



-
摘要:
针对超宽带(UWB)测距过程中随机出现的奇异值,设计了改进的基于最小协方差的马氏距离奇异值检测模块;针对全向机器人的运动学和动力学特点,提出了一种基于滑模+PID控制的逆动力学前馈轨迹跟踪算法;针对UWB定位算法中出现的坐标跳动、边缘效应以及微型四旋翼的运动学特点,设计了基于扩展卡尔曼滤波(EKF)的轨迹跟踪控制算法;并在MATLAB和Gazebo仿真软件中分别进行了验证。为在实际环境验证轨迹跟踪控制算法的速度闭环控制和位置闭环控制以及UWB定位的实时性、准确性,搭建了基于UWB的异构多机器人系统,完成了四旋翼定点悬停、单个全向机器人轨迹跟踪、异构多机器人协同控制实验。实验结果表明,UWB定位系统和机器人控制算法能够满足控制的实时性和稳定性要求。
Abstract:Aimed at random occurrence of singular value in the process of ultra wide band (UWB) ranging, the traditional Mahalanobis distance detection algorithm is improved, and the Mahalanobis distance singular value detection module based on minimum covariance is designed. Based on the omnidirectional robots' kinematic and dynamic characteristics, the inverse dynamic feedforward trajectory tracking algorithm based on sliding mode control and PID control is proposed. Aimed at the coordinate jump, the edge effect and the