



-
摘要:
为了解决铁路火车等结构单一环境的三维重建问题,提出了置信度的概念,将TOF系统与双目系统的互补性特点有效结合。通过联合标定,建立起TOF系统与双目系统的坐标关系,将TOF中的点映射到左相机视角下,得出双目系统左相机视角下的TOF测量视差图,再利用图像分割以及曲面拟合对其上采样处理至双目图像的分辨率大小。根据各系统特点定义置信度,确定数据融合的不同系统权重。利用Middlebury的数据集处理结果,融合后的匹配精度较双目系统精度提高一倍以上,且视差图的分辨率提升至与双目系统相同大小。
Abstract:To solve the problem of 3D reconstruction in textureless environment like railway, the confidence coefficient is proposed to combine TOF and stereo vision system effectively. Through the joint calibration, the coordinate relationship between TOF and stereo vision systems is established. Then by projecting the points in TOF to left camera in stereo vision system, the disparity map of TOF is obtained. After image segment and surface fitting the disparity map is up-sampled and its resolution is equal to that of stereo images. According to the confidence coefficients of different systems, the system weight values of data fusion are defined. Finally, the proposed method is evaluated with Middlebury dataset, and the results show that the accuracy has been raised twofold or more, and the resolution of disparity map is equal to that of stereo images as well.
-
Key words:
- stereo vision /
- TOF /
- data upsampling /
- data fusion /
- confidence coefficient
-
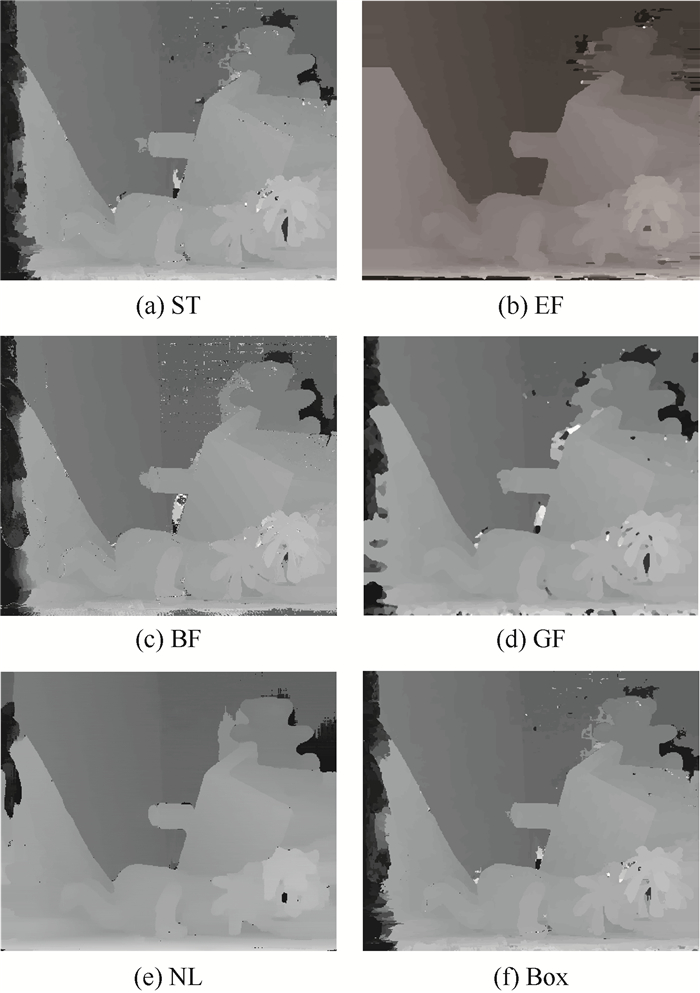
图 2 不同代价聚合算法的视差图对比
Figure 2. Comparison of disparity maps generated by different cost aggregation algorithms
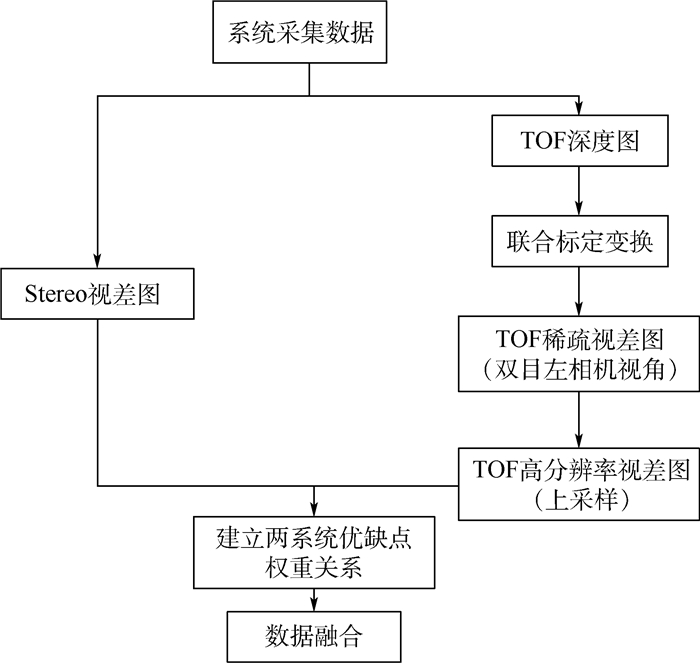
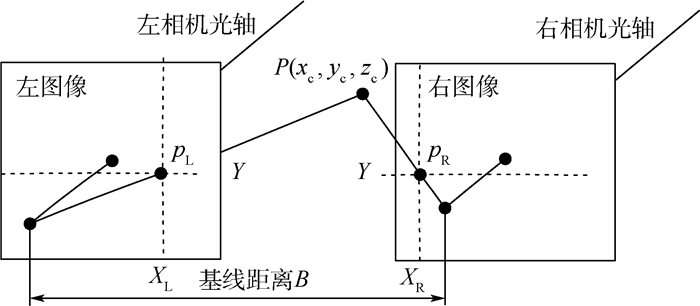
图 3 TOF与双目系统数据融合示意图
Figure 3. Schematic diagram of data fusion of TOF and stereo vision system
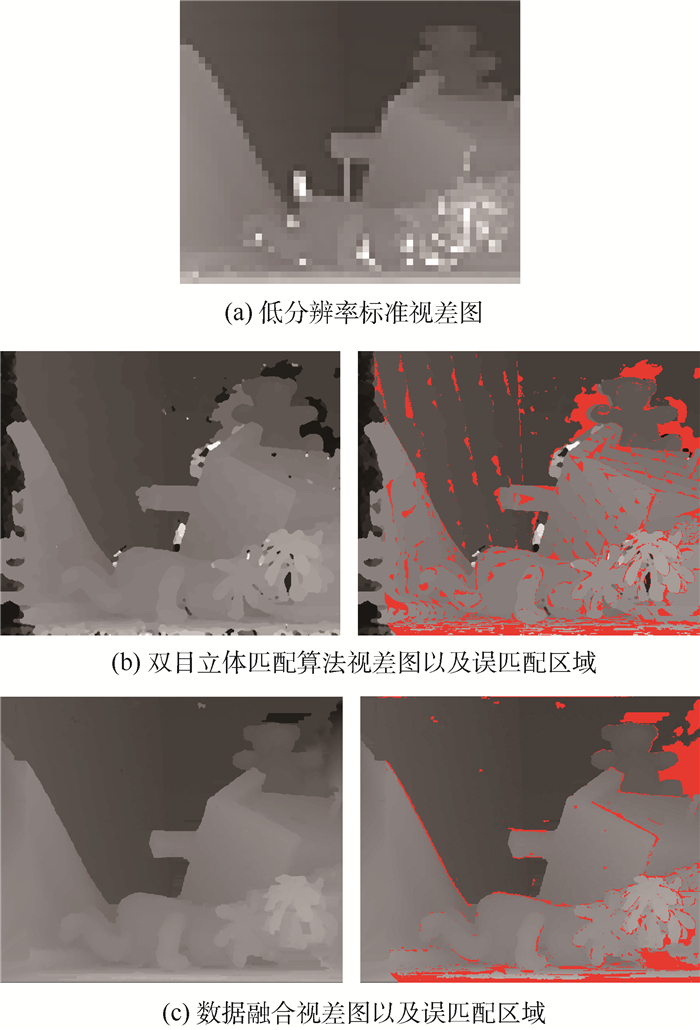
表 1 双目立体匹配和融合算法结果分析
Table 1. Analysis of stereo vision and fusion algorithm results
% 图像 双目立体匹配算法误匹配率 融合算法误匹配率 Teddy 13.34 6.34 Cones 8.56 4.63 Tsukuba 6.52 2.39 Venus 4.79 1.43  下载: 导出CSV
下载: 导出CSV
-
