



-
摘要:
针对火星探测器着陆时沙尘天气对机器视觉的影响,提出一种去除沙尘天气对光学成像影响的方法,为视觉系统提供清晰输入图像。首先对受沙尘天气影响的图像建立模型,然后求取模型中大气光值与透射系数值。对于大气光值的计算采用基于四叉树细分的方法,在最小值图像上搜寻指定阈值面积中灰度均值最大的区域,在初始图像中相同区域计算各通道均值,作为大气光值。在此基础上计算透射系数,完成清晰图像的恢复。通过对受沙尘影响图像测试表明,该方法能够将受沙尘影响的图像恢复成清晰的图像。即使在复杂的环境中,该方法对光照变化、沙尘强度变化和场景变化等仍具有较好的效果。与其他方法相比,本文方法在去除沙尘对光学图像影响方面效果较好,在恢复图像评价指标等方面优于其他方法,能够进一步提高图像清晰度,为光学图像的后期处理提供更丰富信息。
Abstract:For dust impact on machine vision of the probe landing in Mars, a method was brought forward to remove the effect of dust on optical image and provide clear input image for the visual system. First, a model was built for the dust image. Then, the values of the atmospheric light and the transmission coefficient of the model were obtained by calculation. Among them, a quadtree subdivision approach was employed to calculate the value of the atmospheric light. The computing method was to search the maximal average region of the specified threshold area on the minimum image. Then the mean values of each channel on the same position of the original image were calculated as the estimation value of atmosphere light. And on this basis, the calculation of transmission coefficient was performed. At last, the recovery of the clear picture was finished. Test on dust images indicates that the dust image can be restored to clear image by the proposed method. Even in the complex environment, this method has high robustness to illumination variations, dust intensity change and scene change. Compared to other methods, this method has better effect in removing dust impact on optical images and is superior to other methods in terms of the restoring image evaluation index. It can further improve the clearness of dust images and provide more abundant information for post-processing.
-
Key words:
- image enhancement /
- dust environment /
- quadtree /
- atmospheric light estimation /
- Mars
-

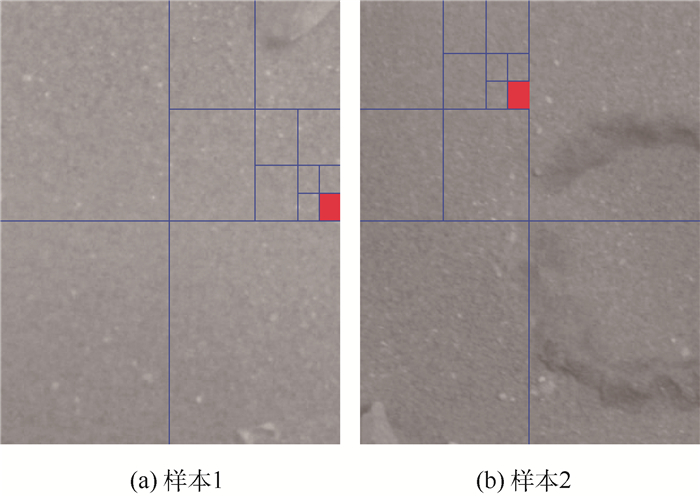
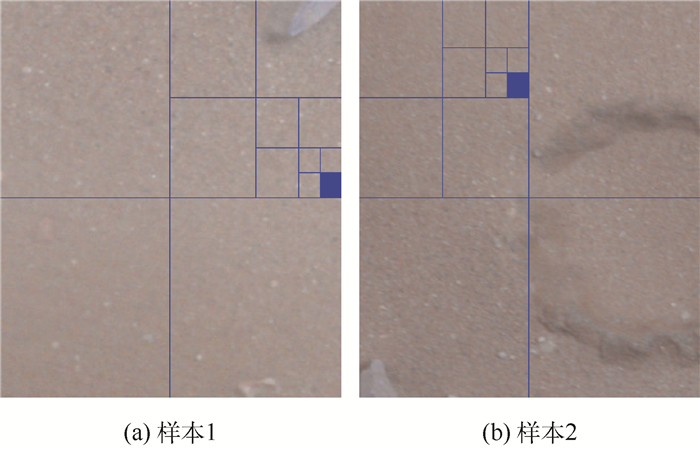
图 10 受沙尘影响图像及设置不同阈值的测试结果
Figure 10. Dust image and test results with different threshold values

图 11 不同光照条件下受沙尘影响图像及对应恢复图像
Figure 11. Images affected by dust in different illumination conditions and corresponding recovered images

图 12 不同沙尘强度下受沙尘影响图像及对应恢复图像
Figure 12. Images affected by dust with different intensities and corresponding recovered images
