



-
摘要:
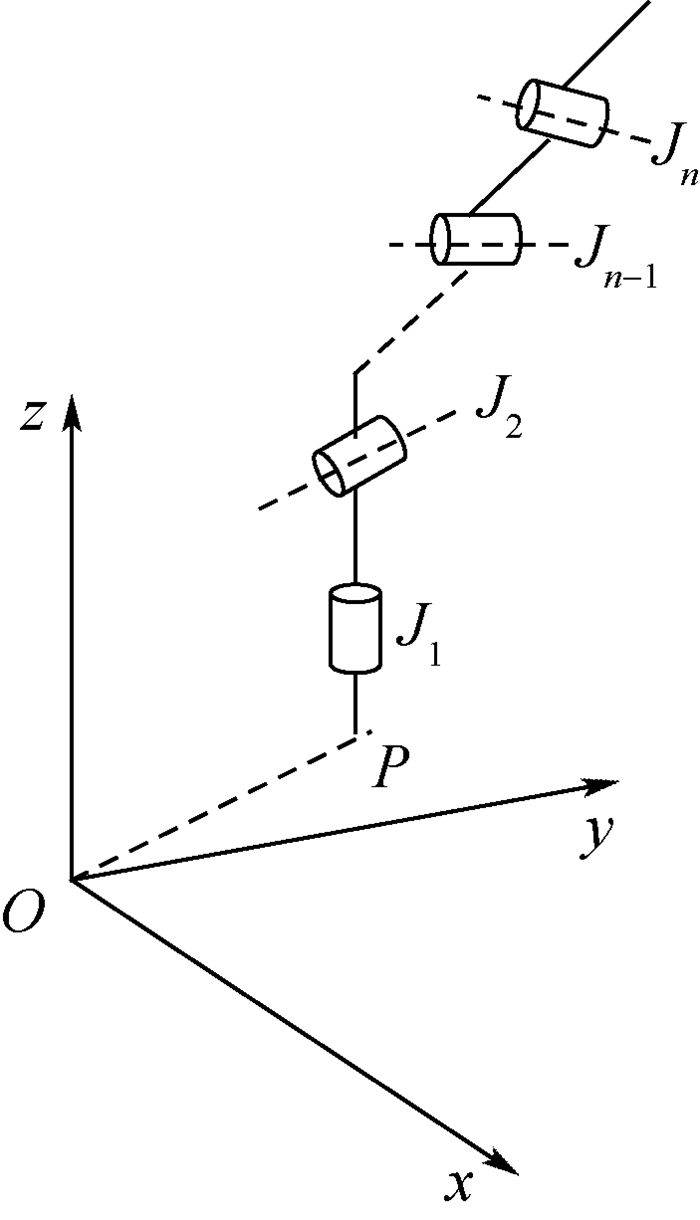
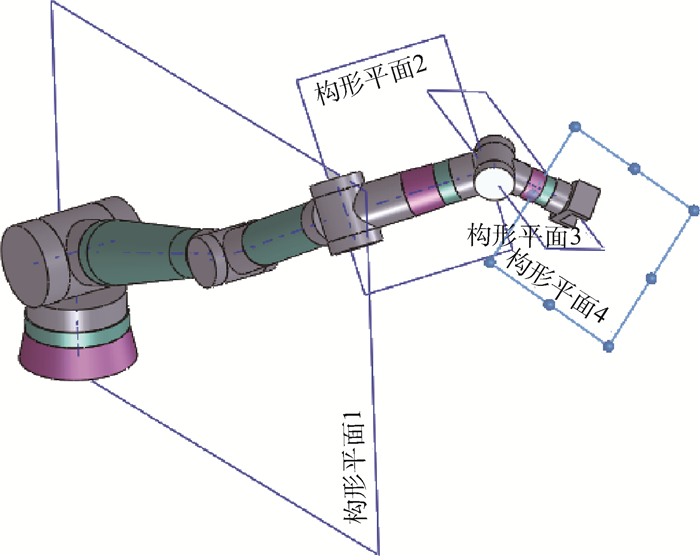
针对冗余机械臂在空间轨迹规划过程中构形多样但不唯一的问题,提出了一种快速求解冗余机械臂在空间轨迹规划过程中的最优构形的方法。受机械臂关节约束和空间障碍的限制,冗余机械臂的轨迹规划是一个复杂的过程。而为了保证机械臂运动的平稳性,冗余机械臂工作构形由多个机械臂关节轴线依次连接形成的构形平面组成。从构形平面入手,利用空间几何的方法,对冗余机器人进行空间轨迹规划,通过空间矢量引导、避障路径的比较,快速找到空间优化的路径,实现多目标轨迹规划方法。该方法用于一个7自由度冗余机械臂,结果表明该技术能够快速直观解决路径规划问题,不依赖具体的机械臂工作构形,适用于更多自由度的冗余机械臂。
Abstract:This paper proposes a novel method for solving the problem of multi-goal redundant manipulator trajectory planning. Specifically, Specifically, the trajectory planning path for a redundant manipulator is a complicated process with the joint constraint and the limit of spatial obstacle. First, to ensure stability of the manipulator motion, the work configuration of a redundant manipulator can be composed of multiple joint axes, which are connected in sequence. Second, by using the spatial geometry method, spatial trajectory planning for a redundant manipulator can be performed based on the configuration plane. Third, the optimized spatial path can be quickly obtained, which achieves multi-goal trajectory planning using the method of spatial vector leading, obstacle avoidance path comparing and choosing. Finally, a simulation using a 7-DOF redundant manipulator is conducted. The simulation result shows that the path planning problem can be solved quickly and intuitively by this method. Further, it does not depend on the work configuration of the manipulator and can be applied to redundant manipulators with more degrees of freedom.
-

