



-
摘要:
随着机器人逐渐应用于生产生活的各个领域,安全性也成为了机器人研究的重要方向之一。根据安全性研究目标对象的不同,分别从机器人自身安全性和交互安全性两方面概述了国内外研究现状,分析了机械结构与控制算法对提高机器人安全性所起到的作用。在此基础上,分析了目前研究还存在结构设计过于传统、对突发情况判断能力较弱、复杂条件下控制柔顺性不足等问题,限制了机器人的推广应用。指出了机器人安全性的研究正向着刚柔混合一体化机构、准确快速的环境判断、良好的柔顺控制的方向发展。
Abstract:With the robot gradually used in many fields of production and life, safety has become one of the important research directions of robot. According to different research objects for robot safety, research status of robot safety at home and abroad is expounded from two parts, namely self-safety and interaction safety. The role of mechanical structure design and control algorithms in improving robot safety is analyzed. On this basis, the existing problems, such as too traditional structure design method, weak judgment of unexpected situation and lack of control compliance under complicated conditions, are analyzed, which limit the popularization and application of robots. The development trend of robot safety, such as rigid flexible hybrid mechanism, accurate and fast environment judgment and good compliance control, is proposed.
-
Key words:
- robot safety /
- self-safety /
- interaction safety /
- structure design /
- compliance control
-


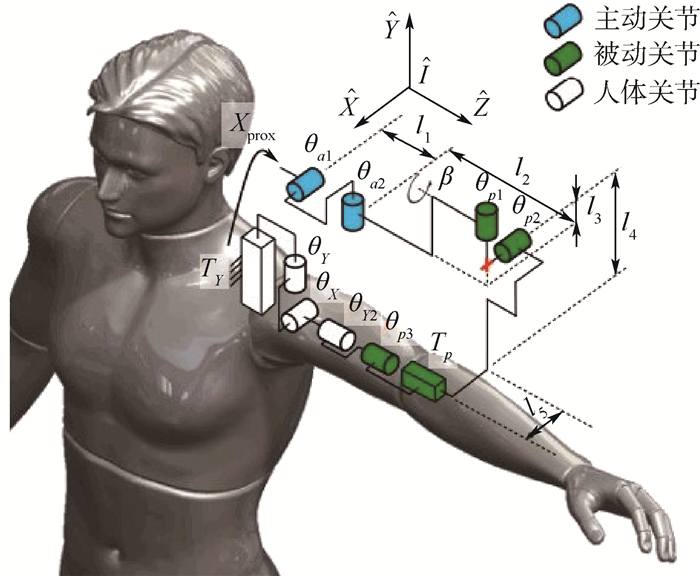
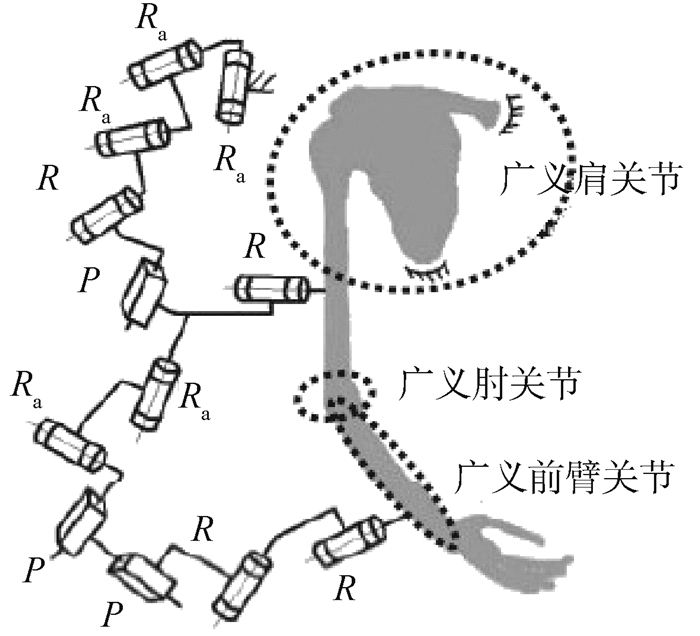
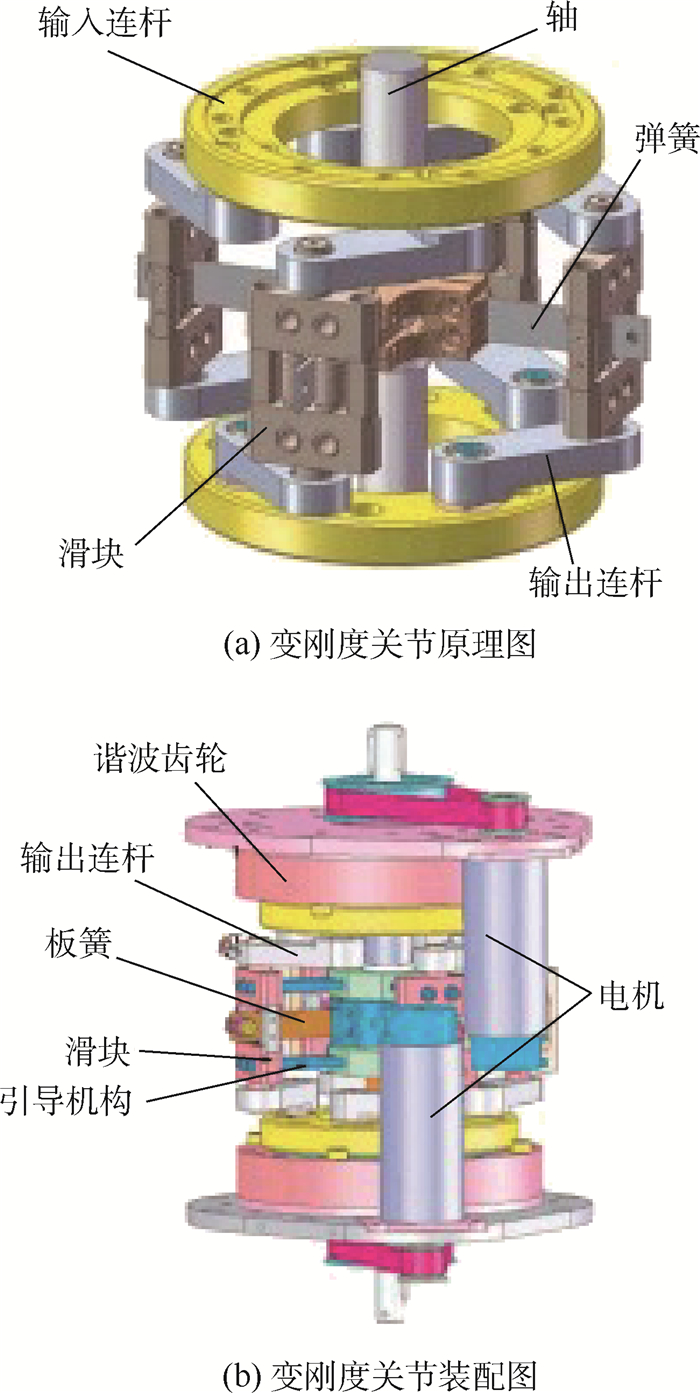
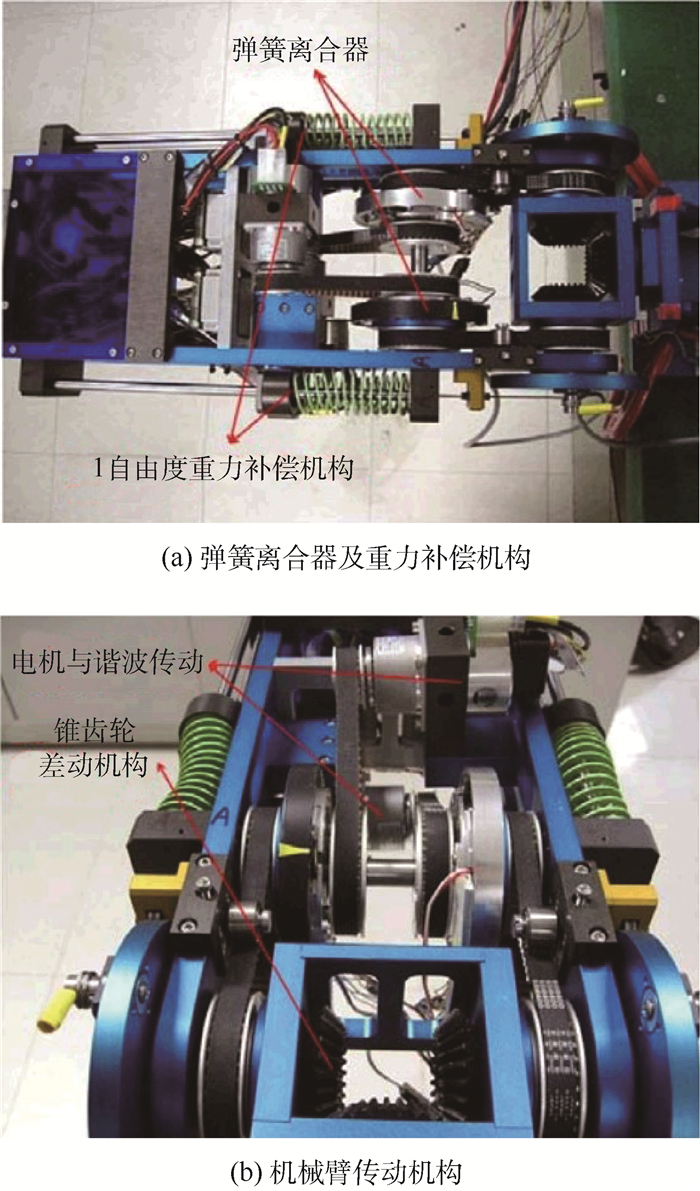
图 8 基于安全性的上肢外骨骼机构设计
Figure 8. Mechanism design of upper-limb exoskeleton based on safety

-
[1] GUIOCHET J, MACHIN M, WAESELYNCK H.Safety-critical advanced robots:A survey[J].Robotics & Autonomous Systems, 2017, 94:43-52. [2] 龚建伟, 陆际联, 高峻尧.移动机器人失控的安全防范[J].机器人, 2003, 25(4):300-303. https://www.cnki.com.cn/lunwen-1015443263.htmlGONG J W, LU J L, GAO J Y.Safe-runing area control for mobile robot[J].Robot, 2003, 25(4):300-303(in Chinese). https://www.cnki.com.cn/lunwen-1015443263.html [3] AVIZIENIS A, LAPRIE J C, RANDELL B, et al.Basic concepts and taxonomy of dependable and secure computing[J].IEEE Transactions on Dependable & Secure Computing, 2004, 1(1):11-33. [4] POLVERINI M P, ZANCHETTIN A M, ROCCO P.A computationally efficient safety assessment for collaborative robotics applications[J].Robotics and Computer-Integrated Manufacturing, 2017, 46:25-37. doi: 10.1016/j.rcim.2016.11.002 [5] HADDADIN S, HADDADIN S, KHOURY A, et al.On making robots understand safety:Embedding injury knowledge into control[J].International Journal of Robotics Research, 2012, 31(13):1578-1602. doi: 10.1177/0278364912462256 [6] 胡政.机器人安全性工程研究综述[J].中国机械工程, 2004, 15(4):90-95. http://www.cnki.com.cn/Article/CJFDTotal-JQRR200205019.htmHU Z.Review of robotic safety engineering[J].China Mechanical Engineering, 2004, 15(4):90-95(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-JQRR200205019.htm [7] 付乐, 武睿, 赵杰.协作机器人安全规范:ISO/TS 15066的演变与启示[J].