kinematic characteristics of the micro four rotor in UWB positioning algorithm, a trajectory tracking control method based on extended Kalman filter (EKF) is designed. In MATLAB and Gazebo simulation software, the tracking control algorithm of omnidirectional robot and nano-quadrotor is verified. In order to verify the real-time feature and accuracy of the closed-loop velocity and position control and UWB positioning for trajectory tracking control algorithm in real environment, a heterogeneous multi-robot system based on UWB was built to complete the nano-quadrotor hovering, single omnidirectional robot trajectory tracking, and heterogeneous multi-robot cooperative control experiments. The experimental results show that the UWB positioning system and the robot control algorithm can meet the requirements of real-time and stable control.
-
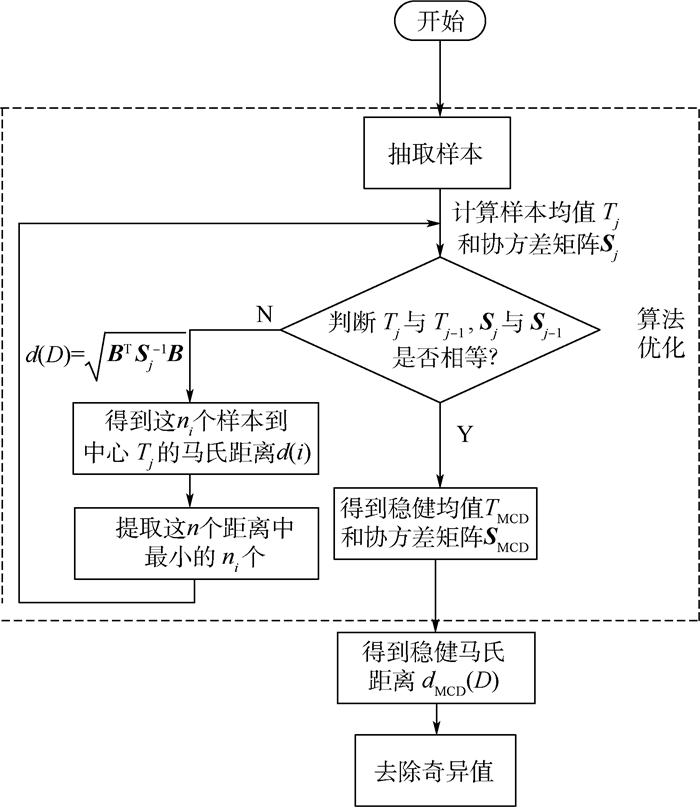
图 3 基于MCD的马氏距离奇异值检测算法流程图
Figure 3. Flowchart of Mahalanobis distance singular value detection algorithm based on MCD
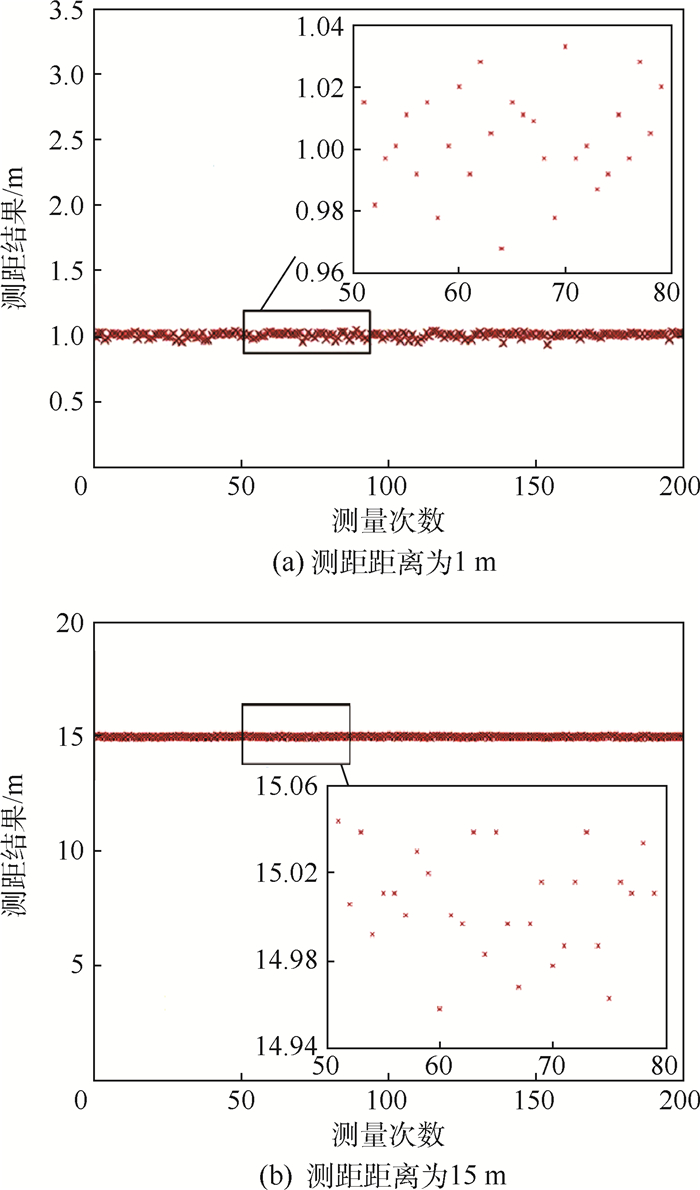
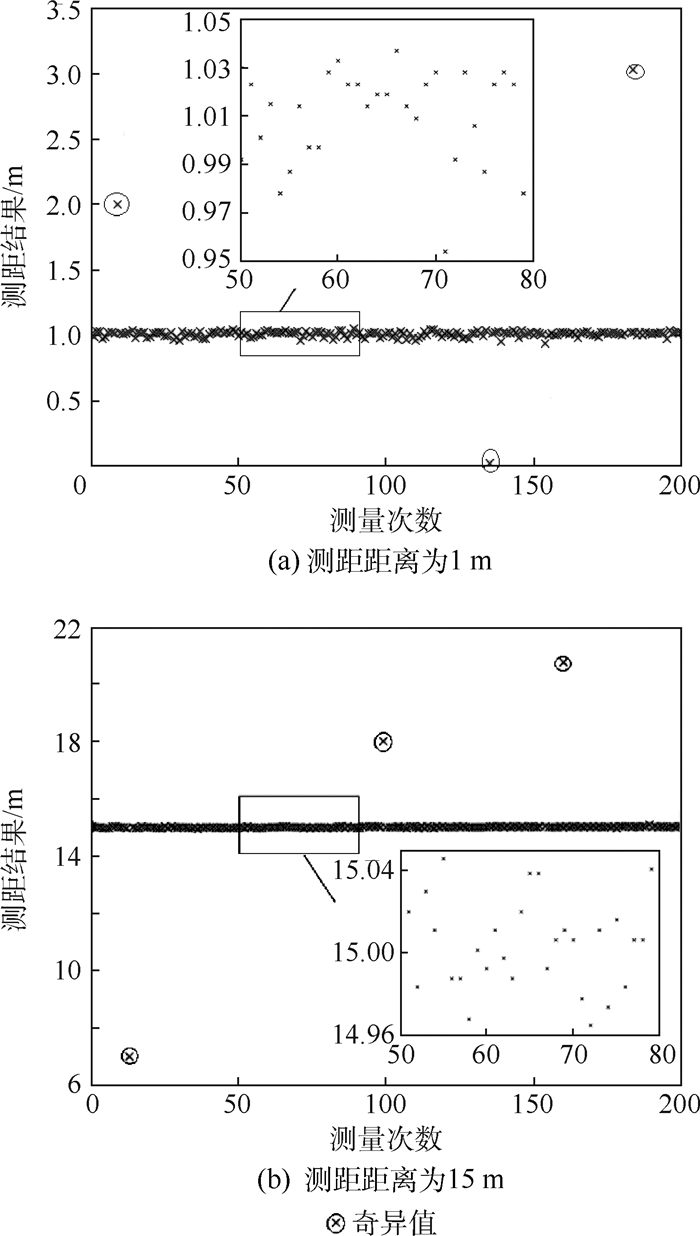
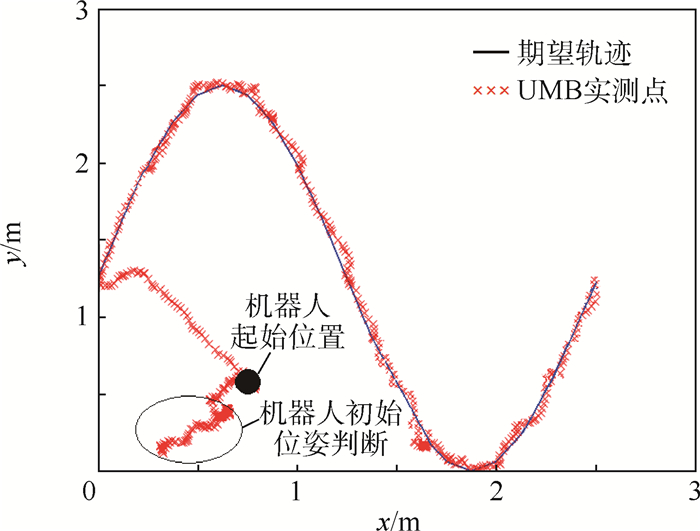
图 4 基于稳健马氏距离奇异值去除之后的测距结果
Figure 4. Ranging results based on robust Mahalanobis distance after removal of singular value

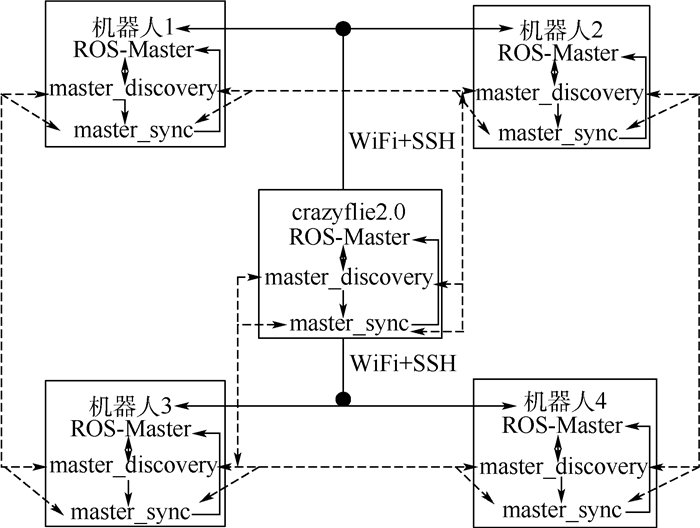
图 7 基于UWB的crazyflie2.0自主控制流程图
Figure 7. Flowchart of crazyflie2.0 autonomous control based on UWB
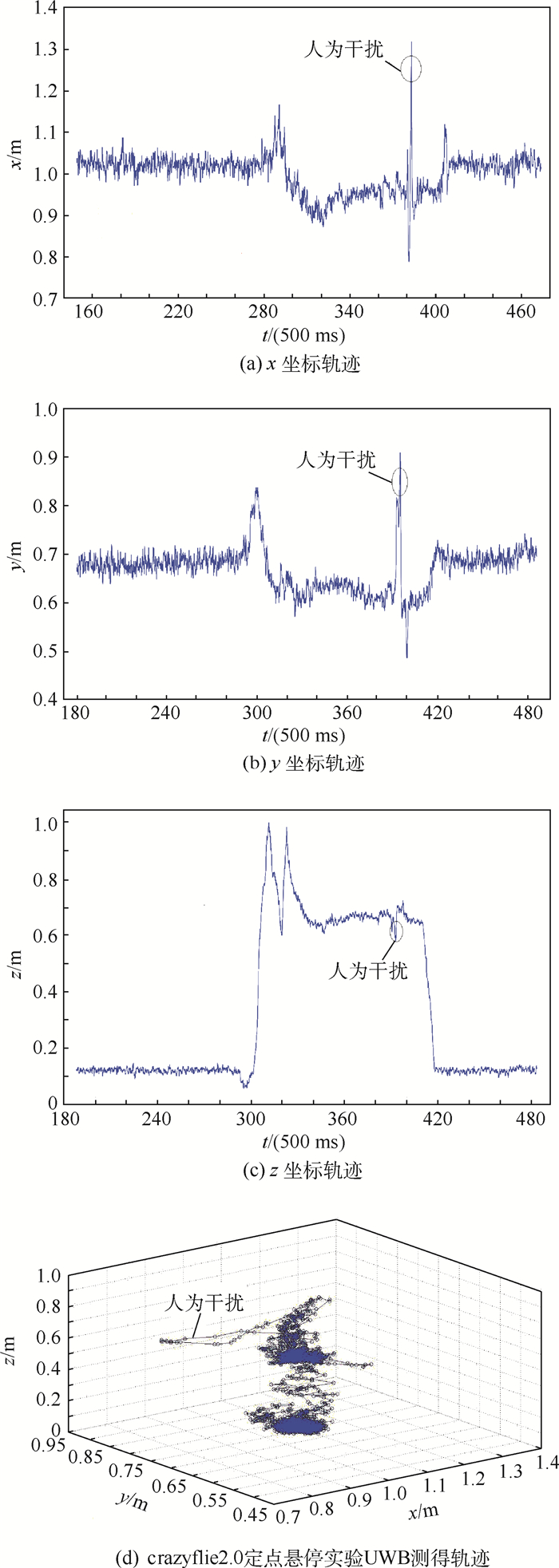
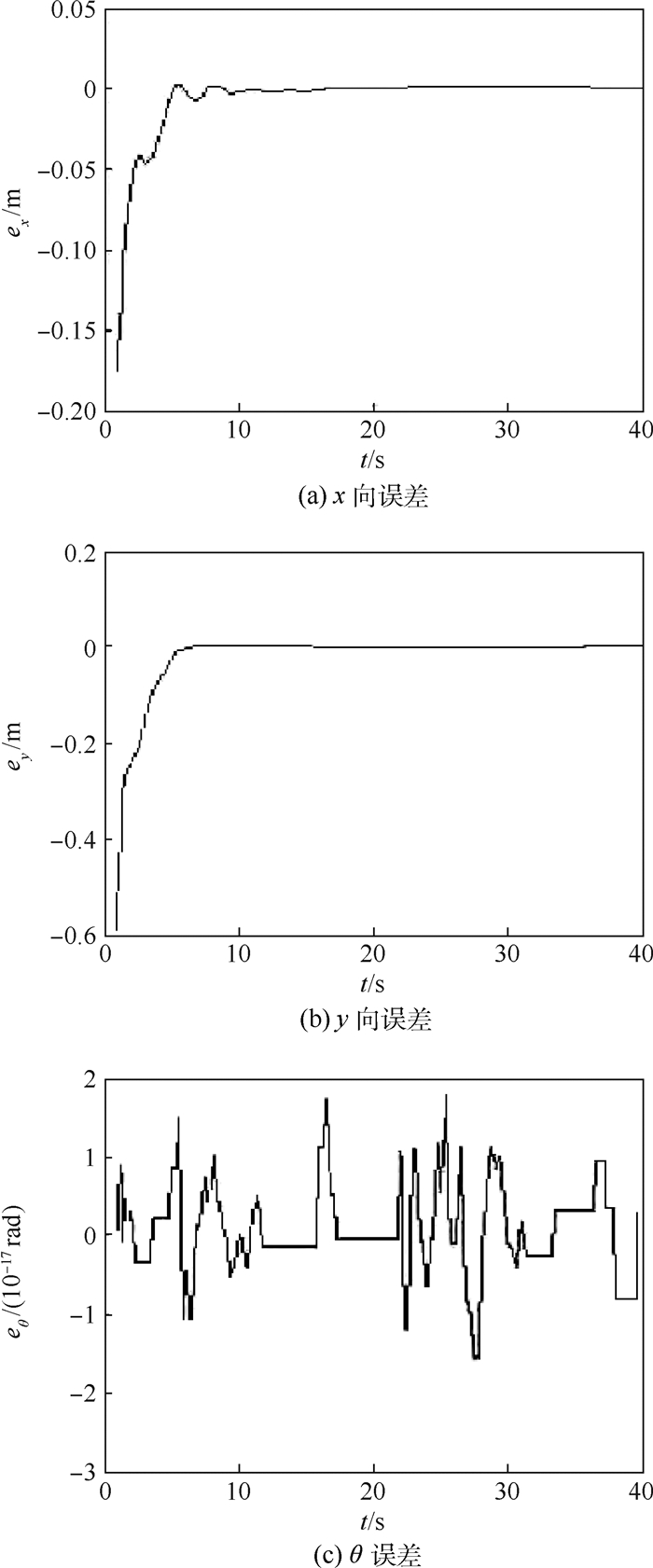
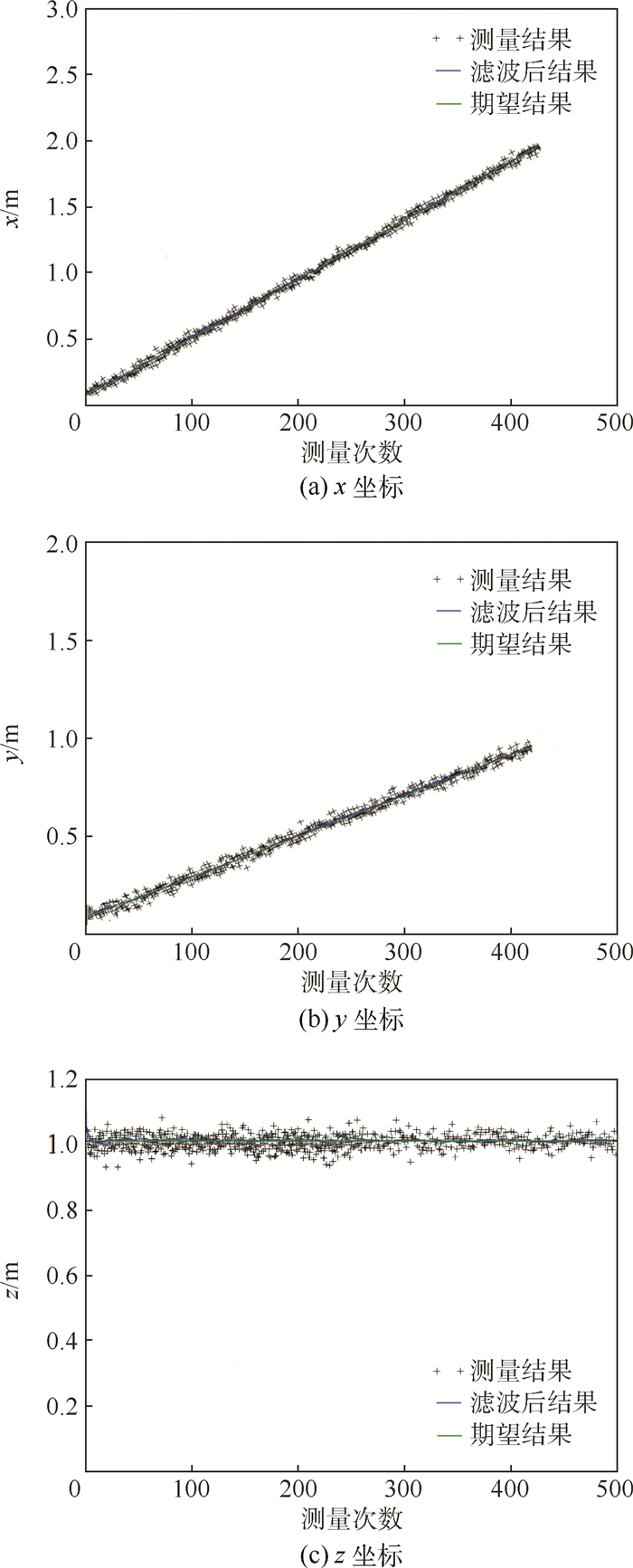
图 13 crazyflie2.0定点悬停UWB实测结果
Figure 13. Measured UWB results of crazyflie2.0 fixed point hovering
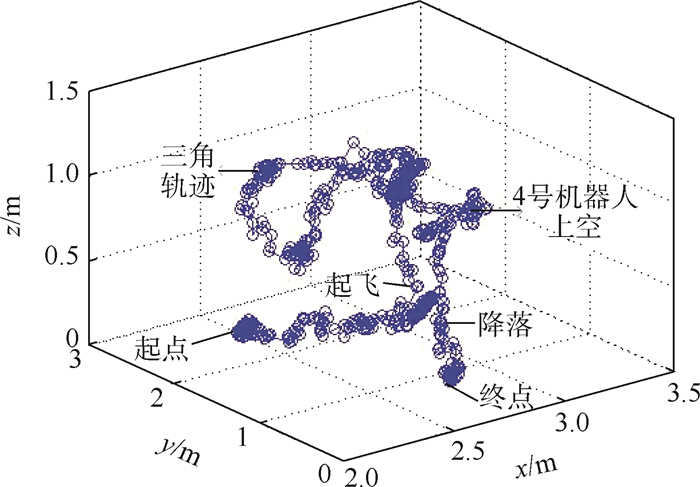
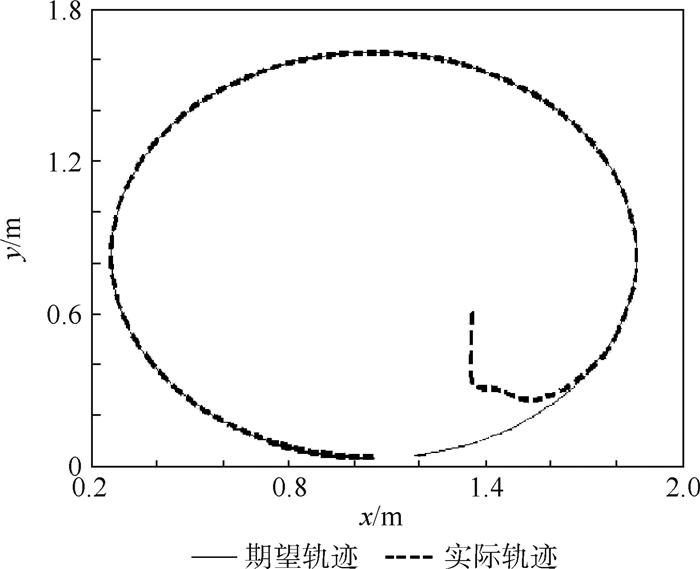
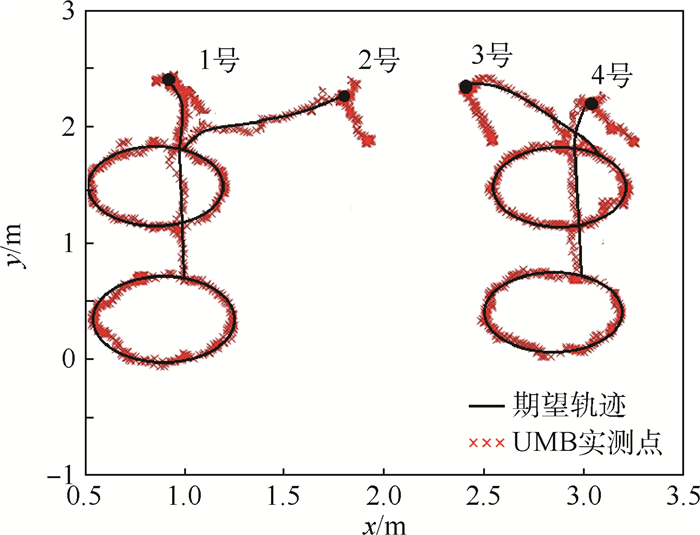
