



-
摘要:
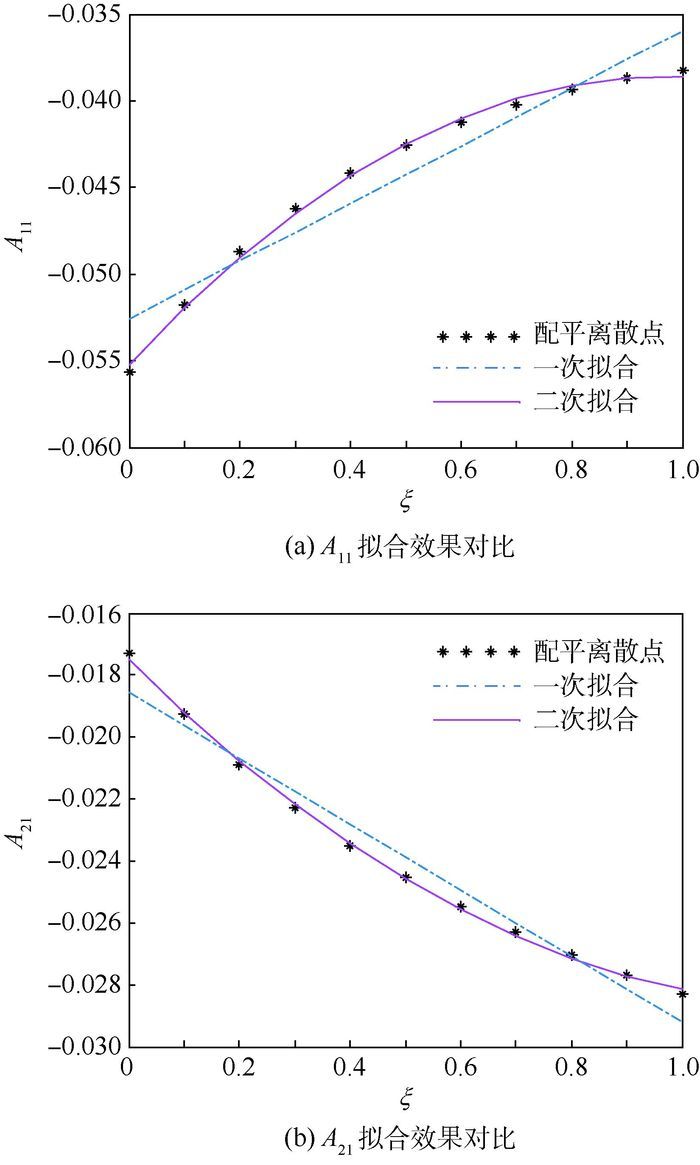
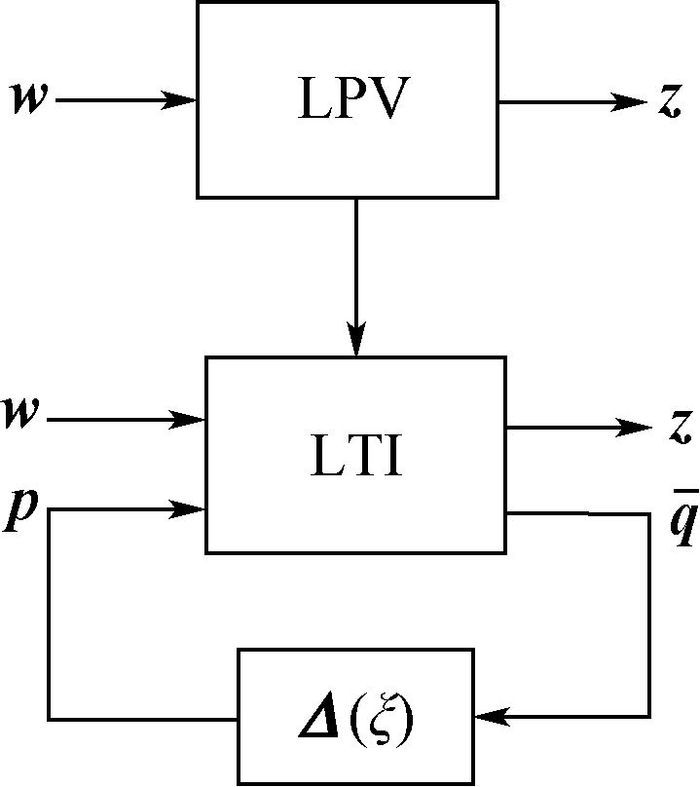
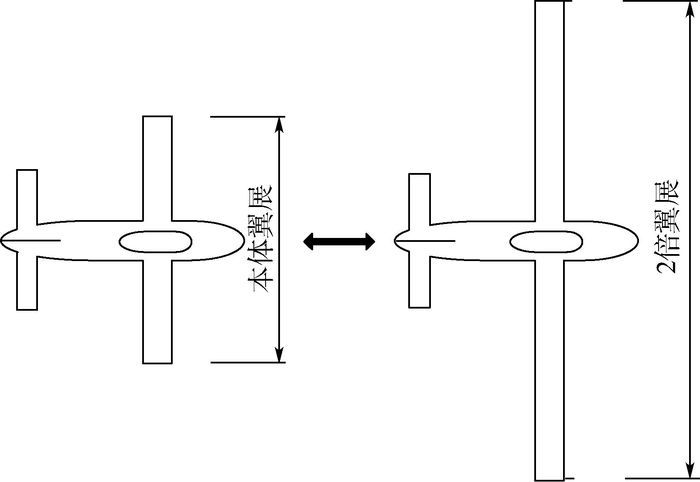
变体飞行器可以在不同的飞行环境及飞行任务下自适应地进行结构变形,从而确保飞行过程中具有最优的气动性能。以一类翼展可变的飞行器模型为对象,研究了一种针对非仿射参数依赖结构的线性变参数(LPV)系统的控制问题。在Jacobian线性化基础上,将变体过程中的非线性模型精确拟合为以翼展变形率为时变参数的LPV系统。与大多数LPV控制不同的是,此系统为多项式参数依赖结构,不具有仿射参数依赖形式。利用线性分式表示(LFR)将具有非仿射参数依赖结构的LPV模型转换为等价的线性时不变(LTI)系统。为保证变体过程的稳定,针对此LFR形式的变体模型,在满足二次Lyapunov稳定的线性矩阵不等式(LMI)条件基础上,设计了一类基于状态反馈的H∞控制器。仿真结果表明,上述控制器在外部存在干扰的情况下,能够保证变体过程的全局稳定性。因此基于LFR转换的控制器设计方法不再局限于仿射参数依赖形式,对于广泛LPV系统具有普遍适用性。
-
关键词:
- 变体飞行器 /
- 线性变参数(LPV) /
- 非仿射参数依赖 /
- 线性分式表示(LFR) /
- H∞控制
Abstract:Morphing aircraft can adaptively alter configuration according to the different flight conditions or a variety of missions to ensure the optimal aerodynamic performance in flight. A class of variable-span morphing aircraft were considered, and the controller design synthesis for linear parameter varying (LPV) systems with non-affine parameter dependent configuration was researched. Jacobian linearization approach, as well as exact fitting method, was used on multiple balance points to transform the nonlinear model of morphing process into the LPV structure which regards the ratio of variable-span as the varying parameter. In contrast to most LPV systems, the obtained structure was polynomial instead of affine parameter dependent. An equivalent linear time-invariant (LTI) system for the non-affine LPV structure can be obtained by linear fractional representation (LFR).On basis of the sufficient condition of linear matrix inequality(LMI) for quadratic Lyapunov stability, a design methodology of the state feedback
H ∞ controller was presented to guarantee the stability of morphing process. Its effectiveness for the globally stable performance was illustrated with simulation results, even when the external disturbance was taken into account. Therefore, the controller synthesis based on LFR transformation is no longer limited to the affine parameter dependent form, and can be widely applied to universal LPV system. -
[1] BONNEMA K L, STEPHEN B S.AFTI/F-111 mission adaptive wing flight research program[C]//4th Flight Test Conference, 2006:155-161. [2] PENDLETON E W, BESSETTE D, FIELD P B, et al.Active aeroelastic wing flight research program:Technical program and model analytical development[J].Journal of Aircraft, 2000, 37(4):554-561. doi: 10.2514/2.2654 [3] KUDVA J N.Overview of the DARPA smart wing project[J].Journal of Intelligent Material Systems & Structures, 2004, 15(4):261-267. doi: 10.1177/1045389x04042796 [4] 杨贯通, 唐胜景, 赵林东, 等.