机器人, 2017, 39(4):532-540.FU L, WU R, ZHAO J.The evolution and enlightenment of safety specification of cooperative robots:ISO/TS 15066[J].Robot, 2017, 39(4):532-540(in Chinese). [8] International Organization for Standardization. Robots and robotic devices-Safety requirements for industrial robots-Part 1: Robots: ISO 10218-1: 2011[S]. Geneva: ISO, 2011. [9] International Organization for Standardization. Robots and robotic devices-Safety requirements for industrial robots-Part 2: Robot systems and integration: ISO 10218-2: 2011[S]. Geneva: ISO, 2011. [10] International Organization for Standardization. Robots and robotic devices-Safety requirements for personal care robots: ISO 13482: 2014[S]. Geneva: ISO, 2014. [11] International Organization for Standardization. Robots and robotic devices-Collaborative robots: ISO 15066: 2016[S]. Geneva: ISO, 2016. [12] HARPER C, VIRK G.Towards the development of international safety standards for human robot interaction[J].International Journal of Social Robotics, 2010, 2(3):229-234. doi: 10.1007/s12369-010-0051-1 [13] 向以舟, 陈革, 丁立宇.机械产品的可靠性设计与试验[J].西南师范大学学报(自然科学版), 2008, 33(1):131-134. http://www.cqvip.com/QK/97674X/201515/665547032.htmlXIANG Y Z, CHEN G, DING L Y.Reliability design and tests of mechanical product[J].Journal of Southwest China Normal University(Natural Science Edition), 2008, 33(1):131-134(in Chinese). http://www.cqvip.com/QK/97674X/201515/665547032.html [14] YAMADA Y, YAMAMOTO T, MORIZONO T, et al. FTA-based issues on securing human safety in a human/robot coexistence system[C]//Proceedings of IEEE International Conference on Systems, Man, and Cybernetics. Piscataway, NJ: IEEE Press, 2002: 1058-1063. [15] 付煜茗. 机电设备可靠性理论研究与应用[D]. 北京: 北京邮电大学, 2014: 1-5.FU Y M. Research and application of reliability theory of electromechanical equipment[D]. Beijing: Beijing University of Posts and Telecommunications, 2014: 1-5(in Chinese). [16] 李锡江, 刘荣, 张厚祥, 等.基于模糊故障树法的清洗机器人安全性研究[J].北京航空航天大学学报, 2004, 30(4):344-348. http://bhxb.buaa.edu.cn/CN/abstract/abstract10196.shtmlLI X J, LIU R, ZHANG H X, et al.Fuzzy fault tree analysis on safety of robot for wall cleaning[J].Journal of Beijing University of Aeronautics and Astronutics, 2004, 30(4):344-348(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract10196.shtml [17] DHILLON B S, YANG N.Availability analysis of a robot with safety system[J].Microelectronics Reliability, 1996, 36(2):169-177. doi: 10.1016/0026-2714(95)00103-9 [18] DHILLON B S, FASHANDI A R M.Stochastic analysis of a robot machine with duplicate safety units[J].Journal of Quality in Maintenance Engineering, 1999, 5(2):114-127. doi: 10.1108/13552519910271810 [19] MAURTUA I, IBARGUREN A, KILDAL J, et al.Human-robot collaboration in industrial applications:Safety, interaction and trust[J].International Journal of Advanced Robotic Systems, 2017, 14(4):1-10. [20] FRYMAN J, MATTHIAS B. Safety of industrial robots: From conventional to collaborative applications[C]//Proceedings of 7th German Conference on Robotics. Piscataway, NJ: IEEE Press, 2012: 1-5. [21] 颜云辉, 徐靖, 陆志国, 等.仿人服务机器人发展与研究现状[J].