



Joint optimization of detection and tracking with Rao-Blackwellized Monte Carlo data association
-
摘要:
提出了基于Rao-Blackwellized蒙特卡罗数据关联的雷达目标检测跟踪联合优化算法。Rao-Blackwellization方法将单目标跟踪与数据关联分开处理,将序贯蒙特卡罗方法(粒子滤波)用于数据关联,实现杂波与虚警量测中的多目标跟踪。同时,根据粒子的分布范围确定波门大小。在考虑粒子权重的前提下,利用检测单元与所有粒子的相对位置对检测门限进行修正,提高检测率。将本文算法与已经实现的基于空域特性的杂波抑制算法相结合,分别应用于仿真数据、S波段相参与非相参雷达实测数据。实验结果表明,本文算法能够在粒子数较少的情况下,实现对小弱目标的检测与跟踪。
Abstract:A joint optimization algorithm was proposed for radar target detection and tracking with Rao-Blackwellized Monte Carlo data association. Rao-Blackwellization made the separation of single target tracking and data association, where the data association was solved by the sequential Monte Carlo method (particle filtering), leading to the multiple target tracking in the environment of clutter and false alarm measurements. Meanwhile, the size of the wave gate depended on the distribution range of particles. Under the consideration of the particle weights, the detection threshold was modified with the relative position of the detection units to all the particles, improving the detection rate. Finally, combined with the algorithm for clutter suppression with spatial features achieved in the previous research, the proposed algorithm was applied to the simulated data as well as the ground-truth data collected by the S-band incoherent and coherent radars. It is demonstrated that the proposed algorithm can realize the detection and tracking of small targets with relatively small number of particles.
-
Key words:
- data association /
- radar /
- target /
- detection /
- tracking
-

图 1 目标检测跟踪联合优化算法流程图
Figure 1. Flowchart of joint optimization algorithm for target detection and tracking

