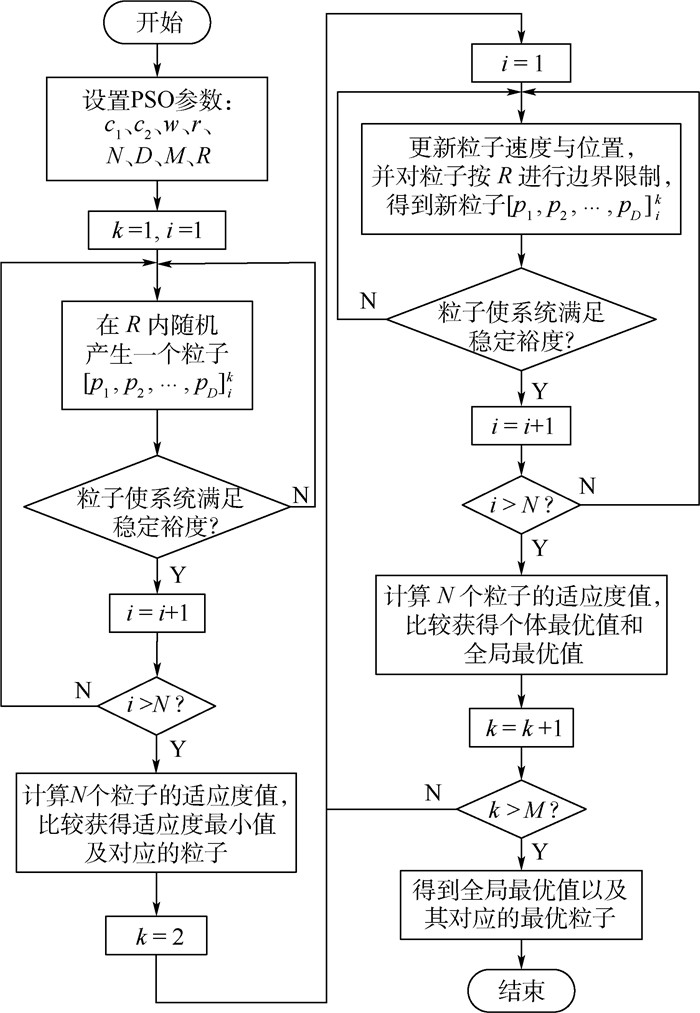
图 7 控制律优化设计结构示意图
Figure 7. Schematic diagram of control law optimization design structure
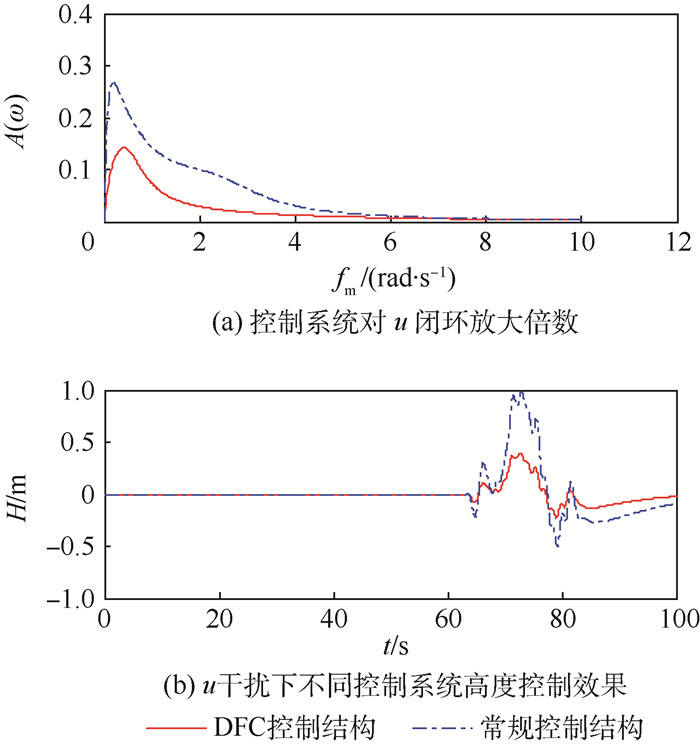
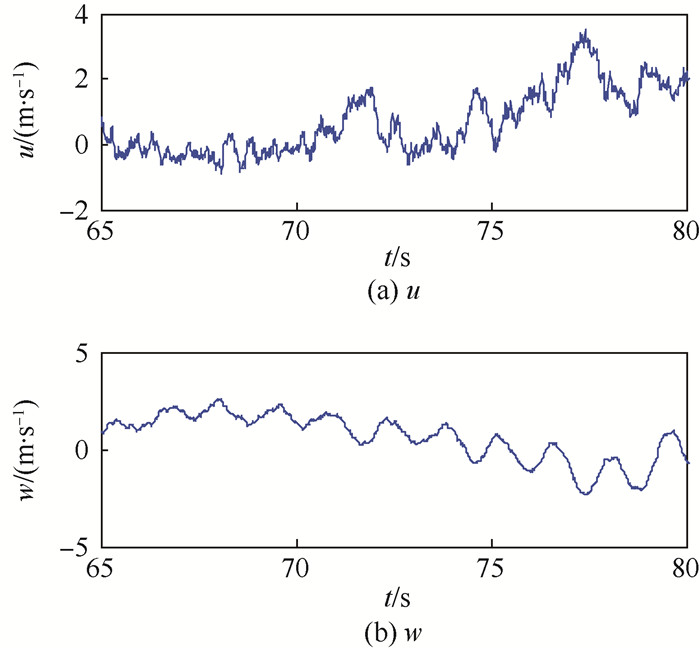
图 10 不同控制结构对u的抑制能力对比
Figure 10. Comparison of u inhibition ability between different control structures
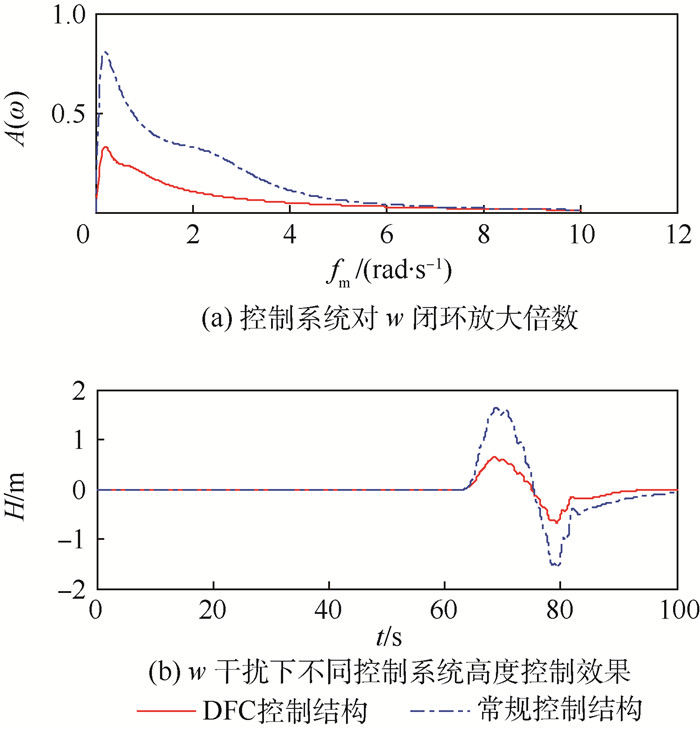
图 11 不同控制结构对w的抑制能力对比
Figure 11. Comparison of w inhibition ability between different control structures

图 12 不同控制结构的舰尾流扰动抑制能力对比
Figure 12. Comparison of inhibition ability of air-wake disturbance between different control structures

图 13 不同控制结构跟踪甲板运动能力对比
Figure 13. Comparison of ability to track deck motion between different control structures

图 14 不同控制结构着舰点纵向散布对比
Figure 14. Comparison of longitudinal distribution of touchdown points between different control structures
表 1 100次着舰仿真纵向散布统计结果
Table 1. Longitudinal deviation statistic results of 100 carrier landing simulations
控制结构类型 着舰偏差均值 着舰偏差均方根 理想着舰次数 允许着舰次数 着舰成功率/
%DFC -1.84 3.97 80 100 100 常规 10.04 10.53 30 57 57  下载: 导出CSV
下载: 导出CSV
-
[1] 王永庆, 罗云宝, 王奇涛, 等.面向机舰适配的舰载飞机起降特性分析[J].航空学报, 2016, 37(1):269-277. http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201601021.htmWANG Y Q, LUO Y B, WANG Q T, et al.Carrier suitability-oriented launch and recovery characteristics of piloted carrier-based aircraft[J].Acta Aeronautica et Astronautica Sinica, 2016, 37(1):269-277(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201601021.htm [2] 李晓磊, 赵廷弟.基于模糊推理的舰载机进舰过程安全性仿真分析[J].航空学报, 2013, 34(2):325-333. http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201302017.htmLI X L, ZHAO T D.Carrier-based aircraft landing process safety simulation analysis based on fuzzy inference[J].Acta Aeronautica et Astronautica Sinica, 2013, 34(2):325-333(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201302017.htm [3] STEINBERG M.Development and simulation of an F/A-18 fuzzy logic automatic carrier landing system[C]//Second IEEE International Conference on Fuzzy Systems, 1993.Piscataway, NJ:IEEE Press, 1993:797-802. [4] 张永花, 周鑫.