



-
摘要:
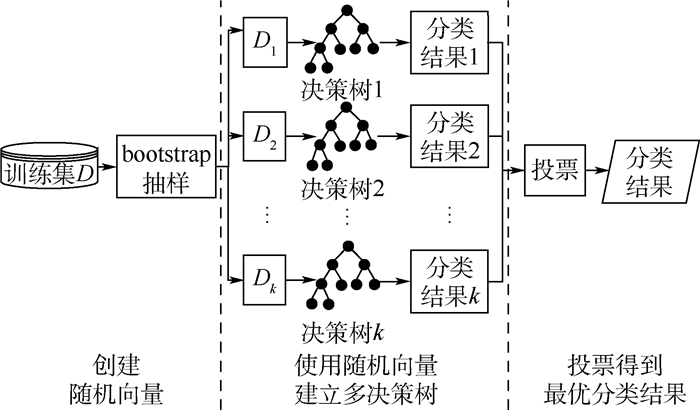
传统基于微机电惯性测量单元(MEMS-IMU)的惯性导航系统(INS)引入零速修正(ZUPT)算法校正器件的累积误差。但由于ZUPT算法零速判定阈值为固定值,只适合单一运动模式,当室内行人运动轨迹包含多种运动模式时,定位精度下降。对此,提出了一种多运动模式下自适应阈值ZUPT算法。分析了室内行人包括静止、走、跑、上楼和下楼5种运动模式零速判定阈值的选取,实现了利用随机森林(RF)算法对5种运动模式的分类识别,并根据识别结果对ZUPT算法零速判定阈值进行自适应调整。为了验证本文算法的可行性和有效性,利用MATLAB软件平台对实测数据进行处理,并与传统定位算法进行了比较。3组实验结果表明,当室内行人运动轨迹包括多种运动模式时,相比传统固定阈值的ZUPT算法,引入自适应调整阈值的ZUPT算法可使定位算法的定位精度提高73.83%。
-
关键词:
- 惯性导航系统(INS) /
- 零速修正(ZUPT) /
- 模式识别 /
- 阈值选取 /
- 自适应调整
Abstract:Zero-velocity update (ZUPT) algorithm is imported to calibrate device's cumulative error in traditional inertial navigation system (INS) which is based on micro-electro-mechanical system inertial mea-surement unit (MEMS-IMU). The positioning accuracy will be reduced when the movement trajectory of indoor pedestrian contains multi-movement patterns, because the zero-velocity determination threshold is fixed and only suitable for a single movement pattern. An adaptive threshold ZUPT algorithm under multi-movement patterns was proposed. The selection of zero-velocity determination threshold of indoor pedestrian's five movement patterns including Still, Walk, Run, Upstairs and Downstairs was analyzed. Classification and recognition of five movement patterns using random forest (RF) algorithm were realized. And the zero-velocity determination threshold of ZUPT was adaptively adjusted according to the recognition results. In order to verify the feasibility and validity of the algorithm, the test data was disposed and was compared with traditional position-ing algorithm through MATLAB software platform. The three groups of test results show that, when there are multiple movement patterns in an indoor pedestrian trajectory, the positioning accuracy of positioning algorithm can be improved by 73.83% when ZUPT algorithm with adaptively adjusted threshold is imported, compared with traditional positioning algorithm with fixed threshold.
-

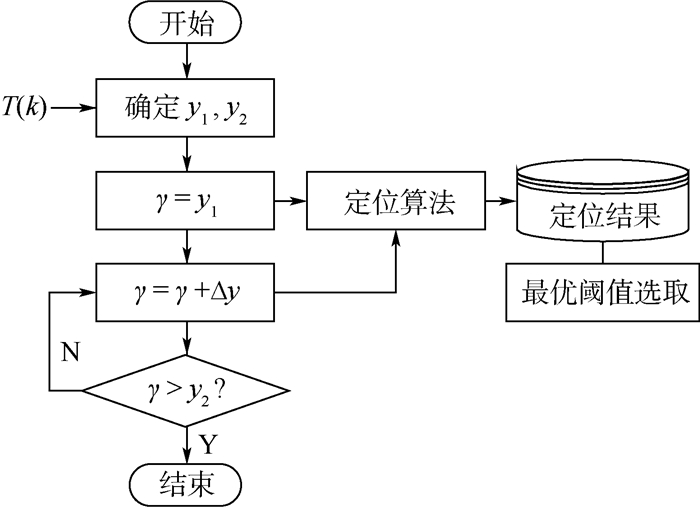
图 4 行人运动模式识别算法流程
Figure 4. Flowchart of pedestrian movement pattern recognition algorithm