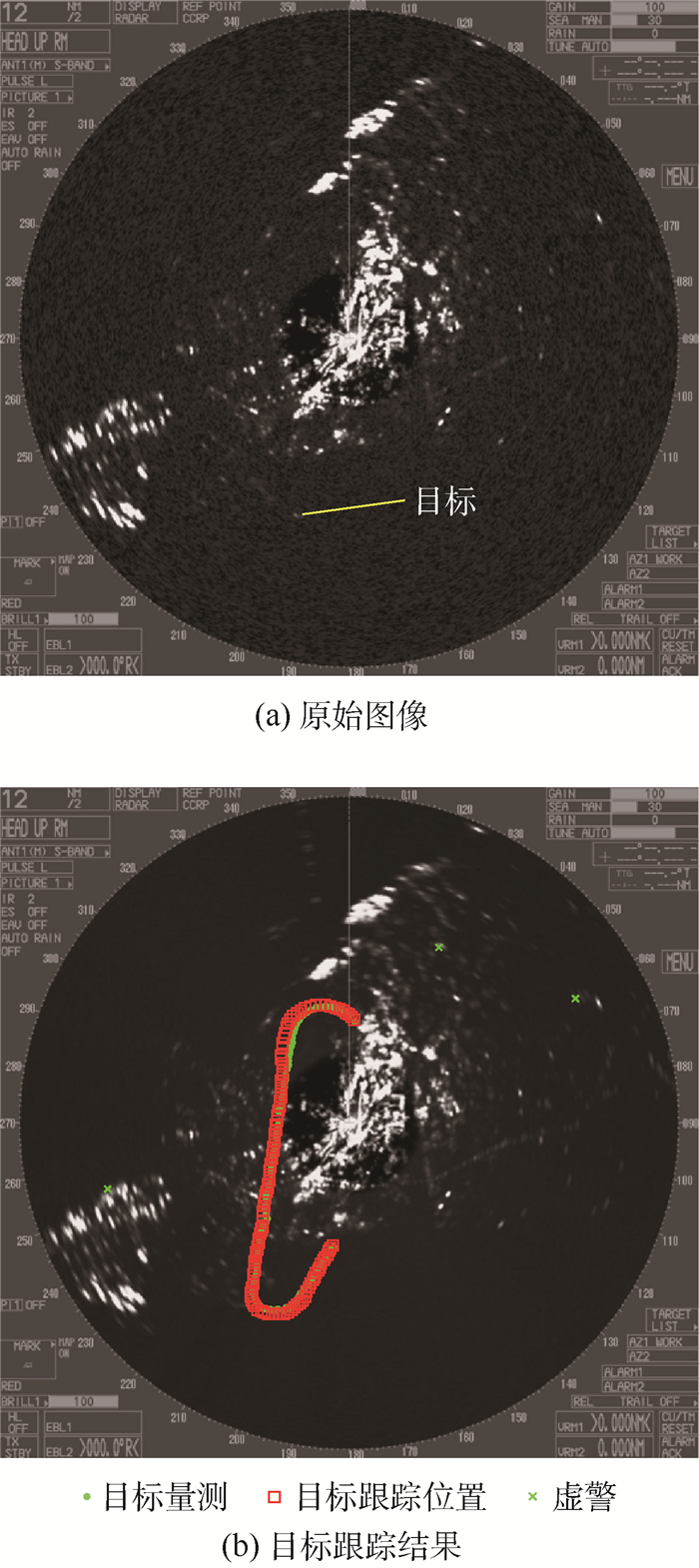
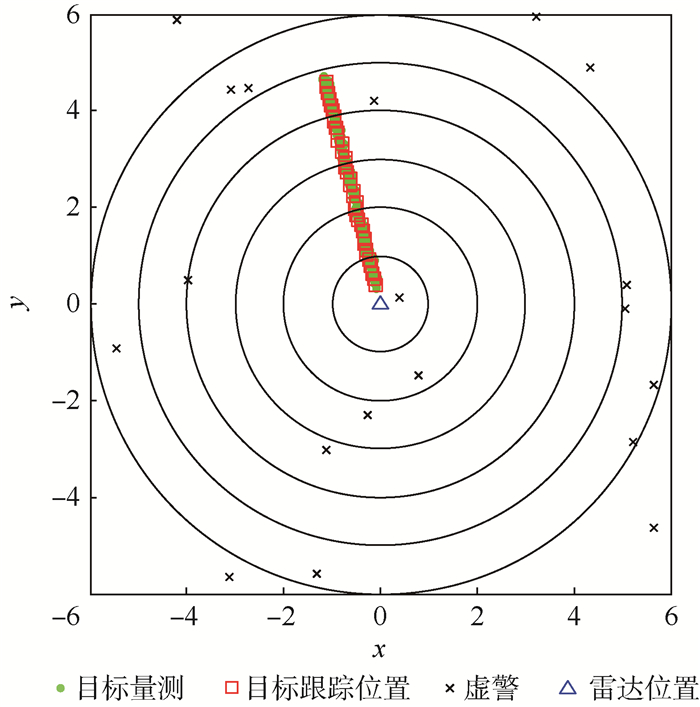
图 4 S波段非相参雷达目标检测与跟踪结果
Figure 4. Target detection and tracking results of S-band incoherent radar