机器人, 2017, 39(4):551-564. http://mall.cnki.net/magazine/Article/JXKX200504006.htmYAN Y H, XU J, LU Z G, et al.Development and research status of humanoid service robots[J].Robot, 2017, 39(4):551-564(in Chinese). http://mall.cnki.net/magazine/Article/JXKX200504006.htm [22] 王保国, 王新泉, 刘淑艳, 等.安全人机工程学[M].北京:机械工业出版社, 2007.WANG B G, WANG X Q, LIU S Y, et al.Safety ergonomics[M].Beijing:China Machine Press, 2007(in Chinese). [23] IKUTA K, NOKATA M. General evaluation method of safety for human-care robots[C]//Proceedings of IEEE International Conference on Robotics and Automation. Piscataway, NJ: IEEE Press, 1999: 2065-2072. [24] CHOI D, CHOI J, CHO C, et al.A safe robot arm with safe joints and gravity compensator[J].International Journal of Control Automation & Systems, 2013, 11(2):362-368. [25] 吕宁.一种医疗机器人安全性机构设计[J].科技展望, 2016(4):161. http://www.nsfc.gov.cn/publish/portal0/zdyjjh/2016/info52742.htmLV N.Design of a medical robot safety mechanism[J].Technology Outlook, 2016(4):161(in Chinese). http://www.nsfc.gov.cn/publish/portal0/zdyjjh/2016/info52742.htm [26] 徐丰羽, 王兴松, 许家林.缆索检测机器人安全回收机构设计与分析[J].机器人, 2008, 30(5):447-452. http://www.cqvip.com/qk/90837X/200303/7914337.htmlXU F Y, WANG X S, XU J L.Design and analysis of the safety reclaiming mechanism for a cable inspection robot[J].Robot, 2008, 30(5):447-452(in Chinese). http://www.cqvip.com/qk/90837X/200303/7914337.html [27] 熊根良, 陈海初, 梁发云, 等.物理性人-机器人交互研究与发展现状[J].光学精密工程, 2013, 21(2):356-370. http://cdmd.cnki.com.cn/Article/CDMD-10213-1014084911.htmXIONG G L, CHEN H C, LIANG F Y, et al.Research and development statue of physical human-robot interaction[J].Optics and Precision Engineering, 2013, 21(2):356-370(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10213-1014084911.htm [28] 褚卫中.功能安全技术讲座第二十五讲:功能安全产品设计及解决方案[J].仪器仪表标准化与计量, 2011(5):20-23. http://www.docin.com/p-1150622379.htmlCHU W Z.Functional safety technology lecture, Chapter 25:Design and solution of functional safety product[J].Instrument Standardization & Metrology, 2011(5):20-23(in Chinese). http://www.docin.com/p-1150622379.html [29] FRITZSCHE M, SCHULENBURG E, ELKMANN N, et al. Safe human-robot interaction in a life science environment[C]//Proceedings of IEEE International Workshop on Safety, Security and Rescue Robotics. Piscataway, NJ: IEEE Press, 2007: 1-6. [30] IKUTA K, ISHⅡ H, NOKATA M.Safety evaluation method of design and control for human-care robots[J].International Journal of Robotics Research, 2003, 22(5):281-298. doi: 10.1177/0278364903022005001 [31] 吴海彬, 杨剑鸣.机器人在人机交互过程中的安全性研究进展[J].中国安全科学学报, 2011, 21(11):79-86. doi: 10.3969/j.issn.1003-3033.2011.11.013WU H B, YANG J M.Progress in robot safety research during human-robot interaction[J].China Safety Science Journal, 2011, 21(11):79-86(in Chinese). doi: 10.3969/j.issn.1003-3033.2011.11.013 [32] LACEVIC B, ROCCO P. Kinetostatic danger field-A novel safety assessment for human-robot interaction[C]//Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, NJ: IEEE Press, 2010: 2169-2174. [33] LACEVIC