



Direct kinematics of a spatial parallel mechanism based on conformal geometric algebra
-
摘要:
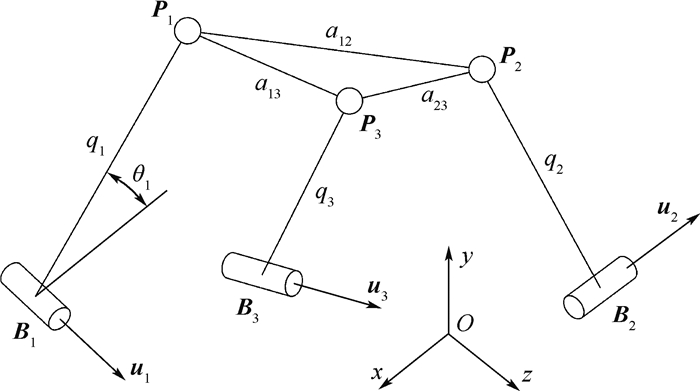
将共形几何代数(CGA)引入空间并联机构位置正解中,提出了一种空间3-RPS并联机构位置正解新算法。以任意一条支链轴线与静平台平面的夹角为待求变量,基于点的CGA表达方法建立了该支链与动平台连接的铰接点关于待求变量的数学表达式;通过2次构造2个空间球和1个平面的外积,分别获得动平台其余2个铰接点的点对;利用距离公式,只需简单的平方运算可直接推导出该问题关于待求变量的一元16次输入输出方程,进而获得了该机构的全部16组解析解,无增无漏。该方法没有繁琐的坐标变换和矩阵计算,以及复杂的多元高次非线性方程组消元求解。通过数字实例计算表明,求解过程较清晰地揭示出机构运动的几何特点,几何直观性好。
-
关键词:
- 共形几何代数(CGA) /
- 空间并联机构 /
- 位置正解 /
- 输入输出方程 /
- 解析解
Abstract:An algorithm is proposed for the direct kinematics analysis of a spatial general 3-RPS parallel mechanism based on conformal geometric algebra (CGA). The angle between the axis of an arbitrary kinematic chain and the plane of the fixed platform can be regarded as the unknown variable. The mathematical expression of the position of the spherical joint connecting the moving platform with the kinematic chain can be expressed in the unknown variable based on CGA. The outer product of two space balls and a flat surface are constructed two times, and the corresponding points of the remaining two vertices of the moving platform are obtained respectively. The 16th degree input-output polynomial equation in the unknown variable is straightforwardly obtained by distance formula and all 16 sets of closed-form solutions can be achieved. The algorithm avoids the use of rational angles or matrices, and complex computations for nonlinear and multivariable equations. A numerical example is given to demonstrate geometric characteristics of the motion and the algorithm is intuitive.
-
表 1 CGA中几何元素的表达式
Table 1. Expression of geometric elements in CGA
几何元素 表达式1 (IPNS) 表达式2 (OPNS) 点 P=X+X2e∞/2+e0 球 S=P-r2e∞/2 S*=X1∧X2∧X3∧X4 平面 π=n+te∞ π*=X1∧X2∧X3∧e∞ 圆 Z=S1∧S2 Z*=X1∧X2∧X3 直线 l=π1∧π2 l*=X1∧X2∧e∞ 点对 PP=S1∧S2∧S3 P*P=X1∧X2  下载: 导出CSV
下载: 导出CSV
表 2 位置正解6组实数解
Table 2. Six sets of real solutions for direct kinematics
组号 P1 P2 P3 1 (0, 4.115, -0.840) (-1.320, 3.795, 0.628) (0.650, 3.545, 0.386) 2 (0, 4.909, 1.051) (-1.491, 3.616, 0.727) (0.455, 3.710, 0.273) 3 (0, 3.688, -1.376) (1.456, 5.000, -0.975) (0.150, 3.929, 0.097) 4 (0, 4.833, 0.719) (1.234, 4.991, -0.847) (0.668, 3.529, 0.399) 5 (0, 3.566, -1.505) (1.240, 4.991, -0.850) (-0.548, 4.281, -0.306) 6 (0, 4.861, 0.830) (1.153, 4.984, -0.799) (-0.693, 4.331, -0.390)
下载: 导出CSV
-
[1] 黄真, 赵永生, 赵铁石, 等.高等空间机构学[M].北京:高等教育出版, 2006:141-166.HUANG Z, ZHAO Y S, ZHAO T S, et al.Advanced spatial mechanism[M].Beijing:Higher Education Press, 2006:141-166(in Chinese). [2] HUNT K H.Structural kinematics of in-parallel-actuated robot-arms[J].ASME Journal of Mechanisms Transmissions and Automation in Design, 1983, 105(4):705-712. doi: 10.1115/1.3258540 [3] LEE K M, SHAH D.Kinematic analysis of a three-degree-of-freedom in-parallel actuated manipulator[J].IEEE Journal of Robotics and Automation, 1988, 4(2):354-360. http://ieeexplore.ieee.org/document/796/ [4] NANUA P, WALDRON K J, MURTHY V.Direct kinematic solution of a Stewart platform[J].IEEE Journal of Robotics and Automation, 1990, 6(4):438-444. doi: 10.1109/70.59354 [5] FANG Y, HUANG Z.Kinematics of a three-degree-of-freedom in-parallel actuated manipulator mechanism[J].Mechanism and Machine Theory, 1997, 32(7):789-796. doi: 10.1016/S0094-114X(97)00008-6 [6] 李树军, 王阴, 王晓光.3-RPS并联机器人机构位置正解的杆长逼近法[J].