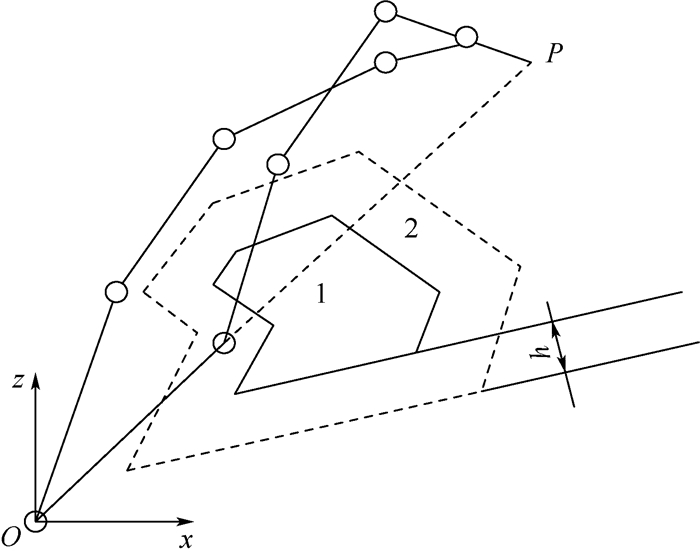
图 3 构形平面内的障碍物干涉检测
Figure 3. Interference detection of obstacles within configuration planes

图 5 已知轨迹点的构形平面规划
Figure 5. Configuration plane planning based on known trajectory points

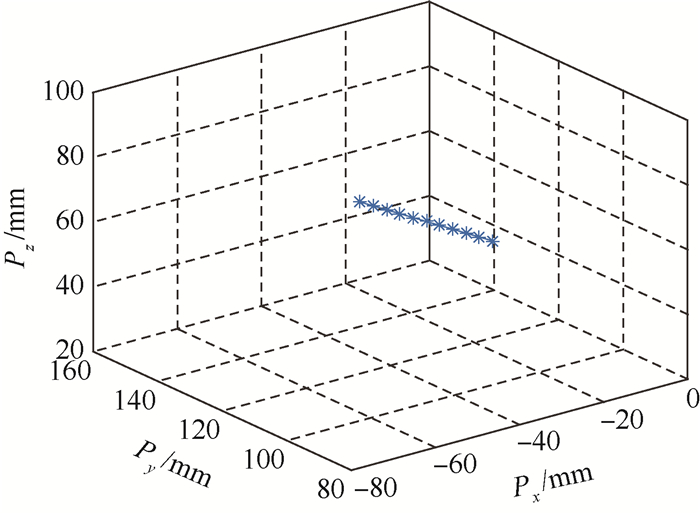
图 8 机械臂插补轨迹点的坐标
Figure 8. Coordinates of trajectory interpolation points of manipulator