图 5 S波段相参雷达无人机目标检测与跟踪结果
Figure 5. UAV target detection and tracking results of S-band coherent radar
表 1 不同粒子数情况下模型1的RMSE值
Table 1. RMSE values of Model 1 with different numbers of particles
θ RMSE N=10 N=50 N=100 0.5 0.1287 0.1289 0.1294 1.0 0.1314 0.1313 0.1318 1.5 0.1342 0.1336 0.1347 2.0 0.1375 0.1380 0.1375 2.5 0.1406 0.1409 0.1408 3.0 0.1437 0.1441 0.1446  下载: 导出CSV
下载: 导出CSV
表 2 不同粒子数情况下模型2的RMSE值
Table 2. RMSE values of Model 2 with different numbers of particles
θ RMSE N=10 N=50 N=100 0.5 0.1266 0.1265 0.1265 1.0 0.1273 0.1270 0.1267 1.5 0.1282 0.1279 0.1280 2.0 0.1291 0.1296 0.1291 2.5 0.1311 0.1305 0.1307 3.0 0.1325 0.1328 0.1329
下载: 导出CSV
表 3 不同粒子数情况下模型3的RMSE值
Table 3. RMSE values of Model 3 with different numbers of particles
θ RMSE N=10 N=50 N=100 0.5 0.1266 0.1264 0.1264 1.0 0.1264 0.1265 0.1264 1.5 0.1268 0.1259 0.1267 2.0 0.1270 0.1272 0.1271 2.5 0.1284 0.1283 0.1282 3.0 0.1291 0.1296 0.1285
下载: 导出CSV
表 4 不同粒子数情况下模型4的RMSE值
Table 4. RMSE values of Model 4 with different numbers of particles
θ RMSE N=10 N=50 N=100 0.5 0.1266 0.1269 0.1265 1.0 0.1262 0.1258 0.1263 1.5 0.1266 0.1265 0.1262 2.0 0.1263 0.1265 0.1260 2.5 0.1272 0.1266 0.1272 3.0 0.1275 0.1275 0.1275
下载: 导出CSV
表 5 S波段非相参雷达目标检测结果对比
Table 5. Comparison of target detection results of S-band incoherent radar
θ FT+MP CA-CFAR+MP SO-CFAR+MP 本文算法+MP Nd Nfa Nd Nfa Nd Nfa Nd Nfa 30 119 16030 114 3320 119 16053 120 3504 40 119 9357 114 2469 119 9368 120 1032 50 116 5674 113 1886 116 5679 120 329 60 114 3539 111 1492 114 3541 120 105 70 112 2077 109 1124 112 2077 120 36 80 112 1197 110 774 112 1197 119 16 90 109 645 107 473 109 645 119 10 100 108 331 107 284 108 331 119 6 110 106 147 105 136 106 147 119 3 120 104 44 104 41 104 44 119 1
下载: 导出CSV
表 6 S波段相参雷达无人机目标检测结果对比
Table 6. Comparison of UAV target detection results of S-band coherent radar
θ FT算法 本文算法 Nd Nfa Nd Nfa 0.01 327 21 339 21 0.02 273 21 339 21 0.03 201 17 339 17
下载: 导出CSV
-
[1] 韩崇昭, 朱洪艳, 段战胜, 等.多源信息融合[M].北京:清华大学出版社, 2006:320-365.HAN C Z, ZHU H Y, DUAN Z S, et al.Multi-source information fusion[M]. Beijing:Tsinghua University Press, 2006:320-365(in Chinese). [2] ASLAN M S, SARANL A.Threshold optimization for tracking a nonmaneuvering target[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011, 37(2):2844-2859. [3] 吕信明.军用无人机的发展及对策[J].国防科技, 2013, 34(1):5-7. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gfkj201301002LV X M.Military UAV development and countermeasures[J]. National Defense Science & Technology, 2013, 34(1):5-7(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gfkj201301002 [4] 何煦.对低空小型无人机的对抗方法研究[J].