



-
摘要:
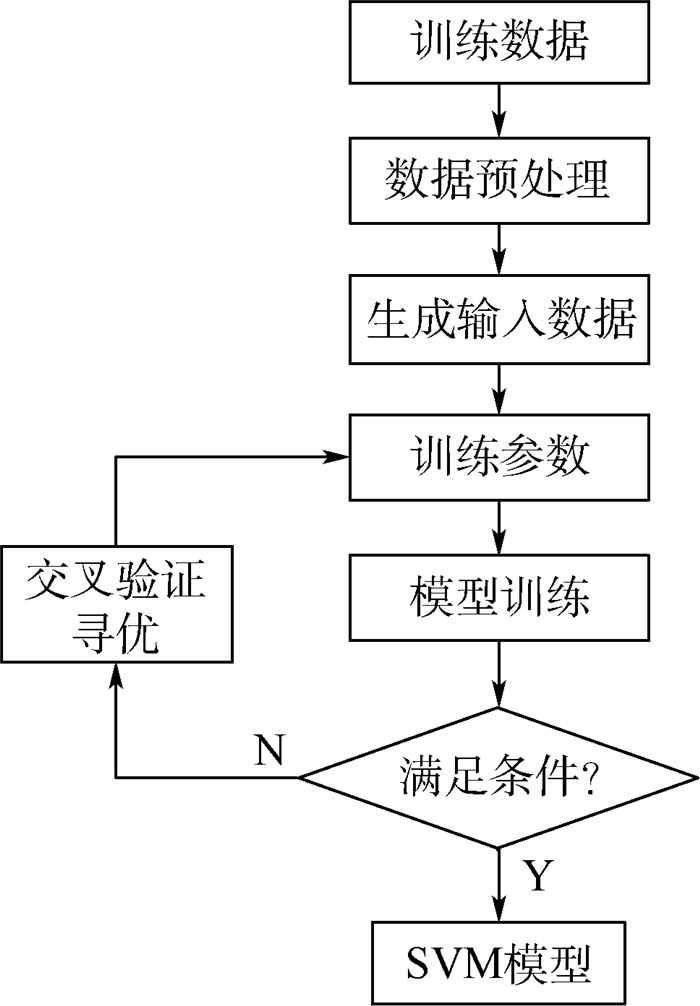
随着低空飞行密度不断增加,低空航行安全已引起广泛关注,由于低空环境复杂,低空飞行受地面障碍物和天气影响比商用航空显著,传统的空中交通警戒与防撞系统(TCAS)和其他冲突探测方法并不适用于低空密集飞行环境。针对传统探测方法计算量大、适用性差的不足,引入支持向量机(SVM)的二元分类方法,通过对本机和周边飞机航迹归一化处理,采用智能优化算法对关键参数进行优化,利用模拟数据对分类器进行预先训练,实现了适用于低空飞行的高效冲突探测。以大量的仿造数据对算法有效性进行了测试验证,结果表明漏警率和误警率分别控制在约0.1%和6%,克服了传统确定型方法与概率型方法难以兼顾效率与适用性的缺陷。
-
关键词:
- 通用航空 /
- 冲突探测 /
- 支持向量机(SVM) /
- GA-PSO /
- 智能优化算法
Abstract:With the continuous increasing of flight density, the aviation safety in low altitude has caused extensive concern. Low-altitude environment is complex, and ground obstacles and weather have more significant impact on low-altitude flight than commercial aviation. Traditional traffic alert and collision avoidance system (TCAS) and other methods may not be applicable to low-altitude intensive flight environment. In view of the computational complexity and lack of applicability of traditional detection methods, a binary classification method of support vector machine (SVM) was introduced. By normalizing the trajectories of own and surrounding aircraft, optimizing the key parameters by intelligent optimization algorithm, and pre-training the classifier through simulation data, efficient conflict detection for low-altitude flight was carried out. Various sets of artificial data were utilized to verify the effectiveness of the algorithm. The results show that the missed alarm rate and false alarm rate are controlled at about 0.1% and 6% respectively, which proves that the proposed algorithm can overcome the shortcomings of traditional deterministic and probabilistic methods which are difficult to take both the efficiency and applicability into account.
