



-
摘要:
针对目标跟踪问题,提出基于傅里叶域卷积表示的目标跟踪算法,将目标跟踪问题转化为卷积表示模型,通过求解最优滤波器,得到对目标函数的最佳表示,可以实现快速鲁棒的跟踪。多通道卷积表示模型在傅里叶域等价于求解线性方程的最佳近似解。首先,通过广义逆理论求得该方程的最优通解,给出一般滤波器的表示形式;然后,利用前一时刻的滤波器和当前特征模板生成当前滤波器,利用满秩算法快速求解广义逆;最后,在位移和尺度上更新、应用该滤波器。在目标跟踪基准(OTB)数据库中的大量实验表明,本文算法比当前部分较为先进的跟踪算法具有更好的表现,并提供了更加灵活多样的滤波器设计。
-
关键词:
- 目标跟踪 /
- 卷积表示 /
- Moore-Penrose广义逆 /
- 傅里叶变换 /
- 最佳逼近
Abstract:A novel object tracking algorithm based on convolution representation in Fourier domain is proposed for object tracking. Object tracking question can be treated as a convolution representation model. By finding the best filters, which reconstruct the target function with minimum loss, fast and robust object tracking can be realized. When the optimal multi-channel convolution representation model is mapped to the Fourier domain, it is equal to solving the least squares solution to linear equations. First, all solutions of the system of linear equations can be expressed through the theory of pseudo inverse, which provide a general format of convolution filters. Then, filters updated in the previous frame and feature templates extracted from current frame are used to generate current filters, and the pseudo inverse can be obtained fast through the full rank algorithm. Finally, tracking filters are updated and applied in both translation and scale. Experimental results on the object tracking benchmark (OTB) database show that our algorithm performs better than some state-of-the-art tracking methods in terms of accuracy and offers a general format to design filters.
-

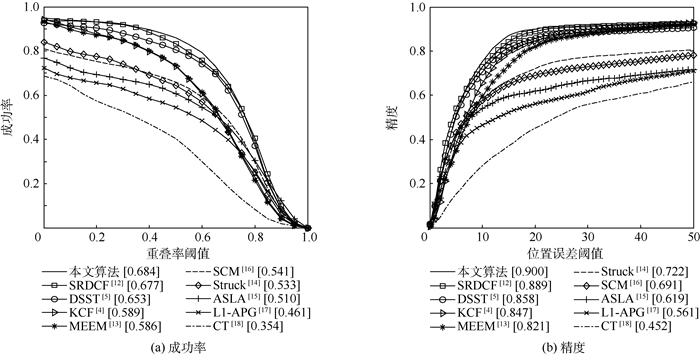
图 6 在32个图像序列上的成功率和精度曲线
Figure 6. Success rate and precision curves over 32 image sequences

图 7 本文算法与其他算法在Fleetface、Soccer、Walking2和Skating1序列上的跟踪结果
Figure 7. Tracking results of proposed algorithm and other algorithms on Fleetface, Soccer, Walking2 and Skating1 sequences

