



-
摘要:
针对水下机械手遥操作过程中数学模型及外部干扰引起不确定问题提出了自适应双边控制策略。对主机械手模型参数与外部干扰引起的不确定,设计了基于名义模型的参考自适应阻抗控制律,根据主手力与从手力误差来调节期望模型的参考位置,利用自适应控制律补偿模型不确定性。针对从机械手的不确定性采用径向基函数(RBF)神经网络进行自适应补偿,通过设计滑模变结构控制器与鲁棒自适应控制器消除逼近误差,满足了从机械手对主机械手位置跟踪。设计了李雅普诺夫函数证明跟踪性能与全局稳定性,保证力-位置跟踪的渐进收敛性能。结果表明:整体控制在模型不确定及外部干扰条件下具有很好的力-位置跟踪能力,整体系统具有稳定性和可靠性,并且具有鲁棒性及自适应控制能力。
Abstract:An adaptive bilateral control strategy is proposed for the uncertainty of the mathematical model and external disturbances during the teleoperation of underwater manipulator. A reference adaptive impedance control law based on the nominal model is designed for the uncertainty of the parameters of the master manipulator model and the external disturbance. The reference position of the expected model is adjusted by the deviation between the force of operator and the slave manipulator, and the model uncertainty is compensated by the adaptive control law. Aimed at the uncertainty of slave manipulator, the adaptive compensation is achieved by the radial basis function (RBF) neural network, and the approximation deviation is eliminated by the design of the sliding mode variable structure controller and the robust adaptive controller, which satisfies the position tracking of the slave manipulator to the master manipulator. The tracking performance and global stability are proved by Lyapunov function, and the asymptotic convergence of force-position tracking is guaranteed. The results show that the overall controller has good force-position tracking ability under the conditions of model uncertainty and external disturbance. The whole system is stable and feasible, and has robustness and adaptive control ability.
-
Key words:
- teleoperation /
- impedance control /
- neural sliding mode control /
- force-position tracking /
- robustness /
- adapation
-
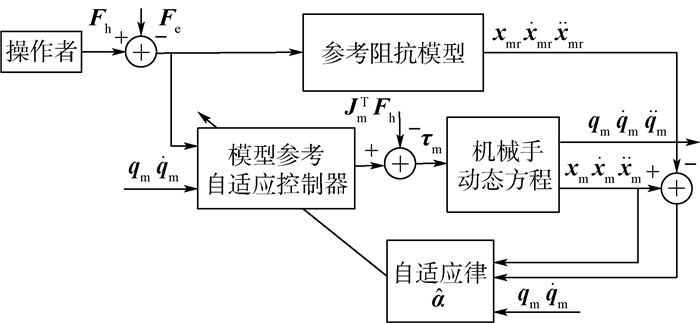
图 2 主手模型参考自适应阻抗控制结构
Figure 2. Structure of master manipulator model reference adaptive impedance control