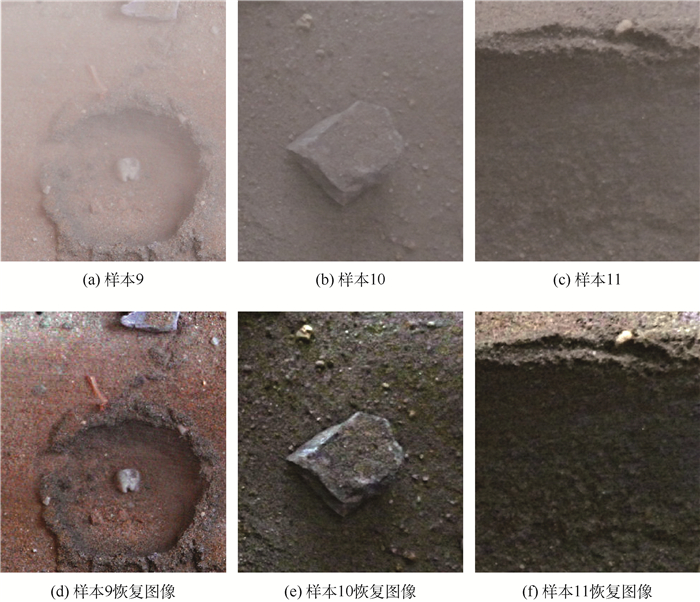
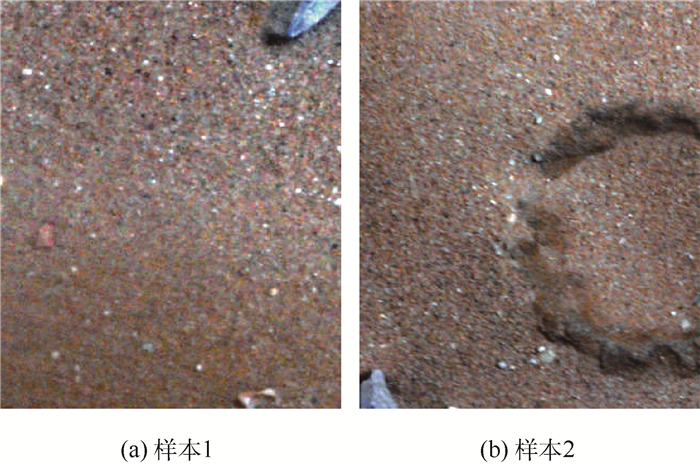
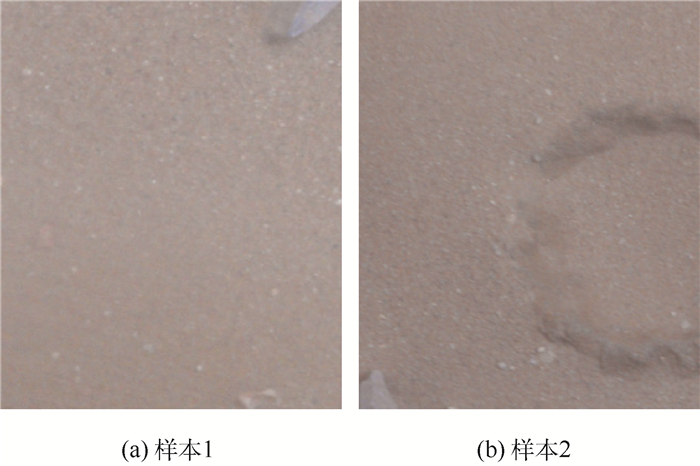
图 13 不同场景下受沙尘影响图像及对应恢复图像
Figure 13. Images affected by dust in different scenarios and corresponding recovered images
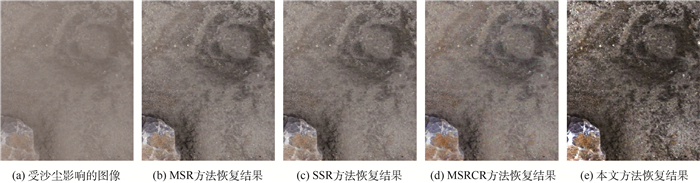
图 14 受沙尘影响图像及各种方法恢复结果对比
Figure 14. Image affected by dust and comparison of recovery results among various methods
表 1 定量分析对比
Table 1. Comparison of quantitative analysis
客观评价指标 初始图像 MSR SSR MSRCR 本文方法 清晰度 3.0222 6.5353 6.5319 6.5368 12.2851 标准差 12.4507 25.6661 25.7078 25.1149 38.3383  下载: 导出CSV
下载: 导出CSV
表 2 边缘强度对比
Table 2. Comparison of edge intensity
客观评价指标 初始图像 MSR SSR MSRCR 本文方法 边缘强度 24.3585 51.88445 51.8465 51.7509 96.1843
下载: 导出CSV
-
[1] 崔平远, 高艾, 于正湜.火星着陆自主导航方案研究进展[J].深空探测学报, 2014, 1(1):18-27.CUI P Y, GAO A, YU Z S.Research progress of autonomous navigation scheme for Mars landing[J]. Journal of Deep Space Exploration, 2014, 1(1):18-27(in Chinese). [2] STEINFELDT B A, GRANT M J, MATZ D A, et al.Guidance, navigation, and control system performance trades for Mars pinpoint landing[J]. Journal of Spacecraft and Rockets, 2010, 47(1):188-198. doi: 10.2514/1.45779 [3] 吴伟仁, 李骥, 黄翔宇, 等.惯导/测距/测速相结合的安全软着陆自主导航方法[J].宇航学报, 2015, 36(8):893-899. http://www.cnki.com.cn/Article/CJFDTotal-YHXB201508005.htmWU W R, LI J, HUANG X Y, et al.INS/rangefinder/velocimetry based autonomous navigation method for safe landing[J]. Journal of Astronautics, 2015, 36(8):893-899(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-YHXB201508005.htm [4] BRAUN R D, MANNING R M.Mars exploration entry, descent and landing challenges[J]. Journal of Spacecraft and Rockets, 2007, 44(2):310-323. doi: 10.2514/1.25116 [5] 陈建清, 朱圣英, 崔祜涛, 等.应用灰度特征的行星陨石坑自主检测方法与着陆导航研究[J].宇航学报, 2014, 35(8):908-915.CHEN J Q, ZHU S Y, CUI H T, et al.Automated crater detection method using gray value features and planet landing navigation research[J]. Journal of Astronautics, 2014, 35(8):908-915(in Chinese). [6] 丁萌. 空间探测器着陆过程中的机器视觉关键技术研究[D]. 南京: 南京航空航天大学, 2010: 11-16.DING M. Research on key technology of machine vision for spacecraft landing[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2010: 11-16(in Chinese). [7] 丁萌, 李海波, 曹云峰, 等.基于光学图像的撞击坑识别研究[J].