



-
摘要:
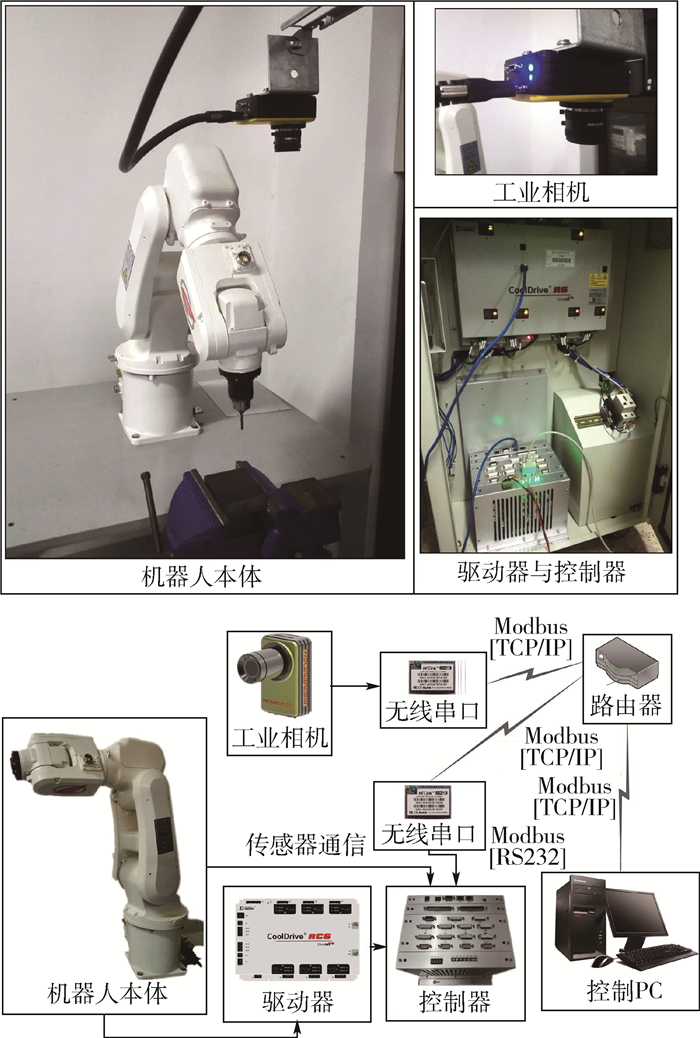
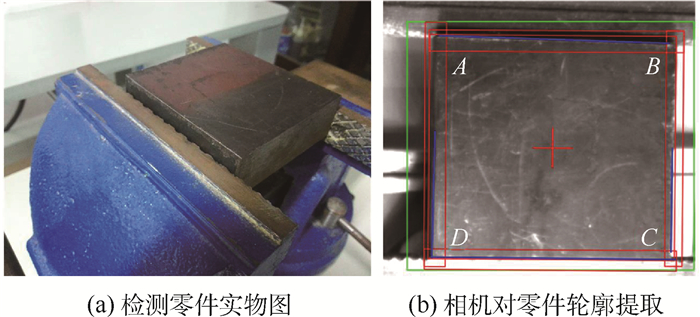
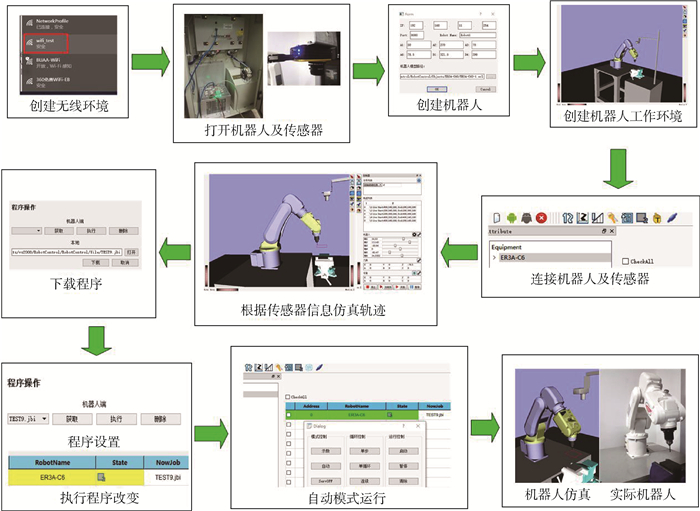
基于信息物理融合系统(CPS)的工业机器人系统是智能制造的使能技术和设备,提出了一种基于CPS方法的工业机器人系统,实现了物理世界和信息世界的融合。系统分为物理层、网络层、控制层和应用层。物理层的数据通过网络层上传给控制层,更新物理世界在信息世界的信息;应用层对其进行优化、决策;控制层将决策转变为设备的控制信息,通过网络层实现物理层的控制。采用该方法实现的工业机器人系统,在ER3A-C60型工业机器人上,采用自制的控制系统和MICRO-6013CM型工业相机进行验证,证实了该方法的可行性。
-
关键词:
- 信息物理融合系统(CPS) /
- 工业机器人 /
- 控制系统 /
- Modbus /
- 仿真
Abstract:Industrial robot system based on cyber-physical system (CPS) is a key and enabling technology for intelligent manufacturing. This paper presents an industrial robot system based on CPS approach, which is the fusion of physical world and information world. The system is divided into physical layer, network layer, control layer and application layer. Data from the physical layer are sent to the control layer via the communication layer to update the data in the information world. The application layer analyzes and optimizes these data to make decisions. In the control layer, the decisions are transformed into the device control data. The control data are sent to the physical layer to control the devices through the communication layer. A machining experiment is conducted to validate the feasibility of the method by using the ER3A-C60 industrial robot, MICRO-6013CM smart camera and in-house industrial control system.
-
Key words:
- cyber-physical system (CPS) /
- industrial robot /
- control system /
- Modbus /
- simulation
-