-
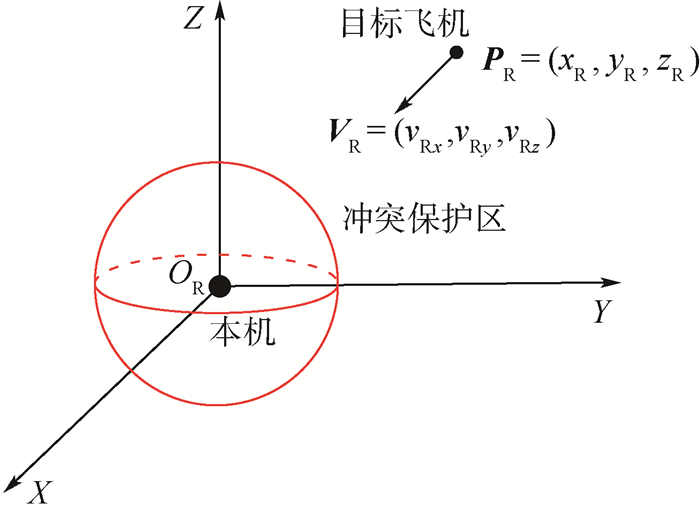
表 1 无冲突判定准则
Table 1. No conflict judgment criteria
卦限编号 卦限区间 无冲突判定准则 1 xR>0, yR>0, zR>0 
2 xR<0, yR>0, zR>0 
3 xR<0, yR<0, zR>0 
4 xR>0, yR<0, zR>0 
5 xR>0, yR>0, zR<0 
6 xR<0, yR>0, zR<0 
7 xR<0, yR<0, zR<0 
8 xR>0, yR<0, zR<0 
 下载: 导出CSV
下载: 导出CSV
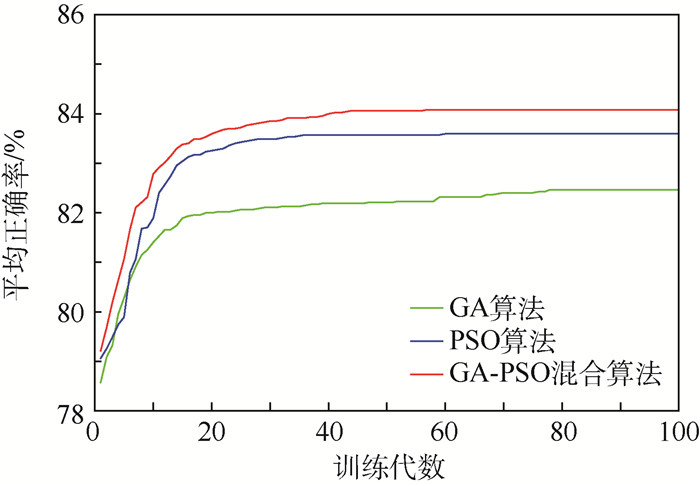
表 2 3种算法参数
Table 2. Parameters of three algorithms
参数 GA算法 PSO算法 GA-PSO混合算法 训练代数 100 100 100 种群大小 30 30 30 c1 N/A 1.5 1.5 c2 N/A 1.7 1.7 代沟 0.9 N/A 0.5 交叉概率 0.7 N/A 0.7 变异概率 0.02 N/A 0.02 注:N/A表示不适用。
下载: 导出CSV
表 3 归一化飞行状态
Table 3. Normalized flight status
飞机序号 相对经度xRi 相对纬度yRi 相对高度zRi 相对速度‖VRi‖ 相对航向角θRi 1 0.34 0 0.212 -1 0.2 2 0.78 -0.5 -0.261 0.2 0.5 3 -0.88 1 0.921 0 0.1 N -0.44 0.34 0 -0.3 0.8 注:xRi、yRi、zRi、‖VRi‖的区间为[-1, 1];θRi区间为[0, 1]。
下载: 导出CSV
表 4 SVM模型的平均正确率
Table 4. Average accuracy of SVM models
% 训练集(冲突-非冲突) GA算法 PSO算法 GA-PSO混合算法 100-100 82.016 9 81.903 82.789 150-150 87.649 8 87.603 4 89.029 200-200 82.713 1 83.641 4 84.244 300-300 85.779 7 87.139 8 87.411
下载: 导出CSV
表 5 CESSNA 172的尺寸和性能
Table 5. Dimensions and performance of CESSNA 172
尺寸 数值 主要性能 数值 长/ft 27.2 最大巡航速度/(km·h-1) 230 高/ft 8.9 最大航程/nmi 640(1 185 km) 翼展/ft 36.1 最大爬升率/(ft·mim-1) 730(223 m/min) 极限速度/(km·h-1) 302 失速速度/(km·h-1) 89 注:最大承载人数为4。
下载: 导出CSV
表 6 用于检测的统计数据
Table 6. Statistical data for detection
检测总次数 冲突航迹检测次数 不冲突航迹检测次数 104 069 51 680 52 439
下载: 导出CSV
表 7 检测系统性能的统计数据
Table 7. Statistical data for performance of detection system
性能 初始检测状态 10 s内检测 不经过移动加权平均 经过移动加权平均 漏警数 10 57 52 误警数 363 3 280 3 277 漏警率/% N/A 0.110 3 0.100 6 误警率/% N/A 6.254 9 6.249 2
下载: 导出CSV
-
[1] GARIEL M, HANSMAN R, FRAZZOLI E. Impact of GPS and ADS-B reported accuracy on conflict detection performance in dense traffic: AIAA-2011-6893[R]. Reston: AIAA, 2011. [2] FULTON N L.Airspace design:Towards a rigorous specification of complexity based on computational geometry[J].Aeronautical Journal, 1999, 103(1020):75-84. doi: 10.1017/S0001924000027779 [3] CHIANG, YI J, KLOSOWSKI J, et al. Geometric algorithms for conflict detection and resolution in air traffic management[C]//36th IEEE Conference on Decision and Control. Piscataway, NJ: IEEE Press, 1997, 2(2): 1835-1840. [4] MCDONALD J, VIVONA