变后掠变展长飞行器动力学建模与动态响应分析[J].兵工学报, 2014, 35(1):102-107. http://www.cnki.com.cn/Article/CJFDTOTAL-BIGO201401015.htmYANG G T, TANG S J, ZHAO L D, et al.Dynamic modeling and response of a morphing UAV with variable sweep and variable span[J].Acta Armamentarii, 2014, 35(1):102-107(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-BIGO201401015.htm [5] 殷明, 陆宇平, 何真.变体飞行器LPV建模与鲁棒增益调度控制[J].南京航空航天大学学报, 2013, 45(2):202-208. http://www.cnki.com.cn/Article/CJFDTOTAL-NJHK201302009.htmYIN M, LU Y P, HE Z.LPV modeling and robust gain scheduling control of morphing aircraft[J].Journal of Nanjing University of Aeronautics and Astronautics, 2013, 45(2):202-208(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-NJHK201302009.htm [6] JIANG W L, DONG C Y, WANG Q.A systematic method of smooth switching LPV controllers design for a morphing aircraft[J]. Chinese Journal of Aeronautics, 2015, 28(6):1640-1649. doi: 10.1016/j.cja.2015.10.005 [7] 李玮, 王青, 董朝阳.一类非理想切换系统的H∞控制器设计[J].北京航空航天大学学报, 2014, 40(10):1405-1410. http://bhxb.buaa.edu.cn/CN/abstract/abstract13052.shtmlLI W, WANG Q, DONG C Y.H∞ controller design for a class of nonideal switched systems[J].Journal of Beijing University of Aeronautics and Astronautics, 2014, 40(10):1405-1410(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract13052.shtml [8] 江未来, 董朝阳, 王通, 等.变体飞行器连续平滑切换LPV控制[J].系统工程与电子技术, 2015, 37(6):1347-1353. doi: 10.3969/j.issn.1001-506X.2015.06.19JIANG W L, DONG C Y, WANG T, et al.Continuous smooth switching LPV control for morphing aircraft[J]. Systems Engineering & Electronics, 2015, 37(6):1347-1353(in Chinese). doi: 10.3969/j.issn.1001-506X.2015.06.19 [9] 王通, 王青, 江未来, 等.基于切换多胞模型的变体飞行器增益调参控制[J].北京航空航天大学学报, 2014, 40(1):75-79. http://bhxb.buaa.edu.cn/CN/abstract/abstract12826.shtmlWANG T, WANG Q, JIANG W L, et al.Gain schedule control of morphing vehicle based on switched polytopic system[J].Journal of Beijing University of Aeronautics and Astronautics, 2014, 40(1):75-79(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract12826.shtml [10] 何墉, 章卫国, 王敏文, 等.基于多目标控制的变体飞行器切换线性变参数控制器[J].控制理论与应用, 2015, 32(11):1518-1525. http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201511013.htmHE Y, ZHANG W G, WANG M W, et al.Switching linear-parameter-varying controller for morphing aircraft based on multi-objective[J].Control Theory & Applications, 2015, 32(11):1518-1525(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201511013.htm [11] YUE T, WANG L, AI J.Gain self-scheduled H∞ control for morphing aircraft in the wing transition process based on an LPV model[J].Chinese Journal of Aeronautics, 2013, 26(4):909-917. doi: 10.1016/j.cja.2013.06.004 [12] BALDELLI D H, LEE D H, PEÑA R S S, et al.Modeling and control of an aeroelastic morphing vehicle[J].Journal of Guidance, Control, and Dynamics, 2008, 31(6):1687-1699. doi: 10.2514/1.35445 [13] 王青, 王通, 后德龙, 等.