图 9 自适应调整阈值与固定阈值变化比较
Figure 9. Variation comparison of adaptively adjusted threshold and fixed threshold
表 1 AHRS-1参数
Table 1. AHRS-1 parameters
传感器 参数 指标 加速度计 采样率/Hz 200 量程/g 6 零偏稳定性/μg 50 分辨率/mg 0.1 陀螺仪 采样率/Hz 200 量程/((°)·s-1) 500 零偏稳定性/((°)·h-1) 4 分辨率/((°)·s-1) 0.01  下载: 导出CSV
下载: 导出CSV
表 2 实验运动方式
Table 2. Movement patterns of experiments
实验 运动方式 实验1 常速跑步,采集2 min;运动轨迹闭合 实验2 依次常速走路, 常速跑步, 共采集5 min;运动轨迹闭合 实验3 依次常速走路, 常速上楼, 静止站立, 常速下楼, 常速跑步, 共采集12 min;运动轨迹闭合;采集3组
下载: 导出CSV
表 3 5种运动模式识别率比较
Table 3. Recognition rate comparison of five movement patterns
测试 10-折交叉 识别率/% Test1 171/171 100 Test2 178/179 99.44 Test3 169/169 100 Test4 181/181 100 Test5 164/164 100 Test6 200/200 100 Test7 204/204 100 Test8 182/182 100 Test9 188/188 100 Test10 177/177 100
下载: 导出CSV
表 4 5种运动模式阈值选取
Table 4. Threshold selection of five movement patterns
模式 阈值 静止 400 走 25 000 跑 40 000 上楼 4 000 下楼 5 000
下载: 导出CSV
表 5 定位精度比较
Table 5. Comparison of positioning accuracy
% 误差 实验1 实验2 实验3 1 2 3 平均 TTDE
(传统固定阈值)6.19 10.60 4.39 5.41 3.76 4.52 TTDE
(自适应调整阈值)1.62 4.43 3.15 3.68 2.74 3.19 精度提升 73.83 58.21 28.25 31.98 27.13 29.12
下载: 导出CSV
-
[1] BEKKELIEN A. Bluetooth indoor positioning[D]. Geneva: University of Geneva, 2012: 11-25. [2] YANG C, SHAO H R.WiFi-based indoor positioning[J].IEEE Communications Magazine, 2015, 53(3):150-157. doi: 10.1109/MCOM.2015.7060497 [3] 李尧, 汪明, 于晓谕.基于ZigBee室内定位算法[J].计算机系统应用, 2016, 25(6):180-184. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jsjxtyy201606031LI Y, WANG M, YU X Y.Indoor location algorithm based on ZigBee[J].Computer Systems & Applications, 2016, 25(6):180-184(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jsjxtyy201606031 [4] FISCHER C, SUKUMAR P T, HAZAS M.Tutorial:Implementing a pedestrian tracker using inertial sensors[J].IEEE Pervasive Computing, 2013, 12(2):17-27. doi: 10.1109/MPRV.2012.16 [5] MONTORSI F, PANCALDI F, VITETTA G M. Design and implementation of an inertial navigation system for pedestrians based on a low-cost MEMS IMU[C]//IEEE International Conference on Communications Workshops. Piscataway, NJ: IEEE Press, 2015: 57-61. [6] ZHENG X, YANG H, TANG W, et al. Indoor pedestrian navigation with shoe-mounted inertial sensors[M]//PARK J J, CHEN S C, GIL J M, et al. Multimedia and ubiquitous engineering. Berlin: Springer, 2014: 67-73. [7] JIMÉNEZ A R, SECO F, PRIETO J C, et al. Indoor pedestrian navigation using an INS/EKF framework for yaw drift reduction and a foot-mounted IMU[C]//20107th Workshop on Position-ing Navigation and Communication (WPNC). Piscataway, NJ: IEEE Press, 2010: 135-143. [8] 张华强, 赵剡, 陈雨.捷联惯性导航系统整体标定新方法[J].北京航空航天大学学报, 2012, 38(4):459-463. http://bhxb.buaa.edu.cn/CN/abstract/abstract12250.shtmlZHANG H Q, ZHAO Y, CHEN Y.New system calibration method for strapdown inertial navigation system[J].Journal of Beijing University of Aeronautics and Astronautics, 2012, 38(4):459-463(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract12250.shtml [9] ALTUN K, BARSHAN B.Pedestrian dead reckoning employing simultaneous activity recognitioncues[J].Measurement Science and Technology, 2012, 23(2):25103. doi: 10.1088/0957-0233/23/2/025103 [10] 唐文杰, 吕志伟, 张伦东, 等.