



-
摘要:
2个四旋翼无人机(UAVs)的吊挂飞行问题属于协同合作的范畴,现有的很多应用将该问题考虑为只有一个目标函数的控制系统。为了充分利用无人机各自的性能,将其看成是具有不同目标函数的决策主体,并在非合作博弈的框架下进行控制器设计。首先,建立了受控系统的数学模型及其线性形式,同时引入作用在吊挂负载上的外部干扰。然后,将该模型转换成开环信息结构下的有限时间差分博弈问题,并将该问题的纳什均衡解和滚动优化的思想相结合,设计一种基于状态反馈的滚动纳什控制器。最后,通过2个仿真实例验证该方法可以很好地控制无人机进行协同与合作。
Abstract:Transporting a cable-suspended payload with two quadrotor unmanned aerial vehicles (UAVs) involves controlling two quadrotor UAVs cooperatively. The existing methods formulate the problem into a control system with only one cost function. In this paper, in order to exploit their individual interest, quadrotor UAVs are considered as two decision-makers with different cost functions and its controller is designed in the framework of noncooperative game theory. Firstly, the system's mathematic model is built with the existence of exogeneous disturbances acting on the payload. Then its linearized form is given and considered as a difference game problem under an open-loop information structure. Based on its Nash equilibrium solution and receding optimization policy, a state-feedback receding-horizon Nash controller is designed. Finally, two numerical simulations are presented, which illustrate that the quad-rotors cooperative well with the proposed controller.
-
Key words:
- quadrotor /
- unmanned aerial vehicles (UAVs) /
- game theory /
- Nash equilibrium /
- multi-agent /
- optimal control
-

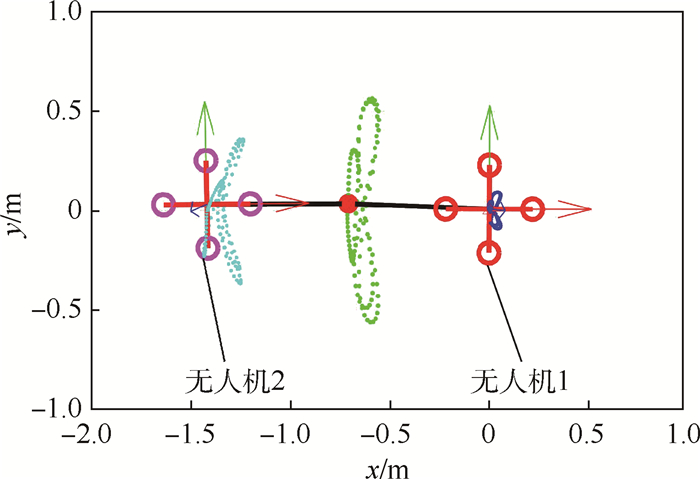
图 2 带吊挂负载的四旋翼无人机(俯视)
Figure 2. Quadrotor UAVs carrying a cable-suspended payload (Top)
-
[1] MATHEW N, SMITH S L, WASLANDER S L.Planning paths for package delivery in heterogeneous multirobot teams[J].IEEE Transactions on Automation Science and Engineering, 2015, 12(4):1298-1308. doi: 10.1109/TASE.2015.2461213 [2] ZHAN P, YU K, SWINDLEHURST A L.Wireless relay communications with unmanned aerial vehicles:Performance and optimization[J].IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(3):2068-2085. doi: 10.1109/TAES.2011.5937283 [3] DEBUSK W M.Unmanned aerial vehicle systems for disaster relief: Tornado alley[C]//Infotech@Aerospace Conferences.Reston: AIAA, 2010: 3506. https://www.researchgate.net/publication/264885840_Unmanned_Aerial_Vehicle_Systems_for_Disaster_Relief_Tornado_Alley [4] TANG S, SREENATH K, KUMAR V.Aggressive maneuvering of a quadrotor with a cable-suspended payload[C]//Robotics: Science and Systems, Workshop on Women in Robotics, 2014. [5] SREENATH K, LEE T, KUMAR V.Geometric control and differential flatness of a quadrotor UAV with a cablesuspended load[C]//52nd IEEE Conference on Decision and Control.Piscataway, NJ: IEEE Press, 2013: 2269-2274. https://www.researchgate.net/publication/271549811_Geometric_control_and_differential_flatness_of_a_quadrotor_UAV_with_a_cable-suspended_load [6] TANG S, KUMAR V.Mixed integer quadratic program trajectory generation for a quadrotor with a cable-suspended payload[C]//IEEE International Conference on Robotics and Automation (ICRA).Piscataway, NJ: IEEE Press, 2015: 2216-2222. https://www.researchgate.net/publication/283231367_Mixed_Integer_Quadratic_Program_trajectory_generation_for_a_quadrotor_with_a_cable-suspended_payload [7] DE C, FARSHIDIAN F, BUCHLI J.Aggressive optimal control for agile flight with a slung load[C]//IROS 2014 Workshop on Machine Learning in Planning and Control of Robot Motion.Piscataway, NJ: IEEE Press, 2014. http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.713.9357 [8] 鲜斌, 张旭, 杨森.