



-
摘要:
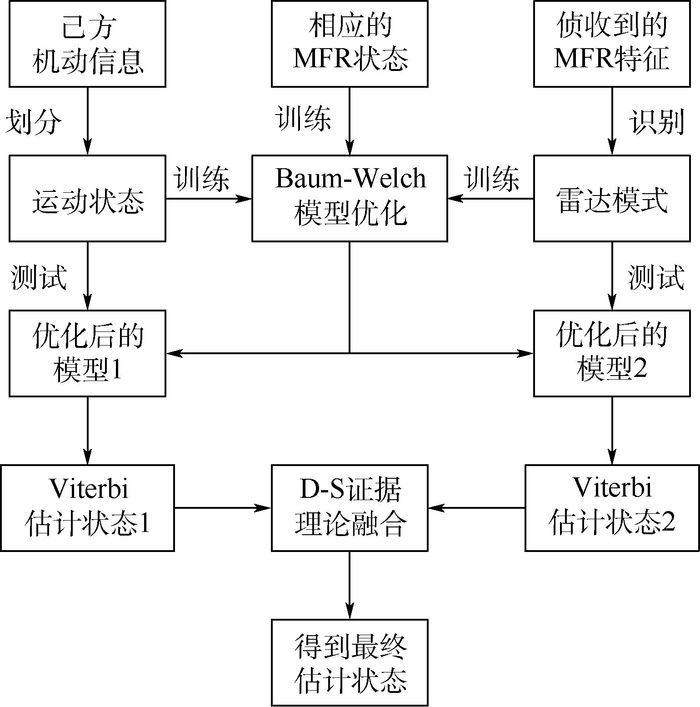
针对传统识别模型存在的参数规律描述不全面的问题,提出一种适用于多功能雷达(MFR)的层级模型,该模型通过任务、状态、参数3个层级反映了MFR系统的运行机制,并依据不同的参数变化规律,设定多种函数进行描述,能够反映信号的联合变化和统计信息,较统计和脉冲样本图模型具备更好的识别效果。在层级模型基础上,针对MFR状态转移估计方法存在的鲁棒性、估计准确率不佳的问题,引入目标运动状态信息,构建双链隐马尔可夫模型(HMM),进而利用D-S(Dempster-Shafer)证据理论优化估计结果,提出一种基于HMM的雷达状态转移估计方法,实验结果表明,提出的方法较改进前具备更优异的鲁棒性和估计准确率。
-
关键词:
- 多功能雷达(MFR) /
- 状态转移 /
- 隐马尔可夫 /
- 层级模型 /
- D-S证据理论
Abstract:Aimed at the problem of traditional recognition models that parameter rule description is not complete, a hierarchical model suitable for multi-function radar (MFR) is proposed in this paper. This model reflects the operating mechanism of MFR system through three levels of task, state and parameter. Then according to parameter features, a variety of functions are used to describe the change rule of parameters, and signal joint changes and statistical information can be reflected. This model has better recognition effect compared with statistic and pulse sample diagram model. On the basis of the hierarchical model, to solve the problem of poor robustness and low accuracy of MFR state transfer estimation method, double chain hidden Markov model (HMM) was built by introducing target motion state information. D-S (Dempster-Shafer) evidence theory was used to optimize estimated results, and a radar state transfer estimation method based on HMM was proposed. The experimental results show that the proposed algorithm has more excellent robustness and higher estimation accuracy rate than that before improvement.