B, ROCCO P, ZANCHETTIN A M.Safety assessment and control of robotic manipulators using danger field[J].IEEE Transactions on Robotics, 2013, 29(5):1257-1270. doi: 10.1109/TRO.2013.2271097 [34] SHAFER A S, KERMANI M R.On the feasibility and suitability of MR and ER based actuators in human friendly manipulators[J].IEEE/ASME Transactions on Mechatronics, 2011, 16(6):1073-1082. doi: 10.1109/TMECH.2010.2074210 [35] GECKS T, HENRICH D. Human-robot cooperation: Safe pick-and-place operations[C]//IEEE International Workshop on Robot and Human Interactive Communication. Piscataway, NJ: IEEE Press, 2005: 549-554. [36] PEDROCCHI N, VICENTINI F, MALOSIO M, et al.Safe human-robot cooperation in an industrial environment[J].International Journal of Advanced Robotic Systems, 2013, 10(1972):1-13. [37] POLVERINI M P, ZANCHETTIN A M, ROCCO P. Real-time collision avoidance in human-robot interaction based on kinetostatic safety field[C]//Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, NJ: IEEE Press, 2014: 4136-4141. [38] NAJMAEI N, KERMANI M R.Applications of artificial intelligence in safe human-robot interactions[J].IEEE Transactions on Systems Man & Cybernetics, Part B (Cybernetics), 2011, 41(2):448-459. [39] CALINON S, SARDELLITTI I, CALDWELL D G. Learning-based control strategy for safe human-robot interaction exploit-ing task and robot redundancies[C]//Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, NJ: IEEE Press, 2010: 249-254. [40] 祁若龙, 周维佳, 王铁军.一种基于遗传算法的空间机械臂避障轨迹规划方法[J].机器人, 2014, 36(3):263-270. https://www.researchgate.net/profile/Ruolong_Qi/publication/289735170_An_obstacle_avoidance_trajectory_planning_scheme_for_space_manipulators_based_on_genetic_algorithm/links/56b05e4f08ae9c1968b4f461.pdf?origin=publication_detailQI R L, ZHOU W J, WANG T J.An obstacle avoidance trajectory planning scheme for space manipulators based on genetic algorithm[J].Robot, 2014, 36(3):263-270(in Chinese). https://www.researchgate.net/profile/Ruolong_Qi/publication/289735170_An_obstacle_avoidance_trajectory_planning_scheme_for_space_manipulators_based_on_genetic_algorithm/links/56b05e4f08ae9c1968b4f461.pdf?origin=publication_detail [41] LO S Y, CHENG C A, HUANG H P.Virtual impedance control for safe human-robot interaction[J].Journal of Intelligent & Robotic Systems, 2016, 82(1):3-19. [42] 倪杭, 王贺升, 陈卫东.基于软体机器人冗余自由度的实时避障位置控制[J].机器人, 2017, 39(3):265-271. http://mall.cnki.net/magazine/magadetail/JQRR201703.htmNI H, WANG H S, CHEN W D.Real-time obstacle avoidance and position control for a soft robot based on its redundant freedom[J].Robot, 2017, 39(3):265-271(in Chinese). http://mall.cnki.net/magazine/magadetail/JQRR201703.htm [43] 申浩宇, 吴洪涛, 陈柏, 等.冗余度双臂机器人协调避障算法[J].