图 15 crazyflie2.0协同任务实验轨迹
Figure 15. Experimental trajectory of crazyflie2.0 collaborative task
-
[1] SUEOKA S, IRIE T.The study for control of the robot plane with GPS and IMU[J].Journal of Medical Virology, 2016, 13:417-418. [2] SASANI S, ASGARI J, AMIRI-SIMKOOEI A R.Improving MEMS-IMU/GPS integrated systems for land vehicle navigation applications[J].GPS Solutions, 2016, 20(1):89-100. doi: 10.1007/s10291-015-0471-3 [3] LI J, SONG N, YANG G, et al.Improving positioning accuracy of vehicular navigation system during GPS outages utilizing ensemble learning algorithm[J].Information Fusion, 2017, 35(C):1-10. [4] SAEEDI S, TRENTINI M, SETO M, et al.Multiple-robot simultaneous localization and mapping:A review[J].Journal of Field Robotics, 2016, 33(1):3-46. doi: 10.1002/rob.21620 [5] LOPEZ E, GARCIA S, BAREA R, et al.A multi-sensorial simultaneous localization and mapping (SLAM) system for low-cost micro aerial vehicles in GPS-denied environments[J].Sensors, 2017, 17(4):802. doi: 10.3390/s17040802 [6] AGHILI F, SU C Y.Robust relative navigation by integration of ICP and adaptive Kalman filter using laser scanner and IMU[J].IEEE/ASME Transactions on Mechatronics, 2016, 21(4):2015-2026. doi: 10.1109/TMECH.2016.2547905 [7] STACHNISS C, KRETZSCHMAR H. Pose graph compression for laser-based SLAM[M]//CHRISTENSEN H, KHATIB O. Robotics research. Berlin: Springer, 2017: 271-287. [8] ENDRES F, HESS J, STURM J, et al.3-D mapping with an RGB-D camera[J].IEEE Transactions on Robotics, 2017, 30(1):177-187. [9] GAO X, ZHANG T.Unsupervised learning to detect loops using deep neural networks for visual SLAM system[J].Autonomous Robots, 2017, 41(1):1-18. doi: 10.1007/s10514-015-9516-2 [10] CAO J, ZENG B, LIU