纵向甲板运动补偿技术研究[J].电光与控制, 2012, 19(4):18-22. http://www.cnki.com.cn/Article/CJFDTOTAL-DGKQ201204007.htmZHANG Y H, ZHOU X.Study on the longitudinal deck motion compensation technique[J].Electronics Optics & Control, 2012, 19(4):18-22(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-DGKQ201204007.htm [5] 张永花, 周鑫.舰载机着舰点垂直运动补偿技术仿真研究[J].系统仿真学报, 2013, 25(4):826-830. http://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ201304045.htmZHANG Y H, ZHOU X.Simulation study on landing point vertical motion in carrier landing[J].Journal of System Simulation, 2013, 25(4):826-830(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ201304045.htm [6] 周鑫, 彭荣鲲, 袁锁中.舰载机理想着舰点垂直运动的预估与补偿[J].航空学报, 2013, 34(7):1663-1669. http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201307019.htmZHOU X, PENG R K, YUAN S Z.Prediction and compensation for vertical motion of ideal touchdown point in carrier landing[J].Acta Aeronautica et Astronautica Sinica, 2013, 34(7):1663-1669(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201307019.htm [7] 满翠芳, 江驹, 王新华, 等.舰载机动力补偿系统模糊逻辑设计技术[J].南京航空航天大学学报, 2010, 42(5):656-660. http://www.cnki.com.cn/Article/CJFDTOTAL-NJHK201005023.htmMAN C F, JIANG J, WANG X H, et al.Carrier-based aircraft approach power compensator system design based on fuzzy logic techniques[J].Journal of Nanjing University of Aeronautics & Astronautics, 2010, 42(5):656-660(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-NJHK201005023.htm [8] 董然. ACLS纵向内回路控制系统研究[D]. 哈尔滨: 哈尔滨工程大学, 2013: 56-61.DONG R.Research on the longitudinal inner loop configuration in ACLS[D].Harbin:Harbin Engineering University, 2013:56-61(in Chinese). [9] 张智, 李佳桐, 董然, 等.针对舰艉流抑制的ACLS纵向控制律优化设计[J].哈尔滨工程大学学报, 2016, 37(6):802-811. http://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201606009.htmZHANG Z, LI J T, DONG R, et al.Optimal design on longitudinal automatic carrier landing system for carrier air wake rejection[J].Journal of Harbin Engineering University, 2016, 37(6):802-811(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201606009.htm [10] DAVID J M, ROBERT J W. 