农业机械学报, 2015, 46(9):356-361. doi: 10.6041/j.issn.1000-1298.2015.09.052SHEN H Y, WU H T, CHEN B, et al.Obstacle avoidance algorithm for coordinated motion of redundant dual-arm robot[J].Journal of Agricultural Machinery, 2015, 46(9):356-361(in Chinese). doi: 10.6041/j.issn.1000-1298.2015.09.052 [44] DMITRY B, HOWIE C, JAMES K. An optimization approach to planning for mobile manipulation[C]//Proceedings of IEEE International Conference on Robotics and Automation(ICRA). Piscataway, NJ: IEEE Press, 2008: 1187-1192. [45] MOHAMED A Z, SANG H, HUNG Y. Autonomous mobile robot system concept based on PSO path planner and vSLAM[C]//Proceedings of IEEE Computer Science and Automation Engineering(CSAE). Piscataway, NJ: IEEE Press, 2011: 10-12. [46] MEDDAHI A, CHELLALI R, BAIZID K. Multi-objective control through evolutionary neuro-controller for interactive mobile robot manipulator[C]//Proceedings of IEEE International Conference on Robotics and Biomimetics. Piscataway, NJ: IEEE Press, 2011: 2914-2918. [47] STACHNISS C, HAHNEL D, BURGARD W. Exploration with active loop-closing for FastSLAM[C]//Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, NJ: IEEE Press, 2005: 1505-1510. [48] MEDDAHI A, CHELLALI R. Adaptive and safe mobile manipulator for human robot interaction[C]//Proceedings of 2013 IEEE Workshop on Robotic Intelligence in Informationally Structured Space. Piscataway, NJ: IEEE Press, 2013: 30-37. [49] DU J, ZHENG P, XIE Z, et al. Research on path planning algorithm based on security patrol robot[C]//Proceedings of 2016 IEEE International Conference on Mechatronics and Automation. Piscataway, NJ: IEEE Press, 2016: 1030-1035. [50] 钱钧, 杨汝清, 翁新华, 等.一种安全工作于城区环境的消防侦察机器人[J].机器人, 2006, 28(6):571-575. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jqr200606004QIAN J, YANG R Q, WENG X H, et al.A fire reconnaissance robot working safely in urban environments[J].Robot, 2006, 28(6):571-575(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jqr200606004 [51] 韩赞东, 陈强, 尉昊赟.超声定位技术在汽车安全预警系统中的应用[J].测控技术, 2002, 21(8):10-12. http://cdmd.cnki.com.cn/Article/CDMD-10183-2007018949.htmHAN Z D, CHEN Q, WEI H Y.Application of ultrasonic detection technology in safety early warning system of automobile[J].Measurement and Control Technology, 2002, 21(8):10-12(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10183-2007018949.htm [52] QUAN Y, ZHANG Y, HAO W, et al. Application of fuzzy algorithm in the direction of intelligent car[C]//Proceedings of International Conference on Future Computer and Communication. Piscataway, NJ: IEEE Press, 2010: 669-673. [53] WANG X, SHEN X, CHANG X, et al. Route identification and direction control of smart car based on CMOS image sensor[C]//Proceedings of ISECS International Colloquium on Computing, Communication, Control, and Management. Piscataway, NJ: IEEE Press, 2008: 176-179. [54] 邹青华. 基于多传感器的移动机器人避障[D]. 杭州: 浙江工业大学, 2011: 26-30.ZOU Q H. Obstacle avoidance of mobile robot based on multi-sensor[D]. Hangzhou: Zhejiang University of Technology, 2011: 26-30(in Chinese). [55] 刘喜昂, 周志宇.基于多超声传感器的机器人安全避障技术[J].