基于零速修正辅助MIMU的行人导航算法研究[J].大地测量与地球动力学, 2016, 36(6):548-551. http://www.cqvip.com/QK/95685A/201606/669051906.htmlTANG W J, LÜ Z W, ZHANG L D, et al.Research of pedestrian navigation algoritm based on zero velocity update aided MIMU[J].Journal of Geodesy and Geodynamics, 2016, 36(6):548-551(in Chinese). http://www.cqvip.com/QK/95685A/201606/669051906.html [11] SKOG I, HÄNDEL P, NILSSON J O, et al.Zero-velocity detection-An algorithm evaluation[J].IEEE Transactions on Biomedical Engineering, 2010, 57(11):2657-2666. doi: 10.1109/TBME.2010.2060723 [12] 李辰祥. 基于MEMS行人惯性导航的零速度修正技术研究[D]. 厦门: 厦门大学, 2014. http://dspace.xmu.edu.cn/handle/2288/84427?locale-attribute=zhLI C X. Research on zero-velocity update technology of pedestrian inertial navigation based on MEMS[D]. Xiamen: Xiamen University, 2014(in Chinese). http://dspace.xmu.edu.cn/handle/2288/84427?locale-attribute=zh [13] 李佳璇. 双MIMU/磁力计单兵导航技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2015.LI J X. Research on dual MIMU/magnetometer technology of pedestrian navigation system[D]. Harbin: Harbin Engineering University, 2015(in Chinese). [14] WANG Z, ZHAO H, QIU S, et al.Stance-phase detection for ZUPT-aided foot-mounted pedestrian navigation system[J].IEEE/ASME Transactions on Mechatronics, 2015, 20(6):3170-3181. doi: 10.1109/TMECH.2015.2430357 [15] 路永乐, 张欣, 龚爽, 等.基于MEMS惯性传感器的人体多运动模式识别[J].中国惯性技术学报, 2016, 24(5):589-594. http://www.cnki.com.cn/Article/CJFDTotal-ZGXJ201605006.htmLU Y L, ZHANG X, GONG S, et al.Recognition of multiple human motion patterns based on MEMS inertial sensors[J].Journal of Chinese Inertial Technology, 2016, 24(5):589-594(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-ZGXJ201605006.htm [16] 薛洋. 基于单个加速度传感器的人体运动模式识别[D]. 广州: 华南理工大学, 2011.XUE Y. Human motion patterns recognition based on single triaxial accelerometer[D]. Guangzhou: South China University of Technology, 2011(in Chinese). [17] NILSSON J O, SKOG I, HÄNDEL P, et al. Foot-mounted INS for everybody-An open-source embedded implementation[C]//2012 IEEE/ION Position Location and Navigation Symposium (PLANS). Piscataway, NJ: IEEE Press, 2012: 140-145. [18] INCEL O D, KOSE M, ERSOY C.A review and taxonomy of activity recognition on mobile phones[J].Bionanoscience, 2013, 3(2):145-171. doi: 10.1007/s12668-013-0088-3 [19] 张健敏, 修春娣, 杨威, 等. 基于Android手机的用户行为模式识别算法[C]//全国信号和智能信息处理与应用学术会议, 2016: 463-468.ZHANG J M, XIU C D, YANG W, et al. User's behavior pattern recognition algorithm based on Android phones[C]//National Signal and Intelligent Information Processing and Application Academic Conference, 2016: 463-468(in Chinese). [20] 方匡南, 吴见彬, 朱建平, 等.随机森林方法研究综述[J].统计与信息论坛, 2011, 26(3):32-38. http://www.docin.com/p-266844023.htmlFANG K N, WU J B, ZHU J P, et al.A review of technologies on random forests[J].Statistics & Information Forum, 2011, 26(3):32-38(in Chinese). http://www.docin.com/p-266844023.html -

 下载:
下载:







 点击查看大图
点击查看大图

计量
- 文章访问数: 1444
- HTML全文浏览量: 188
- PDF下载量: 564
- 被引次数: 0