-
Key words:
- multi-function radar (MFR) /
- state transition /
- hidden Markov /
- hierarchical model /
- D-S evidence theory
-
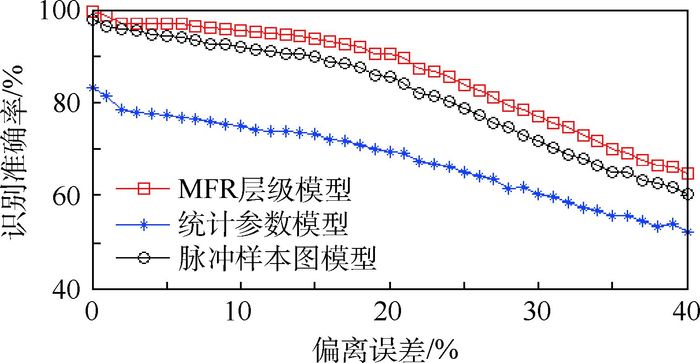
图 5 不同模型条件下KNN识别准确率随偏离误差的变化
Figure 5. Change of KNN recognition accuracy rate with EDL in different models
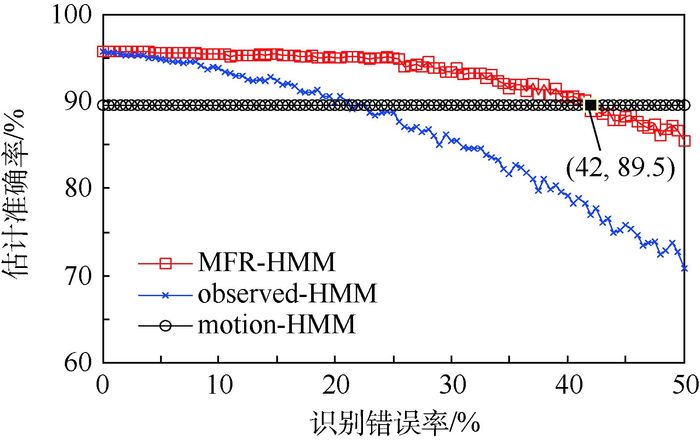
图 8 估计准确率随识别错误率的变化
Figure 8. Change of estimation accuracy rate with recognition error rate
表 1 描述区间s1、s2、s3的含义
Table 1. Meanings of description interval s1, s2, s3
参数 s1 s2 s3 d 近 中 远 v 高 中 低(包括逆向高速度) a 大 中 小(包括逆向大加速度)  下载: 导出CSV
下载: 导出CSV
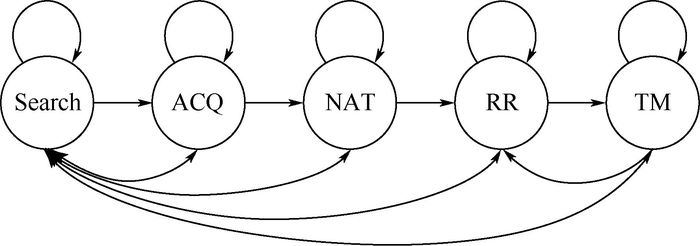
表 2 按照状态分类的Mercury MFR模式
Table 2. Mercury MFR modes classified via state
MFR状态 雷达模式 Search ω1ω2ω4ω5 ω2ω4ω5ω1 ω4ω5ω1ω2 ω5ω1ω2ω4 ω1ω3ω5ω1 ω3ω5ω1ω3 ω5ω1ω3ω5 ACQ ω1ω1ω1ω1 ω2ω2ω2ω2 ω3ω3ω3ω3 ω4ω4ω4ω4 ω5ω5ω5ω5 NAT/TM ω1ω6ω6ω6 ω2ω6ω6ω6 ω3ω6ω6ω6 ω4ω6ω6ω6 ω5ω6ω6ω6 RR ω7ω6ω6ω6 ω8ω6ω6ω6 ω9ω6ω6ω6 ACQ/NAT/TM ω6ω6ω6ω6 TM ω7ω7ω7ω7 ω8ω8ω8ω8 ω9ω9ω9ω9 ω1ω7ω7ω7 ω2ω7ω7ω7 ω3ω7ω7ω7 ω4ω7ω7ω7 ω5ω7ω7ω7 ω6ω7ω7ω7 ω1ω8ω8ω8 ω2ω8ω8ω8 ω3ω8ω8ω8 ω4ω8ω8ω8 ω5ω8ω8ω8 ω6ω8ω8ω8 ω1ω9ω9ω9 ω2ω9ω9ω9 ω3ω9ω9ω9 ω4ω9ω9ω9 ω5ω9ω9ω9 ω6ω9ω9ω9
下载: 导出CSV
表 3 按照MFR状态分类的目标运动状态
Table 3. Target motion modes classified via state of MFR
MFR状态 目标运动状态 Search/ACQ s3s2s2 s3s2s3 s3s3s2 s3s3s3 s3s1s1 s3s1s2 s3s1s3 s3s2s1 s3s3s1 Search/NAT/RR s2s2s2 s2s2s3 s2s3s2 s2s3s3 s2s3s1 Search/RR/TM s1s1s1 s1s1s2 s1s1s3 s1s2s1 s1s2s2 s1s2s3 s1s3s1 s1s3s2 s1s3s3 Search/NAT/RR s2s1s1 s2s1s2 s2s1s3 s2s2s1
下载: 导出CSV
表 4 雷达辐射源样本特征信息
Table 4. Sample feature information of radar emitters
雷达
模式PRI/μs RF/MHz PW/μs PA DOA/(°) 样本
个数类型 取值 类型 取值 类型 取值 1 参差 [1 850, 1 880, 1 940]
[1 060, 1 150, 1 100]
[1 200, 1 250, 1 310]组变 1 236/1 248/1 291 抖动 52.1±1.5 0.3~0.7 35~55 102 2 滑变 800/850/900/950/1 000 捷变 [3 850, 3 950] 固定 9.1 0.4~0.8 33~42 105 3 组变 1 125/1 276/1 342/1 497 组变 2 331/2 852/3 398/3 838 固定 15.9 0.5~0.9 16~30 104 4 固定 2 100 组变 2 300/2 400/2 500 多个 330.7/216.4/62.1 0.1~0.6 18~33 109 5 抖动 1 000±100 固定 2 925 抖动 50.6±1.5 0.2~0.7 33~58 100 6 调度 间隔544的脉冲5个
间隔690的脉冲7个
间隔依次为307, 343,
379, 398的脉冲4个
间隔为800±40的脉冲12个固定 5 460 多个 1.5/2.5/3.2/7.3 0.4~1.0 23~39 109 7 抖动 1 500±150 捷变 [3 751, 3 950] 抖动 15.6±1.5 0.3~0.6 23~38 103 8 抖动 2 300±230 捷变 [3 322, 3 508] 固定 105.6 0.1~0.5 31~38 101
下载: 导出CSV
表 5 识别准确率对比
Table 5. Comparison of recognition accuracy rate
偏离误差/