测控技术, 2004, 23(3):71-73. http://www.cqvip.com/Main/Detail.aspx?id=21124855LIU X A, ZHOU Z Y.Technology of robot's safe obstacle avoidance based on multi-ultrasonic sensor[J].Measurement and Control Technology, 2004, 23(3):71-73(in Chinese). http://www.cqvip.com/Main/Detail.aspx?id=21124855 [56] ULRICH R, CHRISTIAN C, JAN F, et al. Care-O-bot 3-Creating a product vision for service robot applications by integrating design and technology[C]//Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, NJ: IEEE Press, 2009: 1992-1998. [57] 周延霞, 吴玉香, 胡跃明.非完整移动机械臂的避障运动规划[J].微计算机信息, 2007, 23(35):234-236. doi: 10.3969/j.issn.1008-0570.2007.35.095ZHOU Y X, WU Y X, HU Y M.Motion planning and obstacle avoidance of nonholonomic mobile manipulators[J].Microcomputer Information, 2007, 23(35):234-236(in Chinese). doi: 10.3969/j.issn.1008-0570.2007.35.095 [58] SCHMIDT D, BERNS K. Safe navigation of a wall-climbing robot by methods of risk prediction and suitable counteractive measures[C]//Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, NJ: IEEE Press, 2013: 2309-2314. [59] 王太勇, 许爱芬, 赵丽, 等.基于冗余控制理论的壁面机器人真空系统的安全性[J].天津大学学报, 2008, 41(3):261-266. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=tianjdxxb200803002WNAG T Y, XU A F, ZHAO L, et al.Safety of wall robot's vacuum system based on redundant control theory[J].Journal of Tianjin University, 2008, 41(3):261-266(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=tianjdxxb200803002 [60] LI J F, ZHANG Z, TAO C, et al.Structure design of lower limb exoskeletons for gait training[J].Chinese Journal of Mechanical Engineering, 2015, 28(5):878-887. doi: 10.3901/CJME.2015.0525.075 [61] DEHEZ B, SAPIN J, SHOULDE R O. An alignment-free two-DOF rehabilitation robot for the shoulder complex[C]//Proceedings of IEEE International Conference on Rehabilitation Robotics(ICORR). Piscataway, NJ: IEEE Press, 2011: 1-6. [62] GALINSKI D, SAPIN J, DEHEZ B. Optimal design of an alignment-free two-DOF rehabilitation robot for the shoulder complex[C]//Proceedings of IEEE International Conference on Rehabilitation Robotics(ICORR). Piscataway, NJ: IEEE Press, 2013: 1-7. [63] LI J F, ZHANG Z, TAO C, et al.A number synthesis method of the self-adapting upper-limb rehabilitation exoskeletons[J].International Journal of Advanced Robotic Systems, 2017, 14(3):1-14. [64] POLYGERINOS P, LYNE S, WANG Z, et al. Towards a soft pneumatic glove for hand rehabilitation[C]//Proceedings of 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway, NJ: IEEE Press, 2013: 1512-1517. [65] POLYGERINOS P, GALLOWAY K C, SAVAGE E, et al. Soft robotic glove for hand rehabilitation and task specific training[C]//Proceedings of IEEE International Conference on Robotics and Automation. Piscataway, NJ: IEEE Press, 2015: 2913-2919. [66] HONG K Y, LIM J H, NASRALLAH F, et al. A soft exoskeleton for hand assistive and rehabilitation application using pneumatic actuators with variable stiffness[C]//IEEE International Conference on Robotics and Automation. Piscataway, NJ: IEEE Press, 2015: 4967-4972. [67] ZINN M, KHATIB O, ROTH B. A new actuation approach for human friendly robot design[C]//IEEE International