J, et al.A novel relocation method for simultaneous localization and mapping based on deep learning algorithm[J].Computers & Electrical Engineering, 2017, 63(10):79-90. [11] ERYILDITIM A, GULDOGAN M B.A Bernoulli filter for extended target tracking using random matrices in an UWB sensor network[J].IEEE Sensors Journal, 2016, 16(11):4362-4373. doi: 10.1109/JSEN.2016.2544807 [12] crazyflie2. 0[EB/OL]. [2017-04-20]. [13] 张一淳, 张雪波, 方勇纯, 等.基于主动偏心轮的全方位移动机器人航位推算与跟踪控制[J].机器人, 2015, 37(3):361-368.ZHANG Y C, ZHANG X B, FANG Y C, et al.Dead reckoning and tracking control of omnidirectional mobile robots[J].Robot, 2015, 37(3):361-368(in Chinese). [14] MADHUSUDHAN M G.Control of crazyflie nano quadcopter using Simulink[M].Long Beach:California State University, 2016. [15] JAFAROV S M, ZEYNALOV E R, MUSTAFAYEVA A M.Synthesis of robust controller-regulators for omnidirectional mobile robot with irregular movement[J].Procedia Computer Science, 2016, 102:469-476. doi: 10.1016/j.procs.2016.09.429 [16] HAMMER F, YUDANTO R, KAI N, et al.Performance evaluation of 3D-position estimation systems[J].IEEE Sensors Journal, 2016, 16(16):6416-6424. doi: 10.1109/JSEN.2016.2581489 [17] 阴盼强, 路东明, 袁渊, 等.基于马氏距离的改进非局部均值图像去噪算法[J].计算机辅助设计与图形学学报, 2016, 28(3):404-410.YIN P Q, LU D M, YUAN Y, et al.An improved non-local means image de-noising algorithm using Mahalanobis distance[J].Journal of Computer-Aided Design & Computer Graphics, 2016, 28(3):404-410(in Chinese). [18] ROUSSEEUW P J, DRIESSEN K V.A fast algorithm for the minimum covariance determinant estimator[J].Technometrics, 1999, 41(3):212-223. doi: 10.1080/00401706.1999.10485670 期刊类型引用(12)
1. 李文锋,周敬龙,王其,蒋绍勇,贺利军. 超宽带信号的非视距识别与测距误差抑制. 控制与决策. 2024(08): 2605-2612 .  百度学术