%识别准确率/% MFR层级模型 脉冲样本图模型 统计参数模型 0 99.64 97.87 83.17 8 96.18 92.59 75.95 16 93.19 88.69 72.19 24 85.57 80.26 66.22 32 74.60 68.96 58.53 40 64.71 60.39 52.05
下载: 导出CSV
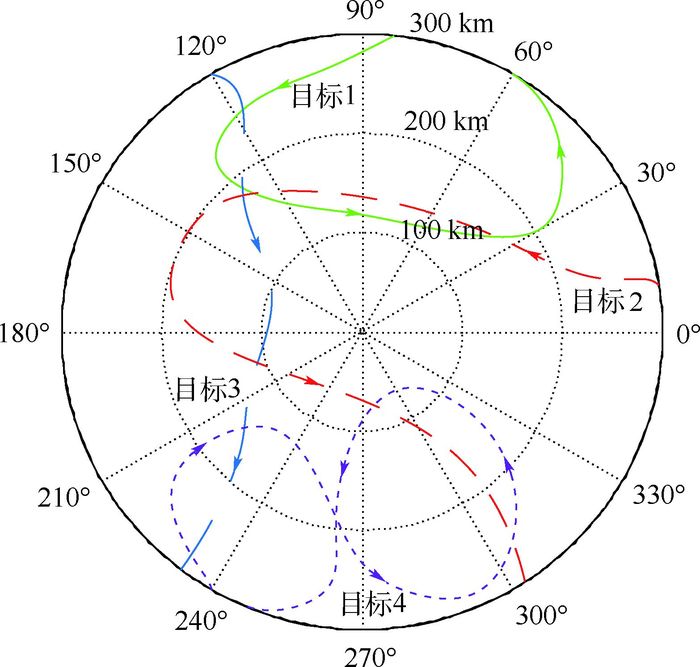
表 6 目标1机动参数对应的观测特征和MFR状态
Table 6. Observational characteristics and MFR state of target 1's maneuver parameter
序
号径向
距离/
km径向速度/
(km·h-1)径向
加速度/g观测特征 MFR
状态运动
状态雷达
模式1 300.00 1 012.36 0.11 s3s1s2 ω4ω5ω1ω2 Search 2 273.53 1 167.26 -0.12 s3s1s3 ω3ω3ω3ω3 ACQ 3 219.81 896.37 2.13 s2s1s1 ω4ω6ω6ω6 NAT 4 171.96 427.68 2.16 s2s2s1 ω8ω6ω6ω6 RR 5 116.57 92.04 0.68 s1s3s2 ω3ω8ω8ω8 TM 6 135.93 -132.07 -1.16 s1s3s3 ω5ω9ω9ω9 TM 7 221.16 -973.28 -1.02 s2s3s3 ω9ω6ω6ω6 RR 8 280.72 -767.91 0.03 s3s3s2 ω3ω5ω1ω3 Search 注:g=9.8 m/s2为重力加速度。
下载: 导出CSV
-
[1] 贲德.机载有源相控阵火控雷达的新进展及发展趋势[J].现代雷达, 2008, 30(1):1-4. http://www.cnki.com.cn/Article/CJFDTOTAL-XDLD200801002.htmBEN D.Latest status & development trends of airborne AESA fire-control radar[J].Modern Radar, 2008, 30(1):1-4(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-XDLD200801002.htm [2] VISNEVSKI N.Syntactic modeling of multi-function radars[D].Hamilton:McMaster University, 2005:47-58. [3] VISNEVSKI N, KRISHNAMURTHY V, WANG A, et al.Syntactic modeling and signal processing of multifunction radars:A stochastic context-free grammar approach[J].Proceedings of the IEEE, 2007, 95(5):1000-1025. doi: 10.1109/JPROC.2007.893252 [4] 刘海军. 雷达辐射源识别关键技术研究[D]. 长沙: 国防科学技术大学, 2010: 95-106.LIU H J.Researches on identification key technology for radar emitter[D].Changsha:National University of Defense Technology, 2010:95-106(in Chinese). [5] 刘海军, 樊昀, 李悦, 等.多功能雷达建模中的雷达字提取技术研究[J].国防科技大学学报, 2010, 32(2):91-96.LIU H J, FAN Y, LI Y, et al.Research on extracting of radar words in modeling of multi-function radar[J].Journal of National University of Defense Technology, 2010, 32(2):91-96(in Chinese). [6] ARASARATNAM I, HAYKIN S, KIRUBARAJAN T, et al.Tracking the mode of operation of multi-function radars[C]//IEEE Conference on Radar.Piscataway, NJ:IEEE Press, 2006:233-238. [7] 马爽. 多功能雷达电子情报信号处理关键技术研究[D]. 