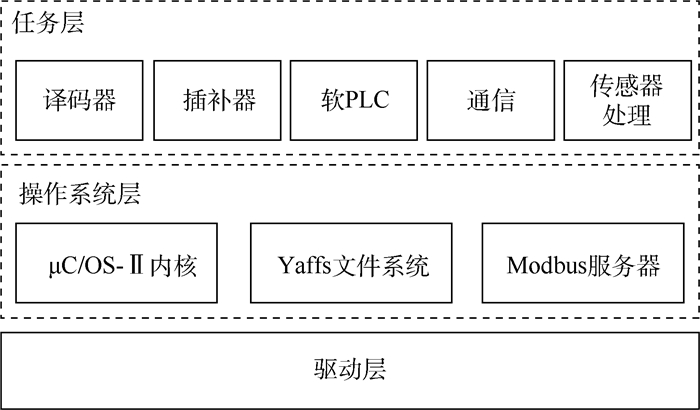
图 2 基于CPS方法的机器人系统的具体组成
Figure 2. Specific components of industrial robot system based on CPS approach
-
[1] LEITÃO P, COLOMBO A W, KARNOUSKOS S.Industrial automation based on cyber-physical systems technologies:Prototype implementations and challenges[J].Computers in Industry, 2016, 81(s1):11-25. doi: 10.1016/j.compind.2015.08.004 [2] 何积丰.Cyber-physical systems[J].中国计算机学会通讯, 2010, 6(1):25-30.HE J F.Cyber-physical systems[J].Communications of the China Computer Federation, 2010, 6(1):25-30(in Chinese). [3] WANG L, TÖRNGREN M, ONORI M.Current status and advancement of cyber-physical systems in manufacturing[J].Journal of Manufacturing Systems, 2015, 37(2):517-527. [4] LEE E A. Cyber physical systems: Design challenges[C]//11th IEEE Symposium on Object/Component/Service-Oriented Real-Time Distributed Computing. Piscataway, NJ: IEEE Press, 2008: 363-369. [5] U. S. Government, National Institute of Standards and Technology. Foundations for innovation: Strategic R & D opportunities for 21st century cyber-physical systems-connecting computer and information systems with the physical world, robots, autonomous vehicles[R]. Washington, D. C. : NIST, 2015. [6] MICHNIEWICZ J, REINHART G.Cyber-physical-robotics-Modelling of modular robot cells for automated planning and execution of assembly tasks[J].Mechatronics, 2016, 34(s1):170-180. [7] CHEN J, YANG J, ZHOU H, et al.CPS modeling of CNC machine tool work processes using an instruction-domain based approach[J].Engineering, 2015, 1(2):247-260. doi: 10.15302/J-ENG-2015054 [8] CHEN W L, CAO R M, HAO L N, et al. Researches on robot system architecture in CPS[C]//2015 IEEE International Conference on Cyber Technology in Automation, Control, and Inte-lligent Systems. Piscataway, NJ: IEEE Press, 2015: 603-607. [9] LUO R C, KUO C W.Intelligent seven-DoF robot with dynamic obstacle avoidance and 3-D object recognition for industrial cyber-physical systems in manufacturing automation[J].Procee-dings of the IEEE, 2016, 104(5):1102-1113. doi: 10.1109/JPROC.2015.2508598 [10] COLOMBO A W, KARNOUSKOS S.Towards the factory of the future:A service-oriented cross-layer infrastructure[J].ICT Shaping the World:A Scientific View, 2009, 2009:65-81. [11] 温景容, 武穆清, 宿景芳.信息物理融合系统[J].自动化学报, 2012, 38(4):507-517.WEN J R, WU M Q, SU J F.Cyber-physical system[J].Acta Automatica Sinica, 2012, 38(4):507-517(in Chinese). [12] TAN Y, GODDARD S, REZ L C.A prototype architecture for cyber-physical systems[J].ACM Sigbed Review, 2008, 5(1):1-2. doi: 10.1145/1366283.1366309 [13] 王小乐, 陈丽娜, 黄宏斌, 等.一种面向服务的CPS体系框架[J].计算机研究与发展, 2010, 47(s2):299-303.WANG X Y, CHEN L N, HUANG H B, et al.A service-oriented architecture framework of cyber-physical systems[J].Journal of Computer Researche and Development, 2010, 47(s2):299-303(in Chinese). [14] 王田苗, 陶永.我国工业机器人技术现状与产业化发展战略[J].机械工程学报, 2014, 50(9):1-13.WANG T M, TAO Y.The present situation of industrial robot technology in China and the strategy of industrialization deve-lopment[J].Chinese Journal of Mechanical Engineering, 2014, 50(9):1-13(in Chinese). [15] Modbus IDA. Modbus application protocol specification v1. 1a[EB/OL]. (2004-06-04)[2017-07-01]. -

 下载:
下载:





 点击查看大图
点击查看大图

计量
- 文章访问数: 1243
- HTML全文浏览量: 161
- PDF下载量: 505
- 被引次数: 0