Conference on Robotics and Automation. Piscataway, NJ: IEEE Press, 2004: 249-254. [68] BICCHI A, TONIETTI G.Fast and soft arm tactics[J].IEEE Robotics & Automation Magazine, 2004, 11(2):22-23. [69] WOLF S, HIRZINGER G. A new variable stiffness design: Matching requirements of the next robot generation[C]//IEEE International Conference on Robotics and Automation. Piscataway, NJ: IEEE Press, 2008: 1741-1746. [70] MORITA T, SUGANO S. Development of 4-DOF manipulator using mechanical impedance adjuster[C]//IEEE International Conference on Robotics and Automation. Piscataway, NJ: IEEE Press, 1996: 2902-2907. [71] PRATT G A, WILLIAMSON M M. Series elastic actuator[C]//Proceedings of the IEEE/RSJ Conference on Intelligent Systems and Robots. Piscataway, NJ: IEEE Press, 1995: 399-406. [72] SIEGEL D, GARABIETA I, HOLLERBACH J M. An integrated tactile and thermal sensor[C]//IEEE International Conference on Robotics and Automation. Piscataway, NJ: IEEE Press, 1986: 1286-1291. [73] MASON M T, SALISBURY J K.Kinematic and force analysis of articulated hands:Robot hands and the mechanics of manipulation[M].Cambridge:MIT Press, 1988:2-167. [74] SUSANNER O, ROLF D S. Robot-dummy crash test for robot safety assessment[C]//IEEE International Conference on Robotics and Automation. Piscataway, NJ: IEEE Press, 2007: 2934-2939. [75] KULIC D, CROFT E A. Safe planning for human-robot interaction[C]//Proceedings of IEEE International Conference on Robotics and Automation. Piscataway, NJ: IEEE Press, 2005: 1882-1887. [76] KULIC D, CROFT E A.Real-time safety for human-robot interaction[J].Robotics & Autonomous Systems, 2006, 54(1):1-12. [77] 吴海彬, 彭爱泉, 何素梅.基于危险指数最小化的机器人安全运动规划[J].机械工程学报, 2015, 51(9):18-27. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxgcxb201509003WU H B, PENG A Q, HE S M.Robot safe motion planning based on minimized danger index[J].Journal of Mechanical Engineering, 2015, 51(9):18-27(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxgcxb201509003 [78] LIU H, DENG X, ZHA H. A planning method for safe interaction between human arms and robot manipulators[C]//Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, NJ: IEEE Press, 2005: 2724-2730. [79] OH S, WOO H, KONG K.Frequency-shaped impedance control for safe human-robot interaction in reference tracking application[J].IEEE/ASME Transactions on Mechatronics, 2014, 19(6):1907-1916. doi: 10.1109/TMECH.2014.2309118 [80] SHARIFI I, DOUSTMOHAMMADI A, TALEBI H A. A singularity-free approach for safe interaction of robot assisted rehabi-litation, based on model-free impedance control[C]//Proceedings of International Conference on Control, Instrumentation, and Automation. Piscataway, NJ: IEEE Press, 2013: 36-41. [81] 杨智勇, 方登建, 张静.变刚度柔顺驱动器及其在能量辅助骨骼服中的应用[J].