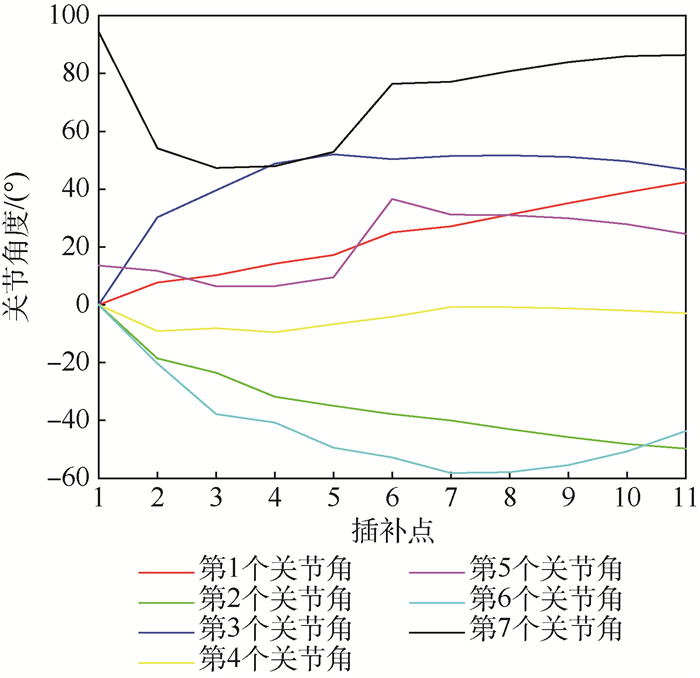
图 9 机械臂各关节在插补点的角度
Figure 9. Joint angles of manipulator when end-effector is located in trajectory points
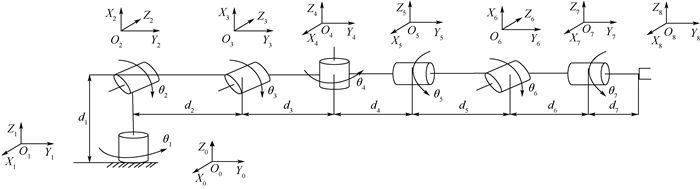
表 1 关节参数
Table 1. Joint parameters
关节名称 运动范围/(°) 关节参数尺寸/mm 关节1 -180≤θ1≤180 d1=350 关节2 -190≤θ2≤10 d2=450 关节3 -100≤θ3≤100 d3=350 关节4 -100≤θ4≤100 d4=150 关节5 -150≤θ5≤150 d5=145 关节6 -100≤θ6≤100 d6=150 关节7 -180≤θ7≤180 d7=160  下载: 导出CSV
下载: 导出CSV
-
[1] LOZANO-PEREZ T.Automatic planning of manipulator transfer movements[J].IEEE Transaction on Systems Man and Cybermetics, 1980, 11(10):681-698. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=0520071204583065 [2] LOZANO-PEREZ T.Spatial planning:A configuration space approach[J].IEEE Transactions on Computers, 2006, 32(2):108-120. http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ026353083/ [3] LAVALLE S.Rapidly-exploring random trees: Progress and prospects[C]//Procceedings of the 2000 Fourth International Workshop on Algorithmic Foundations on Robotics.Piscataway, NJ: IEEE Press, 2000: 1-19. [4] BERTRAM D, KUFFNER J, DILLMANN R, et al.An integrated approach to inverse kinematics and path planning for redundant manipulators[C]//Proceedings of the 2006 IEEE International Conference on Robotics and Automation.Piscataway, NJ: IEEE Press, 2006: 1874-1879. [5] STILMAN M.Global manipulation planning in robot joint space with task constraints[J].IEEE Transactions on Robotics, 2010, 26(3):576-584. doi: 10.1109/TRO.2010.2044949 [6] 陈撼, 裴甲瑞, 陆智俊, 等.空间冗余机械臂的路径规划算法研究[J].上海航天, 2017, 34(5):30-39. http://d.old.wanfangdata.com.cn/Periodical/shht201705005CHEN H, PEI J R, LU Z J, et al.Research on path planning algorithm for spatially redundant manipulator[J].Shanghai Aerospace, 2017, 34(5):30-39(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/shht201705005 [7] 高涵, 张明路, 张小俊.冗余机械臂空间轨迹规划综述[J].机械传动, 2016, 40(10):176-180. http://qikan.cqvip.com/article/detail.aspx?id=670276598GAO H, ZHANG M L, ZHANG X J.A survey of space trajectory planning for redundant manipulators[J].Mechanical Transmission, 2016, 40(10):176-180(in Chinese). http://qikan.cqvip.com/article/detail.aspx?id=670276598 [8] HADDAD M, KHALIL W, LEHTIHET H E.Trajectory planning of unicycle mobile robots with a trapezoidal-velocity constraint[J].IEEE