图 5 遥操作参考位置、主手、从手位置跟踪曲线
Figure 5. Tracking curves of reference position and position of master and slave manipulator in teleoperation
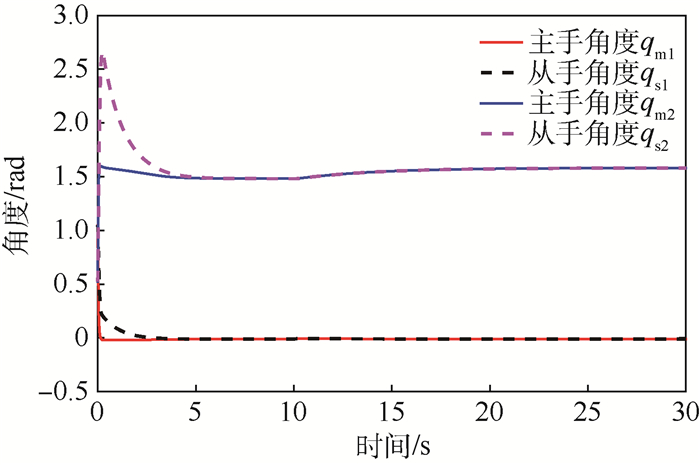
图 6 遥操作主从手角度跟踪曲线
Figure 6. Angle tracking curves of master and slave manipulator in teleoperation
-
[1] LI Y, JOHANSSON R, LIU K, et al.Guaranteed cost control design for delayed teleoperation systems[J].Journal of the Franklin Institute, 2015, 352(11):5085-5105. doi: 10.1016/j.jfranklin.2015.08.011 [2] 贾鹤鸣, 张利军, 齐雪, 等.基于神经网络的水下机器人三维航迹跟踪控制[J].控制理论与应用, 2012, 29(7):56-62.JIA H M, ZHANG L J, QI X, et al.Three-dimensional path tracking control for autonomous underwater vehicle based on neural network[J].Control Theory & Applications, 2012, 29(7):56-62(in Chinese). [3] WANG H, XIE Y.Adaptive inverse dynamics control of robots with uncertain kinematics and dynamics[J].Automatica, 2009, 45(9):2114-2119. doi: 10.1016/j.automatica.2009.05.011 [4] 张文辉, 齐乃明, 尹洪亮.基于滑模变结构的空间机器人神经网络跟踪控制[J].控制理论与应用, 2011, 28(9):1141-1144.ZHANG W H, QI N M, YIN H L.Neural-network tracking control of space robot based on sliding-mode variable structure[J].Control Theory & Applications, 2011, 28(9):1141-1144(in Chinese). [5] GANJEFAR S, REZAEI S, HASHEMZADEH F.Position and force tracking in nonlinear teleoperation systems with sandwich linearity in actuators and time-varying delay[J].Mechanical Systems and Signal Processing, 2017, 86:308-324. doi: 10.1016/j.ymssp.2016.09.023 [6] LIU Y C, KHONG M H.Adaptive control for nonlinear teleoperators with uncertain kinematics and dynamics[J].IEEE/ASME Transactions on Mechatronics, 2015, 20(5):2550-2562. doi: 10.1109/TMECH.2015.2388555 [7] HOSSEINI S K, MOMENI H, JANABI S F, et al.A modified adaptive controller design for teleoperation systems[J].Robotics and Autonomous Systems, 2010, 58(5):676-683. doi: 10.1016/j.robot.2009.11.006 [8] LIU X, TAVAKOLI M.Adaptive control of teleoperation systems with linearly and nonlinearly parameterized dynamic uncertainties[J].Journal of Dynamic Systems Measurement & Control, 2012, 134(2):194-203. [9] CHOPRA N, SPONG M W, LOZANO R.Synchronization of bilateral teleoperators with time delay[J].Automatica, 2008, 44(8):2142-2148. doi: 10.1016/j.automatica.2007.12.002 [10] NUN~O E, SARRAS I, BASAN~EZ L, et al.Control of teleoperators with joint flexibility, uncertain parameters and time-delays[J].Robotics and Autonomous Systems, 2014, 62(12):1691-1701. doi: 10.1016/j.robot.2014.08.003 [11] HUA C C, YANG Y, GUAN X.Neural network-based adaptive position tracking control for bilateral teleoperation under constant time delay[J].Neuro Computing, 2013, 113(7):204-212. [12] WANG H.Passivity based synchronization for networked robotic systems with uncertain kinematics and dynamics[J].Automatica, 2013, 49(3):755-761. doi: 10.1016/j.automatica.2012.11.003 [13] KIM B Y, AHN H S.A design of bilateral teleoperation systems using composite adaptive controller[J].Control Engineering Practice, 2013, 21(12):1641-1652. doi: 10.1016/j.conengprac.2013.08.013 [14] SHARIFI M, BEHZADIPOUR S, VOSSOUGHI G.Nonlinear model reference adaptive impedance control for human-robot interactions[J].Control Engineering Practice, 2014, 32:9-27. doi: 10.1016/j.conengprac.2014.07.001 [15] MENDOZA M, BONILLA I, GONZÁLEZ-GALVÁN E, et al.Impedance control in a wave-based teleoperator for rehabilitation motor therapies assisted by robots[J].Computer Methods & Programs in Biomedicine, 2016, 123(C):54-67. [16] SHARIFI M, BEHZADIPOUR S, VOSSOUGHI G R.Model reference adaptive impedance control of rehabilitation robots in operational space[C]//IEEE Ras & Embs International Conference on Biomedical Robotics and Biomechatronics.Piscataway, NJ: IEEE Press, 2012: 1698-1703. [17] HSU C F, LIN C M, YEH R G.Supervisory adaptive dynamic RBF-based neural-fuzzy control system design for unknown nonlinear systems[J].Applied Soft Computing Journal, 2013, 13(4):1620-1626. doi: 10.1016/j.asoc.2012.12.028 [18] PAN Y, YU H, ER M J.Adaptive neural PD control with semiglobal asymptotic stabilization guarantee[J].IEEE Transactions on Neural Networks & Learning Systems, 2014, 25(12):2264-2274. [19] LONDHE P S, MOHAN S, PATRE B M, et al.Robust task-space control of an autonomous underwater vehicle-manipulator system by PID-like fuzzy control scheme with disturbance estimator[J].Ocean Engineering, 2017, 139:1-13. doi: 10.1016/j.oceaneng.2017.04.030 [20] 张文辉, 齐乃明, 尹洪亮.自适应神经变结构的机器人轨迹跟踪控制[J].控制与决策, 2011, 26(4):597-600.ZHANG W H, QI N M, YIN H L.Neural-variable structure-based adaptive trajectory tracking control of robot manipulators[J].Control and Decision, 2011, 26(4):597-600(in Chinese). -

 下载:
下载:



 点击查看大图
点击查看大图

计量
- 文章访问数: 735
- HTML全文浏览量: 119
- PDF下载量: 447
- 被引次数: 0
