



-
摘要:
针对非线性非高斯系统在实际工作环境中受强噪声干扰影响导致的故障诊断精度低的问题,提出了一种状态转移密度方差自适应更新的代价评估粒子滤波(CRPF)故障诊断方法。通过设计观测值与先验状态之间的相关性判别函数,根据噪声和误差的大小实时自适应调整状态转移密度方差,增强算法对强噪声干扰的适应能力;研究了残差自适应阈值的设计方法,通过引入滑动窗求区间均值代替基于参数置信区间自适应阈值的均值和方差,在保证故障诊断准确性的前提下减少计算时间。以160 MW燃油机组为例,通过对不同强噪声环境下的汽包水位传感器故障诊断实例分析,结果表明该方法在复杂噪声环境下故障诊断的准确性得到了明显提高,同时减少了计算时间。
Abstract:Aimed at the problem of low precision in fault diagnosis of nonlinear non-Gaussian system due to serious noise interference under the actual working condition, this paper puts forward a new fault diagnosis method, which can adaptively update the state transition density variance of a cost reference particle filter (CRPF). By designing the correlation discriminant function between the measurement value and the prior state, the variance of the state transition density was adjusted adaptively according to the magnitudes of noise and error, and the adaptability of the algorithm to strong noise interference is dramatically enhanced. Furthermore, the method for designing adaptive threshold of residual was studied, and the sliding window was also introduced to calculate the mean of interval instead of the mean and variance of the adaptive threshold based on parameter confidence interval, which was expected to reduce the calculation time under the premise of ensuring the accuracy of fault diagnosis. Taking 160 MW fuel unit as an example, drum level sensor fault diagnoses under different strong noise conditions were analyzed. From the results, it is found that the accuracy of fault diagnosis in the complex noise environment is obviously improved and the computation time is greatly reduced.
-

图 1 伽马噪声背景下2种算法对x1和x2的跟踪误差对比
Figure 1. Tracking error comparison of x1 and x2 between two algorithms under condition of Gamma noise

图 2 高斯混合噪声背景下2种算法对x1和x2的跟踪误差对比
Figure 2. Tracking error comparison of x1 and x2 between two algorithms under condition of Gaussian mixture noise
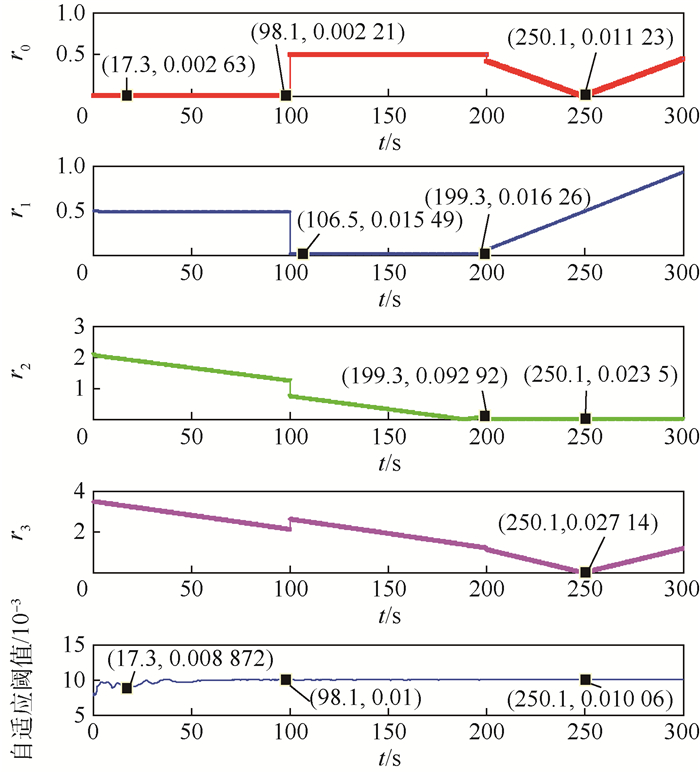
图 4 伽马噪声背景下故障检测及隔离
Figure 4. Fault detection and isolation under condition of Gammanoise