长沙: 国防科技大学, 2013: 101-125.MA S.Research on ELINT signal processing key technologies for multifunction radar research on extracting of radar words in modeling of multi-function radar[D].Changsha:National University of Defense Technology, 2013:101-125(in Chinese). [8] RYAN M S, NUDD G R.The Viterbi algorithm[J].Proceedings of the IEEE, 2015, 61(5):268-278. [9] ATTOUCH H, PEYPOUQUET J, REDONT P.A dynamical approach to an inertial forward-backward algorithm for convex minimization[J].SIAM Journal on Optimization, 2014, 24(1):232-256. doi: 10.1137/130910294 [10] WELCH L R.Hidden Markov models and the Baum-Welch algorithm[J].IEEE Information Theory Society Newsletter, 2003, 53(2):194-211. [11] 周德强, 陈卫东.基于Viterbi算法的扩频码与信息序列联合估计[J].飞行器测控学报, 2014, 33(5):441-447. http://www.cnki.com.cn/Article/CJFDTOTAL-FXCK201405014.htmZHOU D Q, CHEN W D.Joint blind estimation of spreading code and information sequence based on Viterbi algorithm[J].Journal of Spacecraft TT & C Technology, 2014, 33(5):441-447(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-FXCK201405014.htm [12] LIVANI H, JAFARZADEH S, EVRENOSOGLU C Y, et al.A unified approach for power system predictive operations using Viterbi algorithm[J].IEEE Transactions on Sustainable Energy, 2014, 5(3):757-766. doi: 10.1109/TSTE.2014.2301915 [13] 刘韬. 基于隐马尔可夫模型与信息融合的设备故障诊断与性能退化评估研究[D]. 上海: 上海交通大学, 2013: 46-52.LIU T.Study of hidden Markov model and information fusion in equipment fault diagnosis and performance degradation assessment[D].Shanghai:Shanghai Jiao Tong University, 2013:46-52(in Chinese). [14] 代鹂鹏, 王布宏, 蔡斌, 等.基于SCFG建模的多功能雷达状态估计算法[J].空军工程大学学报(自然科学版), 2014, 15(3):24-28. http://www.cnki.com.cn/Article/CJFDTOTAL-KJGC201403006.htmDAI L P, WANG B H, CAI B, et al.Latest status & development trends of airborne AESA fire-control radar[J].Journal of Air Force Engineering University(Natural Science Edition), 2014, 15(3):24-28(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-KJGC201403006.htm [15] 章登义, 欧阳黜霏, 吴文李.针对时间序列多步预测的聚类隐马尔科夫模型[J].电子学报, 2014, 42(12):2359-2364. doi: 10.3969/j.issn.0372-2112.2014.12.004ZHANG D Y, OUYANG C F, WU W L.Cluster-based hidden Markov model in time series multi-step prediction[J].Acta Electronica Sinica, 2014, 42(12):2359-2364(in Chinese). doi: 10.3969/j.issn.0372-2112.2014.12.004 [16] WANG A, KRISHNAMURTHY V.Signal interpretation of multifunction radars:Modeling and statistical signal processing with stochastic context free grammar[J].IEEE Transactions on Signal Processing, 2008, 56(3):1106-1119. doi: 10.1109/TSP.2007.908949 -

 下载:
下载:


 点击查看大图
点击查看大图

计量
- 文章访问数: 821
- HTML全文浏览量: 167
- PDF下载量: 391
- 被引次数: 0