[1] ZANUTTIGH P, MARIN G, DAL MUTTO C D, et al.Time-of-flight and structured light depth cameras:Technology and applications[M].Berlin:Springer, 2016:23-25. [2] HANSARD M, LEE S, CHOI O, et al.Time-of-flight cameras:Principles, methods and applications[M].Berlin:Springer, 2013:50-53. [3] TIPPETTS B, LEE D J, LILLYWHITE K, et al.Review of stereo vision algorithms and their suitability for resource-limited systems[J].Journal of Real-Time Image Processing, 2016, 11(1):5-25. doi: 10.1007/s11554-012-0313-2 [4] YANG Q, AHUJA N, YANG R, et al.Fusion of median and bilateral filtering for range image up-sampling[J].IEEE Transactions on Image Processing, 2013, 22(12):4841-4852. doi: 10.1109/TIP.2013.2278917 [5] GARRO V, MUTTO C D, ZANUTTIGH P, et al. A novel interpolation scheme for range data with side information[C]//Proceedings of the 2009 Conference on Visual Media Production. Piscataway, NJ: IEEE Press, 2009: 52-60. [6] ZHU J, WANG L, GAO J, et al.Spatial-temporal fusion for high accuracy depth maps using dynamic mrfs[J].IEEE Transactions on Pattern Analysis and Machine Intelligence, 2010, 32(5):899-909. doi: 10.1109/TPAMI.2009.68 [7] VINEET G, JAN C, RADU H. High-resolution depth maps based on ToF-stereo fusion[C]//Proceedings of IEEE Conference on Robotics and Automation. Piscataway, NJ: IEEE Press, 2012: 4742-4749. [8] MUTTO C D, ZANUTTIGH P, MATTOCCIA S, et al. Locally consistent ToF and stereo data fusion[C]//Proceedings of the 12th International Conference on Computer Vision-Volume Part I. Berlin: Springer, 2012: 598-607. [9] FUSIELLO A, TRUCCO E, VERRI A.A compact algorithm for rectification of stereo pairs[J].Machine Vision and Applications, 2000, 12(1):16-22. doi: 10.1007/s001380050120 [10] KAHLMANN T, INGENSAND H.Calibration and development for increased accuracy of 3D range imaging cameras[J].Journal of Applied Geodesy, 2008, 2(1):1-11. doi: 10.1515/JAG.2008.001 [11] SCHARSTEIN D, SZELISKI R.A taxonomy and evaluation of dense twoframe stereo correspondence algorithms[J].International Journal of Computer Vision, 2002, 47(1-3):7-42. [12] PIATTI D, RINAUDO F.SR-4000 and Camcube 3.0 time of flight (ToF) cameras:Tests and comparison[J].Remote Sensing, 2012, 