深空探测学报, 2015, 2(3):195-202.DING M, LI H B, CAO Y F, et al.Research survey of passive image-based impact crater detection[J]. Journal of Deep Space Exploration, 2015, 2(3):195-202(in Chinese). [8] 魏若岩, 阮晓钢, 肖尧, 等.一种小天体表面阴影区的鲁棒匹配算法[J].宇航学报, 2015, 36(2):203-210.WEI R Y, RUAN X G, XIAO Y, et al.A robust match algorithm for asteroid shadow areas[J]. Journal of Astronautics, 2015, 36(2):203-210(in Chinese). [9] 李建国, 崔祜涛, 田阳. 光学辅助惯性测量信息的火星着陆导航算法[C]//中国宇航学会深空探测技术专业委员会第九届学术年会, 2012: 17-20.LI J G, CUI H T, TIAN Y. Vision-aided inertial navigation algorithm for Mars landing[C]//The 9th Academic Annual Meeting of Committee of Deep Space Exploration Technology, Chinese Society of Astronautics, 2012: 17-20(in Chinese). [10] 李建国. 火星探测器自主光学着陆导航方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2014: 42-64.LI J G. Research on autonomous vision navigation methods for spacecraft landing on Mars[D]. Harbin: Harbin Institute of Technology, 2014: 42-64(in Chinese). [11] 李建国, 崔祜涛, 田阳.基于特征匹配的着陆导航敏感器相对校准算法[J].红外与激光工程, 2014, 43(1):267-273.LI J G, CUI H T, TIAN Y.Sensors relative calibration method for landing navigation based on feature matching[J]. Infrared and Laser Engineering, 2014, 43(1):267-273(in Chinese). [12] THOMAS P, GIERASCH P J.Dust devils on Mars[J]. Science, 1985, 230(4722):175-177. doi: 10.1126/science.230.4722.175 [13] REISS D, FENTON L, NEAKRASE L, et al.Dust devil tracks[J]. Space Science Reviews, 2016, 203(1-4):143-181. doi: 10.1007/s11214-016-0308-6 [14] STATELLA T, PINA P, DA SILVA E A.Automated determination of the orientation of dust devil tracks in mars orbiter images[J]. Advances in Space Research, 2014, 53(12):1822-1833. doi: 10.1016/j.asr.2013.05.012 [15] RENNÓ N O, BURKETT M L, LARKIN M P.A simple thermos dynamical theory for dust devils[J]. Journal of the Atmospheric Sciences, 1998, 55(21):3244-3252. doi: 10.1175/1520-0469(1998)055<3244:ASTTFD>2.0.CO;2 [16] LORENZ R D, BALME M R, GU Z, et al.History and applications of dust devil studies[J]. Space Science Reviews, 2016, 203(1-4):5-37. doi: 10.1007/s11214-016-0239-2 [17] HANEL R A, CONRATH B J, HOVIS W A, et al.Infrared spectroscopy experiment on the Mariner 9 mission:Preliminary results[J]. Science, 1972, 175(4019):305-308. doi: 10.1126/science.175.4019.305 [18] HANEL R, CONRATH B, HOVIS W, et al.Investigation of the Martian environment by infrared spectroscopy on Mariner 9[J]. Icarus, 1972, 17(2):423-442. doi: 10.1016/0019-1035(72)90009-7 [19] HANEL R, SCHLACHMAN B, BREIHAN E, et al.Mariner 9 michelson interferometer[J]. Applied Optics, 1972, 11(11):2625-2634. doi: 10.1364/AO.11.002625 [20] 赵苏齐, 吴健珍.