图 5 高斯混合噪声背景下故障检测及隔离
Figure 5. Fault detection and isolation under condition of Gaussian mixture noise
表 1 不同噪声背景下x1、x2的平均绝对误差
Table 1. Mean absolute errors of x1 and x2 under different noise conditions
状态 伽马噪声 高斯混合噪声 改进前 改进后 改进前 改进后 x1 0.011 1 0.008 2 0.195 2 0.009 5 x2 3.575 0 1.707 1 4.365 9 0.886 0  下载: 导出CSV
下载: 导出CSV
-
[1] JIN X H, QIAO W, PENG Y Y, et al.Quantitative evaluation of wind turbine faults under variable operational conditions[J].IEEE Transactions on Industry Applications, 2016, 52(3):2061-2069. doi: 10.1109/TIA.2016.2519412 [2] PARK J, HA J M, OH H, et al.Model-based fault diagnosis of a planetary gear:A novel approach using transmission error[J].IEEE Transactions on Reliability, 2016, 65(4):1830-1841. doi: 10.1109/TR.2016.2590997 [3] SUN Y S, RAN X R, LI Y M, et al.Thruster fault diagnosis method based on Gaussian particle filter for autonomous underwater vehicles[J].International Journal of Naval Architecture and Ocean Engineering, 2016, 8(3):243-251. doi: 10.1016/j.ijnaoe.2016.03.003 [4] 万磊, 杨勇, 李岳明.水下机器人执行器的高斯粒子滤波故障诊断方法[J].上海交通大学学报, 2013, 47(7):1072-1076.WAN L, YANG Y, LI Y M.Actuator fault diagnosis of automa-tic under water vehicle using Gaussian particle filter[J].Journal of Shanghai Jiaotong University, 2013, 47(7):1072-1076(in Chinese). [5] 曹洁, 李伟, 李军, 等.强噪声背景下鲁棒的说话人跟踪方法[J].华中科技大学学报(自然科学版), 2015, 43(10):363-366.CAO J, LI W, LI J, et al.Robust speaker tracking under the background of strong noise[J].Journal of Huazhong University of Science and Technology(Natural Science Edition), 2015, 43(10):363-366(in Chinese). [6] 王强, 刘永葆, 贺星, 等.噪声方差自适应修正的混合系统故障诊断方法[J].振动与冲击, 2016, 35(8):14-20.WANG Q, LIU Y B, HE X, et al.A hybrid-system fault-diagnosis method based on noise-variance adaptive correction[J].Journal of Vibration and Shock, 2016, 35(8):14-20(in Chinese). [7] MÍGUEZ J, BUGALLO M F, DJURIC'P M.A new class of particle fllters for random dynamical systems with unknown statistics[J].EURASIP Journal on Applied Signal Processing, 2004(15):2287-2294. doi: 10.1155/S1110865704406039 [8] 胡振涛, 潘泉, 杨峰, 等.基于CRPF的残差似然比检验故障诊断算法[J].系统工程与电子技术, 2009, 31(12):3022-3025. doi: 10.3321/j.issn:1001-506X.2009.12.049HU Z T, PAN Q, YANG F, et al.Residual likelihood ratio test for fault diagnosis based on cost reference particle filter[J].Systems Engineering and Electronics, 2009, 31(12):3022-3025(in Chinese). doi: 10.3321/j.issn:1001-506X.2009.12.049 [9] 卢锦, 苏洪涛, 水鹏朗.采用代价参考粒子滤波器估计天波雷达目标状态[J].西安电子科技大学学报, 2013, 40(5):20-25. http://www.cnki.com.cn/Article/CJFDTOTAL-XDKD201305005.htmLU J, SU H T, SHUI P L.Target state estimation of the over-the-horizon radar using the cost reference particle filter[J].Journal of Xidian University, 2013, 40(5):20-25(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-XDKD201305005.htm [10] LIM J.Particle filtering for nonlinear dynamic state systems with unknown noise statistics[J].Nonlinear Dynamics, 2014, 78(2):1369-1388. doi: 10.1007/s11071-014-1523-x [11] YU Y H.Combining H∞ fllter and cost-reference particle fllter for conditionally linear dynamic systems in unknown non-Gaussian noises[J].Signal Processing, 2013, 93(7):1871-1878. doi: 10.1016/j.sigpro.2012.12.014 [12] LIM J, KIM T, HONG D.Estimating the number of competing terminals by cost-reference particle filtering in non-saturated wireless-LAN[J].Telecommunication System, 2016, 62(3):519-527. doi: 10.1007/s11235-015-0091-9 [13] SHI Z, GU F, LENNOX B, et al.The development of an adaptive threshold for model-based fault detection of a nonlinear electro-hydraulic system[J].Control Engineering Practice, 2005, 13(11):1357-1367. doi: 10.1016/j.conengprac.2004.11.014 [14] 蒋栋年, 李炜.基于自适应阈值的粒子滤波非线性系统故障诊断[J].北京航空航天大学学报, 2016, 42(10):2099-2106.JIANG D N, LI W.Fault diagnosis of particle filter nonlinear systems based on adaptive threshold[J].Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(10):2099-2106(in Chinese). [15] HASHEMI A, PISU P. Adaptive threshold-based fault detection and isolation for automotive electrical systems[C]//20119th World Congress on Intelligent Control and Automation. Piscataway, NJ: IEEE Press, 2011: 1013-1018. [16] 郭健彬, 纪丁菲, 王鑫, 等.混杂系统粒子滤波混合状态估计及故障诊断算法[J].系统工程与电子技术, 2015, 37(8):1936-1942. doi: 10.3969/j.issn.1001-506X.2015.08.33GUO J B, JI D F, WANG X, et al.Hybrid state estimation and fault diagnosis algorithm of hybrid systems using particle filter[J].Systems Engineering and Electronics, 2015, 37(8):1936-1942(in Chinese). doi: 10.3969/j.issn.1001-506X.2015.08.33 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 953
- HTML全文浏览量: 158
- PDF下载量: 469
- 被引次数: 0