基于速度线性化的变体飞行器鲁棒LPV控制[J].系统工程与电子技术, 2014, 36(6):1130-1136. doi: 10.3969/j.issn.1001-506X.2014.06.18WANG Q, WANG T, HOU D L, et al.Robust LPV control for morphing vehicles via velocity-based linearization[J]. Systems Engineering & Electronics, 2014, 36(6):1130-1136(in Chinese). doi: 10.3969/j.issn.1001-506X.2014.06.18 [14] HECKER S, VARGA A, MAGNI J F.Enhanced LFR-toolbox for MATLAB[J].Aerospace Science and Technology, 2005, 9(2):173-180. doi: 10.1016/j.ast.2004.12.001 [15] WANG F, BALAKRISHNAN V.Improved stability analysis and gain-scheduled controller synthesis for parameter-dependent systems[J].IEEE Transactions on Automatic Control, 2002, 47(5):720-734. doi: 10.1109/TAC.2002.1000267 [16] PREMPAIN E, POSTLETHWAITE I.Brief paper:L2 and H2 performance analysis and gain-scheduling synthesis for parameter-dependent systems[J].Automatica, 2008, 44(8):2081-2089. doi: 10.1016/j.automatica.2007.12.008 [17] YUE T, WANG L, AI J.Longitudinal linear parameter varying modeling and simulation of morphing aircraft[J].Journal of Aircraft, 2013, 50(6):1673-1681. doi: 10.2514/1.C031316 [18] 张杰, 吴森堂.一种变体飞行器的动力学建模与动态特性分析[J].北京航空航天大学学报, 2015, 41(1):58-64. http://bhxb.buaa.edu.cn/CN/abstract/abstract13125.shtmlZHANG J, WU S T.Dynamic modeling for a morphing aircraft and dynamic characteristics analysis[J]. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(1):58-64(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract13125.shtml [19] 殷明, 陆宇平, 何真, 等.变体飞行器变形辅助机动的建模与滑模控制[J].系统工程与电子技术, 2015, 37(1):128-134. http://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201501022.htmYIN M, LU Y P, HE Z, et al. Modeling and sliding mode control of morphing aircraft for morphing-aided maneuver[J].Systems Engineering & Electronics, 2015, 37(1):128-134(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201501022.htm [20] 贾英民.鲁棒H∞控制[M].北京:科学出版社, 2007.JIA Y M.Robust H∞ control[M].Beijing:Science Press, 2007(in Chinese). [21] APKARIAN P, GAHINET P.A convex characterization of gain-scheduled H∞ controllers[J].IEEE Transactions on Automatic Control, 1995, 40(5):853-864. doi: 10.1109/9.384219 -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 1042
- HTML全文浏览量: 117
- PDF下载量: 475
- 被引次数: 0