基于Retinex的雾霾图像去雾算法[J].科教导刊, 2016(4):156-157.ZHAO S Q, WU J Z.Defogging images based on Retinex theory[J]. Scientific and Technological Innovation, 2016(4):156-157(in Chinese). [21] 刘志晨, 徐惠民.基于单尺度Retinex算法的雾霾图像清晰化系统开发研究[J].国土与自然资源研究, 2017(1):71-73. http://www.cnki.com.cn/Article/CJFDTOTAL-GTZY201701020.htmLIU Z C, XU H M.Research on haze image clarity system based on single scale Retinex algorithm[J]. Territory & Natural Resources Study, 2017(1):71-73(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-GTZY201701020.htm [22] 张雅媛.基于多尺度Retinex算法的彩色雾霾图像增强研究[J].包装学报, 2016, 8(3):60-65.ZHANG Y Y.Research of haze color image enhancement based on multi-scale Retinex[J]. Packaging Journal, 2016, 8(3):60-65(in Chinese). [23] WANG H, WANG Y, CAO M, et al.Influence of atmospheric visibility on laser pulse delay and broadening in sand and dust weather[J]. Acta Optica Sinica, 2015, 35(7):9-16. [24] WANG Y, LI Y, ZHANG T. The method of image restoration in the environments of dust[C]//International Conference on Mechatronics and Automation (ICMA). Piscataway, NJ: IEEE Press, 2010: 294-298. [25] WANG Y Y, YANG C Y, WANG X K.The dedusting method based on a single still image[J]. Applied Mechanics and Materials, 2013, 333-335:929-933. doi: 10.4028/www.scientific.net/AMM.333-335 [26] NARASIMHAN S G, NAYAR S K.Vision and the atmosphere[J]. International Journal of Computer Vision, 2002, 48(3):233-254. doi: 10.1023/A:1016328200723 [27] NARASIMHAN S G, NAYAR S K. Chromatic framework for vision in bad weather[C]//IEEE Conference on Computer Vision and Pattern Recognition. Piscataway, NJ: IEEE Press, 2002, 1: 598-605. [28] HE K, SUN J, TANG X.Single image haze removal using dark channel prior[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 2011, 33(12):2341-2353. [29] HE K, SUN J. Fast guided filter[EB/OL]. New York: Cornell University Library, 2015[2017-03-29]. -

 下载:
下载:




 点击查看大图
点击查看大图
计量
- 文章访问数: 834
- HTML全文浏览量: 155
- PDF下载量: 423
- 被引次数: 0