百度学术2. 谢飞,周敬龙,李文锋,张强. 动态环境下UWB测距的NLOS影响分析与优化. 武汉理工大学学报. 2022(01): 80-87 . 百度学术3. 江渝川,何国斌. 基于红外视觉技术的机器人移动轨迹智能检测研究. 激光杂志. 2022(10): 184-187 . 百度学术4. 刘芬. 基于PLC的工业机器人轨迹跟踪自动化控制系统设计. 自动化与仪器仪表. 2021(07): 84-88 . 百度学术5. 朱天元,林艺旻. 虚拟现实和激光传感技术的机器人轨迹跟踪. 激光杂志. 2021(10): 157-161 . 百度学术6. 郭家伟,谈波,陈华,吴昊. 爬壁机器人底盘结构全向移动自主控制设计. 机械设计与制造. 2021(11): 158-161 . 百度学术7. 纪海宾,师彩云. 基于Origin的移动机器人测距传感器参数标定. 现代信息科技. 2020(09): 40-42+45 . 百度学术8. 谌稳帅,汪地,徐佳丽. 基于UWB的水果采摘跟随收集系统的设计. 工业控制计算机. 2020(11): 13-15+18 . 百度学术9. 代伟业,姜启龙,刘栋. 船舶导航机器移动轨迹的实时检测和跟踪研究. 舰船科学技术. 2020(22): 130-132 . 百度学术10. 卫恒,吕强,刘扬,林辉灿,梁冰. 基于状态切换的分布式多机器人编队控制. 兵工学报. 2019(05): 1103-1112 . 百度学术11. 徐庆坤,宋中越. 基于UWB的自主跟随机器人定位系统的设计. 计算机工程与设计. 2019(11): 3337-3341 . 百度学术12. 郑亚君,薛磊,董璐,王庆领. 基于UWB定位技术的多移动机器人编队控制. 智能科学与技术学报. 2019(01): 83-87 . 百度学术其他类型引用(11)
-

 下载:
下载:
 百度学术
百度学术
 点击查看大图
点击查看大图
计量
- 文章访问数: 718
- HTML全文浏览量: 134
- PDF下载量: 388
- 被引次数: 23