军用规范——有人驾驶飞机的飞行品质(MIL-F-8785C)的背景资料和使用指南[M]. 李成忠, 肖亚伦, 方振平, 等译. 西安: 飞行力学, 1985: 149-153.DAVID J M, ROBERT J W.Backgroud information and user guide for MIL-F-8785C, military specification-flying qualities of poloted airplanes[M].LI C Z, XIAO Y L, FANG Z P, et al translated. Xi'an:Flight Dynamics, 1985:149-153(in Chinese). [11] 杨一栋.舰载飞机着舰导引与控制[M].北京:国防工业出版社, 2007:30-42.YANG Y D.Guidance and control of carrier aircraft landing[M]. Beijing:National Defend Industry Press, 2007:30-42(in Chinese). [12] 肖亚伦.飞行器运动方程[M].北京:航空工业出版社, 1987:99-103.XIAO Y L.Motion equations of aerial vehicles[M].Beijing:Aeronautics Industry Press, 1987:99-103(in Chinese). [13] 肖亚伦, 金长江.大气扰动中的飞行原理[M].北京:国防工业出版社, 1993:99-101.XIAO Y L, JIN C J.Flight principle in atmospheric turbulence[M].Beijing:National Defend Industry Press, 1993:99-101(in Chinese). [14] KENNEDY J.Particle swarm optimization[M]//SAMMUT C, WEBB G I.Encyclopedia of machine learning.New York:Springer, 2011:760-766. [15] SCHUTTE J F, GROENWOLD A A.A study of global optimization using particle swarms[J].Journal of Global Optimization, 2005, 31(1):93-108. doi: 10.1007/s10898-003-6454-x [16] LIAO W, WANG J, WANG J.Nonlinear inertia weight variation for dynamic adaptation in particle swarm optimization[C]//International Conference in Swarm Intelligence. Berlin:Springer, 2011:80-85. [17] ANDERSON M R.Inner and outer loop manual control of carrier aircraft landing[C]//AIAA Guidance, Navigation and Control Conference.Reston:AIAA, 1996:1-10. [18] 许东松, 刘星宇, 王立新.航母运动对舰载飞机着舰安全性的影响[J].北京航空航天大学学报, 2011, 37(3):289-294.XU D S, LIU X Y, WANG L X.Influence of carrier motion on landing safety for carrier-based airplanes[J].Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(3):289-294(in Chinese). -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 1001
- HTML全文浏览量: 117
- PDF下载量: 567
- 被引次数: 0