中国新通信, 2016, 18(15):147-149. doi: 10.3969/j.issn.1673-4866.2016.15.123HE X.Research on countermeasures against low-altitude small UAV[J]. China New Telecommunications, 2016, 18(15):147-149(in Chinese). doi: 10.3969/j.issn.1673-4866.2016.15.123 [5] RICHARDS M A.Fundamentals of radar signal processing[M]. New York:McGraw-Hill, 2005:1-15. [6] SKOLNIK M I.Introduction to radar systems[M]. New York:McGraw-Hill, 2002:5-10. [7] BAR-SHALOM Y, LI X R, KIRUBARAJAN T. Estimation with application to tracking and navigation: Theory algorithms and software[M]. New York: John Wiley & Sons, Inc., 2001: 35-42. [8] LI X R, JILKOV V P.Survey of maneuvering target tracking, Part Ⅴ:Multiple-model methods[J]. IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(4):1255-1321. doi: 10.1109/TAES.2005.1561886 [9] BLACKMAN S S.Multiple hypothesis tracking for multiple target tracking[J]. IEEE Aerospace and Electronic Systems Magazine, 2004, 19(1-2):5-18. [10] 王云奇. 知识辅助检测跟踪一体化算法研究[D]. 成都: 电子科技大学, 2014: 4-12.WANG Y Q. Research of detection-tracking-integration algorithm with knowledge-aided[D]. Chengdu: University of Electronic Science and Technology of China, 2014: 4-12(in Chinese). [11] 刘红亮, 周生华, 刘宏伟, 等.一种航迹恒虚警的目标检测跟踪一体化算法[J].电子与信息学报, 2016, 38(5):1072-1078. http://www.cnki.com.cn/Article/CJFDTotal-DZYX201605008.htmLIU H L, ZHOU S H, LIU H W, et al.An integrated target detection and tracking algorithm with constant track false alarm rate[J]. Journal of Electronics & Information Technology, 2016, 38(5):1072-1078(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-DZYX201605008.htm [12] 严俊坤, 刘红亮, 戴奉周, 等.一种具有恒虚警性质的检测跟踪联合处理算法[J].电子与信息学报, 2014, 36(11):2666-2671. http://www.cnki.com.cn/Article/CJFDTotal-DZYX201411021.htmYAN J K, LIU H L, DAI F Z, et al.Joint detection and tracking processing algorithm with constant false alarm rate property[J]. Journal of Electronics & Information Technology, 2014, 36(11):2666-2671(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-DZYX201411021.htm [13] 闫学昭. 雷达目标检测与跟踪交互处理[D]. 大连: 大连海事大学, 2011: 35-40.YAN X Z. Radar target detection and tracking interactive processing[D]. Dalian: Dalian Maritime University, 2011: 35-40(in Chinese). [14] KOKKALA J, SÄRKKÄ S.Combining particle MCMC with Rao-Blackwellized Monte Carlo data association for parameter estimation in multiple target tracking[J]. Digital Signal Processing, 2015, 47:84-95. doi: 10.1016/j.dsp.2015.04.004 [15] MCHUGH J M, KONRAD J, SALIGRAMA V, et al.Foreground-adaptive background subtraction[J]. IEEE Signal Processing Letters, 2009, 16(5):390-393. doi: 10.1109/LSP.2009.2016447 [16] STAUFFER C, GRIMSON E.Learning patterns of activity using real-time tracking[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(8):747-757. doi: 10.1109/34.868677 [17] 黄培康, 殷红成, 许小剑.雷达目标特性[M].北京:电子工业出版社, 2005:114.HUANG P K, YIN H C, XU X J.Radar target characteristics[M]. Beijing:Publishing House of Electronics Industry, 2005:114(in Chinese). [18] 陈唯实, 李敬.基于空域特性的低空空域雷达目标检测[J].航空学报, 2015, 36(9):3060-3068. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=hkxb201509028CHEN W S, LI J.Radar target detection in low-altitude airspace with spatial features[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(9):3060-3068(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=hkxb201509028 [19] GONZALEZ R C, WOODS R E, EDDINS S L.Digital image processing using MATLAB[M]. Englewood Cliffs:Prentice Hall, 2009:261-268. -

 下载:
下载:



 点击查看大图
点击查看大图

计量
- 文章访问数: 849
- HTML全文浏览量: 187
- PDF下载量: 443
- 被引次数: 0