R. Strategic airborne conflict detection of air traffic and area hazards: NAS2-98005[R]. Washington, D. C. : NASA, 2000. [5] PRANDINI M, HU J, SASTRY S.A probabilistic approach to aircraft conflict detection[J].IEEE Transactions on Intelligent Transportation Systems, 2000, 1(4):199-220. doi: 10.1109/6979.898224 [6] JARDIN M R. Grid-based strategic air traffic conflict detection: AIAA-2005-5826[R]. Reston: AIAA, 2005. [7] HU J. Aircraft conflict detection in presence of spatially correlated wind perturbations: AIAA-2003-5339[R]. Reston: AIAA, 2003. [8] 李彬, 吴珍珍.基于航迹预测的飞行冲突预测[J].微处理机, 2011(2):73-80.LI B, WU Z Z.Flight conflict detection based on flight path prediction[J].Microprocessors, 2011(2):73-80(in Chinese). [9] 韩艳茹, 敬忠良, 龚嘉琦.空中交通预警与防撞系统(TCAS)风险及对策研究[J].计算机测量与控制, 2012, 20(3):737-740.HAN Y R, JING Z L, GONG J Q.Research of traffic alert and collision avoidance system(TCAS) risk and countermeasure[J].Computer Measurement & Control, 2012, 20(3):737-740(in Chinese). [10] WILLIAMSON T, SPENCER N A.Development and operation of the traffic alert and collision avoidance system(TCAS)[J].Proceedings of the IEEE, 1989, 77(11):1735-1744. doi: 10.1109/5.47735 [11] 林熙. 密集飞行条件下的间隔自主保持方法研究[D]. 北京: 北京航空航天大学, 2011: 11-13.LIN X. Research on self-separation assurance methods in condition of intensive flight[D]. Beijing: Beihang University, 2011: 11-13(in Chinese). [12] LIN C E.Collision avoidance solution for low-altitude flights[J].Proceedings of the Institution of Mechanical Engineers, Part G:Journal of Aerospace Engineering, 2011, 225(7):779-790. doi: 10.1177/0954410011399211 [13] JIAO Y L, ZHANG X J, GUAN X M.An algorithm for airborne conflict detection based on support vector machine[J].Applied Mechanics and Materials, 2012, 229-231:1140-1145. doi: 10.4028/www.scientific.net/AMM.229-231 [14] CORTES C, VAPNIK V.Support-vector networks[J].Machine Learning, 1995, 20(3):273-276. [15] KOHAVI R. A study of cross-validation and bootstrap for accuracy estimation and model selection[C]//Proceedings of the 14th International Joint Conference on Artificial Intelligence. New York: ACM, 1995: 1137-1143. -

 下载:
下载:



 点击查看大图
点击查看大图

计量
- 文章访问数: 1051
- HTML全文浏览量: 205
- PDF下载量: 480
- 被引次数: 0