东北大学学报, 2001, 22(3):285-287. doi: 10.3321/j.issn:1005-3026.2001.03.014LI S J, WANG Y, WANG X G.Forward position analysis of 3-RPS in-parallel manipulator using self-modified successive approximation method[J].Journal of Northeastern University, 2001, 22(3):285-287(in Chinese). doi: 10.3321/j.issn:1005-3026.2001.03.014 [7] 韩方元, 赵丁选, 李天宇.3-RPS并联机构正解快速数值算法[J].农业机械学报, 2011, 42(4):229-233. http://industry.wanfangdata.com.cn/dl/Detail/Periodical?id=Periodical_nyjxxb201104046HAN F Y, ZHAO D X, LI T Y.A fast forward algorithm for 3-RPS parallel mechanism[J].Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(4):229-233(in Chinese). http://industry.wanfangdata.com.cn/dl/Detail/Periodical?id=Periodical_nyjxxb201104046 [8] 王进戈, 范丽华, 徐礼钜.3-RPS并联平台机构的位置正解与奇异构形分析的数值-符号解[J].机械设计, 2005, 22(5):15-19. http://www.cqvip.com/QK/93364X/200505/15632355.htmlWANG J G, FAN L H, XU L J.Positional forward solution and numeric-symbolic solution of singular configuration analysis for 3-RPS parallel platform mechanism[J].Journal of Machine Design, 2005, 22(5):15-19(in Chinese). http://www.cqvip.com/QK/93364X/200505/15632355.html [9] SCHADLBAUER J, WALTER D R, HUSTY M L.The 3-RPS parallel manipulator from an algebraic viewpoint[J].Mechanism and Machine Theory, 2014, 75:161-176. doi: 10.1016/j.mechmachtheory.2013.12.007 [10] LI H, HESTENES D, ROCKWOOD A.Generalized homogeneous coordinates for computational geometry[M].Berlin:Springer, 2001:27-76. [11] LI H, HESTENES D, ROCKWOOD A.Spherical conformal geometry with geometric algebra[M].Berlin:Springer, 2001:61-76. [12] LEO D, DANIEL F, STEPHEN M.Geometric algebra for computer science, an object-oriented approach to geometry[M].Burlington:Morgan Kaufmann, 2007:15-30. [13] HESTENES D.New foundations for classical mechanics[M].Dordrecht:Kluwer Academic Publishers, 2002:53-96. [14] 倪振松, 廖启征, 魏世民, 等.空间一般6R机械手位置反解的新方法[J].北京邮电大学学报, 2009, 32(2):29-32. http://www.buptjournal.cn/CN/abstract/abstract506.shtmlNI Z S, LIAO Q Z, WEI S M, et al.New algorithm for inverse kinematics analysis of general 6R serial robot[J].Journal of Beijing University of Posts and Telecommunications, 2009, 32(2):29-32(in Chinese). http://www.buptjournal.cn/CN/abstract/abstract506.shtml [15] JAIME G, HPRACIO O, JOSE M R.Kinematics of 3-RPS parallel manipulators by means of screw theory[J].International Journal Advance Manufacture Technology, 2008, 36(5):598-605. doi: 10.1007/s00170-006-0851-5.pdf -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 700
- HTML全文浏览量: 134
- PDF下载量: 439
- 被引次数: 0