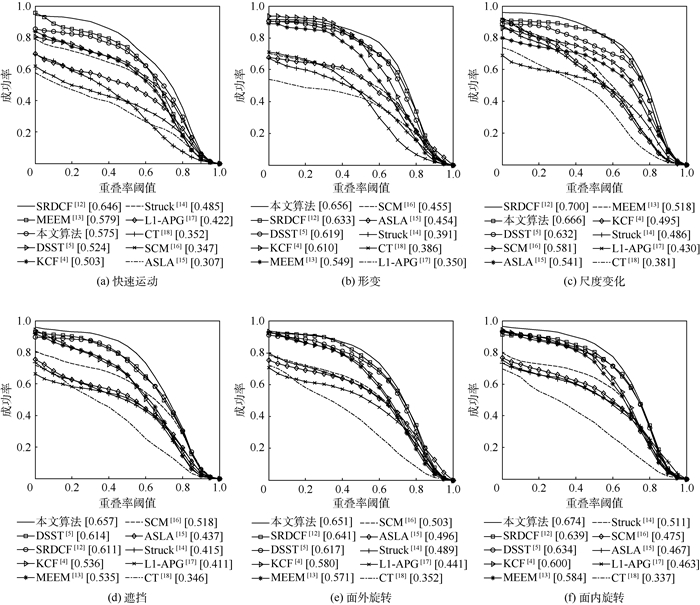
图 8 快速运动、形变、尺度变化、遮挡、面外旋转、面内旋转场景下的成功率曲线
Figure 8. Success rate curves of fast motion, deformation, scale variation, occlusion, out-of-plane rotation and in-plane rotation
-
[1] YILMAZ A, JAVED O, SHAH M.Object tracking:A survey[J].ACM Computing Surveys, 2006, 38(4):1-45. https://www.researchgate.net/.../284688924_Object_tracking_A_Survey [2] SMEULDERS A W M, CHU D M, CUCCHIARA R, et al.Visual tracking:An experimental survey[J].IEEE Transactions on Pattern Analysis and Machine Intelligence, 2014, 36(7):1442-1468. doi: 10.1109/TPAMI.2013.230 [3] BOLME D S, BEVERIDGE J R, DRAPER B A, et al.Visual object tracking using adaptive correlation filters[C]//2010 IEEE Conference on Computer Vision and Pattern Recognition.Piscataway, NJ:IEEE Press, 2010:2544-2550. [4] HENRIQUES J, CASEIRO R, MARTINS P, et al.High-speed tracking with kernelized correlation filters[J].IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(3):583-596. doi: 10.1109/TPAMI.2014.2345390 [5] DANELLJAN M, HAGER G, KHAN F S, et al.Accurate scale estimation for robust visual tracking[C]//Proceedings of the British Machine Vision Conference 2014.Durham:BMVA Press, 2014:1-11. [6] KIANI H, SIM T, LUCEY S.Multi-channel correlation filters[C]//2013 IEEE International Conference on Computer Vision.Piscataway, NJ:IEEE Press, 2013:3072-3079. [7] BODDETI N V, KANADE T, KUMAR B V K V.Correlation filters for object alignment[C]//2013 IEEE Conference on Computer Vision and Pattern Recognition.Piscataway, NJ:IEEE Press, 2013:2291-2298. [8] 张跃辉.矩阵理论与应用[M].北京:科学出版社, 2011:207-231.ZHANG Y H.Matrix theory and application[M].Beijing:Science Press, 2011:207-231(in Chinese). [9] PUNTANEN S, STYAN P H G, ISOTALO J.Matrix tricks for linear statistical models[M].Berlin:Springer-Verlag, 2011:349-350. [10] OPPENHEIM V A, WILLSKY S A.Signals and systems[M].Upper Saddle River:Prentice Hall, 1983:322. [11] DALAL N, TRIGGS B.Histograms of oriented gradients for human detection[C]//2005 IEEE Conference on Computer Vision and Pattern Recognition.Piscataway, NJ:IEEE Press, 2005:886-893. [12] DANELLJAN M, HAGER G, KHAN S F, et al.Learning spatially regularized correlation filters for visual tracking[C]//2015 IEEE International Conference on Computer Vision.Piscataway, NJ:IEEE Press, 2015:4310-4318. [13] ZHANG J M, MA S G, SCLAROFF S.MEEM:Robust tracking via multiple experts using entropy minimization[C]//2014 European Conference on Computer Vision.Berlin:Springer-Verlag, 2014:188-203. [14] HARE S, GOLODETZ S, SAFFARI A, et al.Struck:Structured output tracking with kernels[C]//2011 IEEE International Conference on Computer Vision.Piscataway, NJ:IEEE Press, 2011:263-270. [15] JIA X, LU H C, YANG M H.Visual tracking via adaptive structural local sparse appearance model[C]//2012 IEEE Conference on Computer Vision and Pattern Recognition.Piscataway, NJ:IEEE Press, 2012:1822-1829. [16] ZHONG W, LU H C, YANG M H.Robust object tracking via sparsity-based collaborative model[C]//2012 IEEE Conference on Computer Vision and Pattern Recognition.Piscataway, NJ:IEEE Press, 2012:1838-1845. [17] BAO C L, WU Y, LING H B, et al.Real time robust L1 tracker using accelerated proximal gradient approach[C]//2012 IEEE Conference on Computer Vision and Pattern Recognition.Piscataway, NJ:IEEE Press, 2012:1830-1837. [18] ZHANG K H, ZHANG L, YANG M H.Real-time compressive tracking[C]//2012 European Conference on Computer Vision.Berlin:Springer-Verlag, 2012:866-879. [19] WU Y, LIM J, YANG M H.Object tracking benchmark[J].IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(9):1834-1848. doi: 10.1109/TPAMI.2014.2388226 -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 691
- HTML全文浏览量: 129
- PDF下载量: 431
- 被引次数: 0