海军航空工程学院学报, 2013, 28(5):459-465. doi: 10.7682/j.issn.1673-1522.2013.05.001YANG Z Y, FANG D J, ZHANG J.Variable stiffness compliant actuator and its application in energy subsidy exoskeleton suit[J].Journal of Naval Aeronautical and Astronautical, 2013, 28(5):459-465(in Chinese). doi: 10.7682/j.issn.1673-1522.2013.05.001 [82] HAM R V, SUGAR T G, VANDERBORGHT B, et al.Compliant actuator designs[J].IEEE Robotics & Automation Magazine, 2009, 16(3):81-94. [83] HURST J W, CHESTNUTT J E, RIZZI A A.The actuator with mechanically adjustable series compliance[J].IEEE Transactions on Robotics, 2004, 26(4):597-606. [84] JAFARI A, TSAGARAKIS N G, SARDELLITTI I, et al.A new actuator with adjustable stiffness based on a variable ratio lever mechanism[J].IEEE/ASME Transactions on Mechatronics, 2014, 19(1):55-63. doi: 10.1109/TMECH.2012.2218615 [85] JAFARI A, TSAGARAKIS N G, VANDERBORGHT B, et al. A novel actuator with adjustable stiffness(AwAS)[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, NJ: IEEE Press, 2010: 4201-4206. [86] SERGI F, ACCOTO D, CARPINO G, et al. Design and characterization of a compact rotary series elastic actuator for knee assistance during overground walking[C]//Proceedings of the Fourth IEEE RAS/EMBS International Conference on Biome-dical Robotics and Biomechatronics. Piscataway, NJ: IEEE Press, 2012: 1931-1936. [87] LAFFRANCHI M, CHEN L, KASHIRI N, et al.Development and control of a series elastic actuator equipped with a semi active friction damper for human friendly robots[J].Robotics & Autonomous Systems, 2014, 62(12):1827-1836. [88] KONG K, BAE J, TOMIZUKA M.Control of rotary series elastic actuator for ideal force-mode actuation in human-robot interaction applications[J].IEEE/ASME Transactions on Mechatronics, 2009, 14(1):105-118. doi: 10.1109/TMECH.2008.2004561 [89] KONG K, BAE J, TOMIZUKA M.A compact rotary series elastic actuator for human assistive systems[J].IEEE/ASME Transactions on Mechatronics, 2012, 17(2):288-297. doi: 10.1109/TMECH.2010.2100046 [90] TONIETTI G, SCHIAVI R, BICCHI A. Design and control of a variable stiffness actuator for safe and fast physical human/robot interaction[C]//Proceedings of IEEE International Conference on Robotics and Automation. Piscataway, NJ: IEEE Press, 2005: 526-531. [91] BAE J, KONG K, TOMIZUKA M.Gait phase-based control for a rotary series elastic actuator assisting the knee joint[J].Journal of Medical Devices, 2011, 5(3):031010. doi: 10.1115/1.4004793 [92] CHOI J, HONG S, LEE W, et al.A robot joint with variable stiffness using leaf springs[J].IEEE Transactions on Robotics, 2011, 27(2):229-238. doi: 10.1109/TRO.2010.2100450 [93] PAINE N, OH S, SENTIS L.Design and control considerations for high-performance series elastic actuators[J].IEEE/ASME Transactions on Mechatronics, 2014, 19(3):1080-1091. doi: 10.1109/TMECH.2013.2270435 [94] TSAGARAKIS N G, LAFFRANCHI M, VANDERBORGHT B, et al. A compact soft actuator unit for small scale human friendly robots[C]//Proceedings of IEEE International Conference on Robotics and Automation. Piscataway, NJ: IEEE Press, 2009: 1998-2004. -

 下载:
下载:









 点击查看大图
点击查看大图
计量
- 文章访问数: 1500
- HTML全文浏览量: 324
- PDF下载量: 1062
- 被引次数: 0
