



-
摘要:
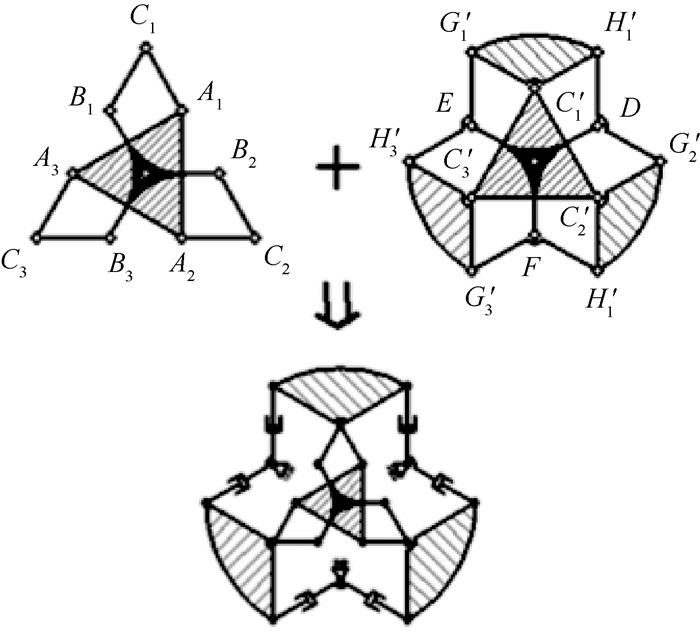
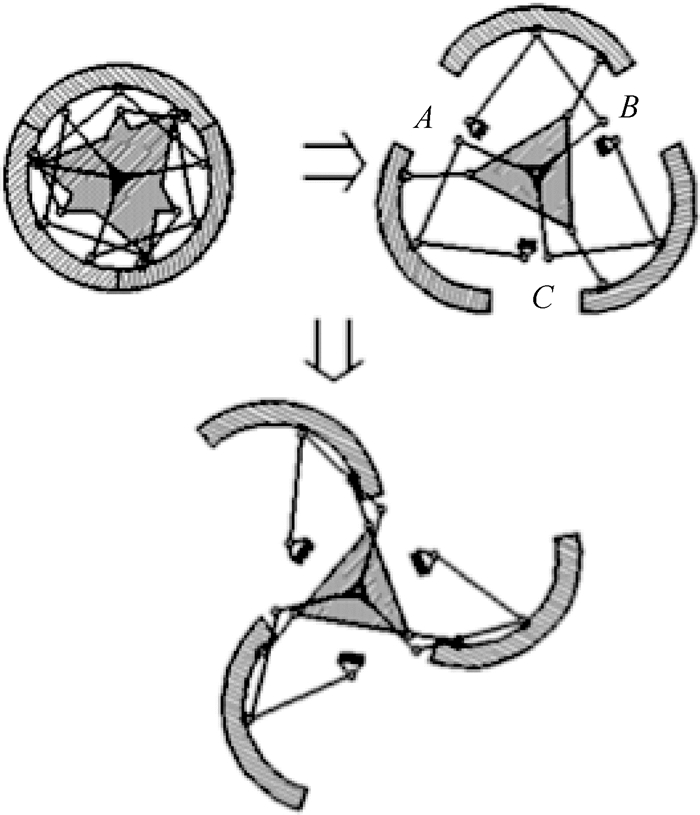
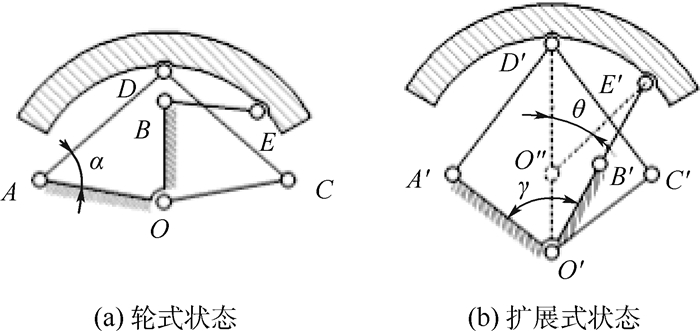
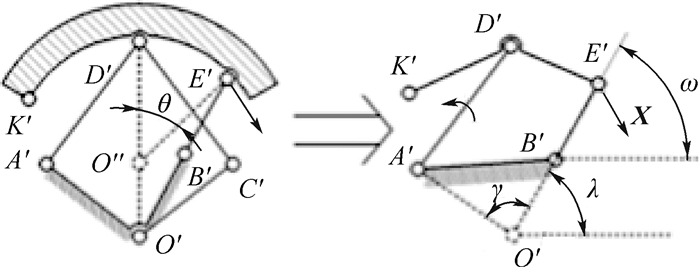
变形车轮是提升轮式移动机器人在严苛地形越障能力的有效方案。然而传统单构型变形轮仅能适应特定路面环境,不能同时满足多种路面环境。利用一种平面多边形机构,将已有研究的轮式、扩展式和轮腿式构型相结合,提出了4种多段变形轮机构。同时,比较各构型的优缺点并针对较优方案进行杆长优化,提出相应的设计方法。根据不同路面情况,通过轮形间的有效切换,使得轮式移动机构在越障能力得到提升的同时,还能保证机构对不同种类地形的适应能力,达到提升机构通用性的目的。
Abstract:The transformable wheel is an effective way to enhance the wheeled mobile robots' obstacle navigation ability in harsh terrain. However, traditional single-structure transformable wheels can only adapt to specific environment and unable to simultaneously satisfy the environments with varieties of harsh terrain. The four kinds of multistage transformable wheel were proposed, which combined a kind of planar polygon with round wheel type, expended wheel type and wheel-leg type structure. At the same time, four different structures' advantage and disadvantages were compared. Giving out the corresponding design method, the length of the linkage was also optimized to propose a better solution. Through the effective shifting between the structures depending on different terrain, wheeled mobile robots' obstacle navigation ability were improved while also the adaptability of different terrains were enhanced to broaden the versatility of the mechanism.
-
[1] 徐国华, 谭民.移动机器人的发展现状及其趋势[J].机器人技术与应用, 2001(3):7-14. doi: 10.3969/j.issn.1004-6437.2001.03.003XU G H, TAN M.The current situation and tendency of mobile robots[J].Robot Technique and Application, 2001(3):7-14(in Chinese). doi: 10.3969/j.issn.1004-6437.2001.03.003 [2] 江海波, 潘存云.基于行星轮系的移动机器人及其特性分析[J].机械制造, 2005, 43(12):11-13. doi: 10.3969/j.issn.1000-4998.2005.12.003JIANG H B, PAN C Y.Analysis of mobile robot based on planetary gear train and its characteristics[J].Machinery, 2005, 43(12):11-13(in Chinese). doi: 10.3969/j.issn.1000-4998.2005.12.003 [3] 李水良, 魏道付, 高峰, 等.