Transactions on Robotics, 2010, 26(5):954-962. doi: 10.1109/TRO.2010.2062090 [9] SHIMIZU M, KAKUYA H, YOON W K, et al.Analytical inverse kinematic computation for 7-DOF redundant manipulators with joint limits and Its application to redundancy Resolution[J].IEEE Transactions on Robotics, 2008, 24(5):1131-1142. doi: 10.1109/TRO.2008.2003266 [10] TIAN Y, CHEN X, HUANG Q, et al.Kinematic analysis and solution of the natural posture of a 7-DOF humanoid manipulator[C]//Proceedings of the 2010 IEEE International Conference on Automation and Logistics.Piscataway, NJ: IEEE Press, 2010: 156-162. [11] TRAN M T, SOUERES P, TAIX M, et al.Humanoid human-like reaching control based on movement primitives[C]//Proceedings of the 201019th IEEE International Symposium on Robot and Human Interactive Communication. Piscataway, NJ: IEEE Press, 2010: 546-551. [12] MARTIN D P, BAILLIEUL J, HOLLERBACH J M.Resolution of kinematic redundancy using optimization techniques[J].IEEE Transactions on Robotics and Automation, 1989, 5(4):529-533. doi: 10.1109/70.88067 [13] 贠超, 刘刚, 王刚, 等.基于RBF神经网络和二次规划的冗余机械臂避障问题研究[J].机电工程, 2016, 33(1):1-7. doi: 10.3969/j.issn.1009-9492.2016.01.001YUN C, LIU G, WANG G, et al.Research on obstacle avoidance of redundant manipulator based on RBF neural network and quadratic programming[J].Electrical and Mechanical Engineering, 2016, 33(1):1-7(in Chinese) doi: 10.3969/j.issn.1009-9492.2016.01.001 [14] 王俊龙, 张国良, 羊帆, 等.改进人工势场法的机械臂避障路径规划[J].计算机工程与应用, 2013, 49(21):266-270. doi: 10.3778/j.issn.1002-8331.1201-0360WANG J L, ZHANG G L, YANG F, et al.Improved artificial potential field method for manipulator obstacle avoidance path planning[J].Computer Engineering and Applications, 2013, 49(21):266-270(in Chinese). doi: 10.3778/j.issn.1002-8331.1201-0360 [15] 汪首坤, 朱磊, 王军政.基于导航势函数法的六自由度机械臂避障路径规划[J].北京理工大学学报, 2015, 35(2):186-191. http://d.old.wanfangdata.com.cn/Periodical/bjlgdxxb201502015WANG S K, ZHU L, WANG J Z.Obstacle avoidance path planning based on navigation potential function method for six degrees of freedom manipulator[J].Journal of Beijing Institute of Technology, 2015, 35(2):186-191(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/bjlgdxxb201502015 -

 下载:
下载:



 点击查看大图
点击查看大图

计量
- 文章访问数: 774
- HTML全文浏览量: 75
- PDF下载量: 617
- 被引次数: 0