4(4):1069-1089. doi: 10.3390/rs4041069 [13] MUTTO C D, ZANUTTIGH P, CORTELAZZO G.Probabilistic ToF and stereo data fusion based on mixed pixels measurement models[J].IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(11):2260-2272. doi: 10.1109/TPAMI.2015.2408361 [14] DOLSON J, BAEK J, PLAGEMANN C, et al. Up-sampling range data in dynamic environments[C]//Proceedings of IEEE Conference on Computer Vision and Pattern Recognition. Piscataway, NJ: IEEE Press, 2010: 1141-1148. [15] HU X, MORDOHAI P.A quantitative evaluation of confidence measures for stereo vision[J].IEEE Transactions on Pattern Analysis and Machine Intelligence, 2012, 34(11) 2121-2133. doi: 10.1109/TPAMI.2012.46 [16] GUDMUNDSSON S, AANAES H, LARSEN R.Fusion of stereo vision and time of flight imaging for improved 3D estimation[J].International Journal Intelligent System Technologies and Applications, 2008, 5(3):425-433. [17] EVANGELIDIS G, HANSARD M, HORAUD R.Fusion of range and stereo data for high-resolution scene-modeling[J].IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(11):2178-2192. doi: 10.1109/TPAMI.2015.2400465 [18] NAIR R, LENZEN F, MEISTER S, et al. High accuracy ToF and stereo sensor fusion at interactive rates[C]//Proceedings of European Conference on Computer Vision Workshops. Berlin: Springer, 2012: 7584. [19] 刘娇丽, 李素梅, 李永达, 等.基于TOF与立体匹配相融合的高分辨率深度获取[J].信息技术, 2016(12):190-193.LIU J L, LI S M, LI Y D, et al.High-resolution depth maps based on TOF-stereo fusion[J].Information Technology, 2016(12):190-193(in Chinese). [20] 张康. 基于图像深度感知中的立体匹配和深度增强算法研究[D]. 北京: 清华大学, 2015: 84-87.ZHANG K. Stereo matching and depth enhancement in image-based depth perception[D]. Beijing: Tsinghua University, 2015: 84-87(in Chinese). 期刊类型引用(2)
1. 马立,范霁康,从保强,杨东青,彭勇,王克鸿. 高氮钢超音频脉冲GMA增材制造熔滴过渡特性. 兵工学报. 2024(10): 3686-3695 .  百度学术
百度学术2. 王强,齐铂金,从保强,崔珍山. P-GMAW电源外特性对焊接过程稳定性的影响. 焊接学报. 2018(11): 63-68+131-132 . 百度学术其他类型引用(4)
-

 下载:
下载:

 百度学术
百度学术
 点击查看大图
点击查看大图
计量
- 文章访问数: 1157
- HTML全文浏览量: 184
- PDF下载量: 616
- 被引次数: 6