步行轮机构及运动控制方案[J].洛阳工学院学报, 1995, 16(1):63-68.LI S L, WEI D F, GAO F, et al.The mechanisms and motion control of the terrain-adaptive walking wheel[J].Journal of Luoyang Institute of Technology, 1995, 16(1):63-68(in Chinese). [4] 邓宗全, 高海波, 胡明, 等.行星越障轮式月球车的设计[J].哈尔滨工业大学学报, 2003, 35(2):203-206. doi: 10.3321/j.issn:0367-6234.2003.02.018DENG Z Q, GAO H B, HU M, et al.Design of lunar rover with planetary wheel for surmount obstacle[J].Journal of Harbin Institute of Technology, 2003, 35(2):203-206(in Chinese). doi: 10.3321/j.issn:0367-6234.2003.02.018 [5] 岳荣刚, 王少萍, 焦宗夏, 等.一种新型轮爪式车轮设计与性能仿真[J].北京航空航天大学学报, 2007, 33(12):1408-1411. doi: 10.3969/j.issn.1001-5965.2007.12.007YUE R G, WANG S P, JIAO Z X, et al.Design and performance simulation of a new type wheel with claws[J].Journal of Beijing University of Aeronautics and Astronautics, 2007, 33(12):1408-1411(in Chinese). doi: 10.3969/j.issn.1001-5965.2007.12.007 [6] HORCHLER A D, QUINN R D, LAMBRECHT B, et al. Highly mobile robots that run and jump: US7249640[P]. 2007-07-31. [7] 葛耿育. 基于异形轮组合的小型机器人越障性能研究[D]. 重庆: 西南大学, 2014.GE G Y. Research on obstacle properties of smallrobot based on abnormal wheels[D]. Chongqing: Southwest University, 2014(in Chinese). [8] 陈德兴, 陈秉聪, 张书军.步行轮机构原理[J].农业工程学报, 1994, 10(2):123-129.CHEN D X, CHEN B C, ZHANG S J.The principle of walking wheel mechanism[J].Transactions of the Chinese Society of Agricultural Engineering, 1994, 10(2):123-129(in Chinese). [9] JONES J A. Inflatable robotics for planetary applications[C]//Proceedings of 6th International Symposium on Artificial Intelligence, Robotics, and Automation in Space: A New Space Odyssey. Pasadena: Jet Propulsion Laboratory, NASA, 2001: 1-6. [10] GRAND C, BIDAUD P, JARRASS É N. Innovative concept of unfoldable wheel with an active contact adaptation mechanism[C]//Proceedings of 12th World Congress in Mechanism and Machine Science(IFToMM), 2007: 1225-1232. [11] 孙鹏, 高峰, 李雯, 等.