无人机吊挂飞行的非线性控制方法设计[J].控制理论与应用, 2016, 33(3):273-279. http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201603001XIAN B, ZHANG X, YANG S.Nonlinear controller design for an unmanned aerial vehicle with a slung-load[J].Control Theory & Application, 2016, 33(3):273-279(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201603001 [9] 李伟荣, 方舟, 李诚龙.带悬挂负载的八旋翼无人机建模与控制[J].计算机应用, 2015, 35(S2):138-142. http://d.old.wanfangdata.com.cn/Periodical/jsjyy2015z2038LI W R, FANG Z, LI C L.Modeling and control of unmanned octocopter with slung load[J].Journal of Computer Applications, 2015, 35(S2):138-142(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jsjyy2015z2038 [10] YI K, GU F, YANG L.Sliding mode control for a quadrotor slung load system[C]//Proceedings of the 36th Chinese Control Conference.Piscataway, NJ: IEEE Press, 2017: 3967-3703. https://www.researchgate.net/publication/320114768_Sliding_mode_control_for_a_quadrotor_slung_load_system [11] GUO M, SU Y, GU D.Mixed H2/H∞ tracking control with constraints for single quadcopter carrying a cable-suspended payload[C]//IFAC-PapersOnLine.Toulous: Elsevier, 2017, 50(1): 4869-4874. https://www.sciencedirect.com/science/article/pii/S2405896317314490 [12] SREENATH K, KUMAR V.Dynamics, control and planning for cooperative manipulation of payloads suspended by cables from multiple quadrotor robots[C]//Robotics: Science and Systems, 2013. https://core.ac.uk/display/22717635 [13] LEE T.Geometric control of quadrotor UAVs transporting a cablesuspended rigid body[J].IEEE Transactions on Control Systems Technology, 2018, 26(1):255-264. doi: 10.1109/TCST.2017.2656060 [14] MARTIN J O, ARIEL R.博弈论教程[M].魏玉根, 译.北京: 中国社会科学出版社, 2000: 1-2.MARTIN J O, ARIEL R.A course in game theory[M].WEI Y G, translated.Beijing: China Social Sciences Press, 2000: 1-2(in Chinese). [15] GU D.A differential game approach to formation control[J].IEEE Transactions on Control Systems Technology, 2008, 16(1):85-93. doi: 10.1109/TCST.2007.899732 [16] MYLVAGNAM T, ASTOLFI A.A differential game approach to formation control for a team of agents with one leader[C]//American Control Conference (ACC).Piscataway, NJ: IEEE Press, 2015: 1469-1474. https://www.researchgate.net/publication/282937833_A_differential_game_approach_to_formation_control_for_a_team_of_agents_with_one_leader [17] RAIMO P H.Nash and Stackelberg solutions to general linearquadratic two player difference games.Ⅰ.Open-loop and feedback strategies[J].Kybernetika, 1978, 14(1):38-56. http://www.ams.org/mathscinet-getitem?mr=479420 [18] BASAR T, OLSDER G J.Dynamic noncooperative game theory[M].2nd ed.Philadelphia:SIAM, 1998:97-100. [19] ENGWERDA J.LQ dynamic optimization and differential games[M].New York:Wiley, 2005:261-263. -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 843
- HTML全文浏览量: 110
- PDF下载量: 406
- 被引次数: 0