深空探测车可变直径车轮牵引通过性分析[J].北京航空航天大学学报, 2007, 33(12):1404-1407. doi: 10.3969/j.issn.1001-5965.2007.12.006SUN P, GAO F, LI W, et al.Analysis of traction traffic ability of diameter variable wheel for planetary rover[J].Journal of Beijing University of Aeronautics and Astronautics, 2007, 33(12):1404-1407(in Chinese). doi: 10.3969/j.issn.1001-5965.2007.12.006 [12] 孙刚, 高峰, 孙鹏.可变直径轮月球探测车及其越障能力分析[J].机械设计, 2008, 25(5):21-23.SUN G, GAO F, SUN P.Moon detection with diameter variable wheels and its obstacle surmounting capability analysis[J].Journal of Machine Design, 2008, 25(5):21-23(in Chinese). [13] GOSSELIN C M, GAGNON-LACHANCE D.Expandable polyhedral mechanisms based on polygonal one-degree-of-freedom faces[J].Proceedings of the Institution of Mechanical Engineers, Part C:Journal of Mechanical Engineering Science, 2006, 220(7):1011-1018. doi: 10.1243/09544062JMES174 [14] 杨春. 基于变形车轮的移动机构研究[D]. 北京: 北京交通大学, 2010.YANG C. The research of mobile mechanism based on transformable wheels[D]. Beijing: Beijing Jiaotong University, 2010(in Chinese). [15] 解晓琳, 高峰.适用于松软地面的可变形轮牵引特性分析[J].农业机械学报, 2016, 47(s1):457-463.XIE X L, GAO F.Tractive performance analysis of transformable wheel on soft terrain[J].Transactions of the Chinese Society of Agricultural Machinery, 2016, 47(s1):457-463(in Chinese). 期刊类型引用(2)
1. 张铂轩,王立超,袁泽浩,孙术发,王扬威. 面向林地作业的腿履复合移动机器人构型设计与越障策略研究. 机床与液压. 2024(03): 37-43 .  百度学术
百度学术2. 邢彪,徐广健,倪利伟,吴量,马芳武. 全地形车轮腿结构研究综述. 汽车文摘. 2020(07): 27-33 . 百度学术其他类型引用(10)
-

 下载:
下载:







 百度学术
百度学术
 点击查看大图
点击查看大图

计量
- 文章访问数: 1062
- HTML全文浏览量: 173
- PDF下载量: 580
- 被引次数: 12
