



Fast calibration method of strapdown inertial navigation system based on partial axis transposition
-
摘要:
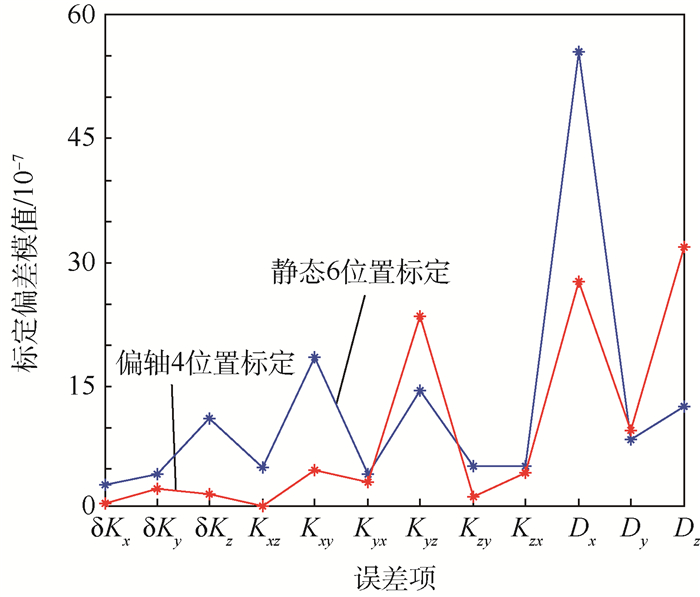
捷联惯导系统(SINS)中惯性测量单元(IMU)的转位方案设计对系统的快速标定具有重要影响。目前常见的转位方案是转轴与敏感轴重合,该方式每转动一次,仅有2个敏感轴位置发生变化。为更高效地激励误差,设计了一种IMU在转台上的偏轴安装方式,并基于这种方式提出一种新的转位方案。通过合理设计转轴与敏感轴之间的角度,使其在每次转位时有3个敏感轴位置同时发生变化,开拓了IMU新的转位空间,从而在标定陀螺组件的12个主要确定性误差时,可将传统转位方式下的最少6位置标定进一步缩减为偏轴转位下的4位置标定。通过理论分析与仿真实验表明,2种方案标定精度相同,但偏轴4位置标定方法的标定时间要比静态6位置标定方法减少33%,且标定结果的稳定性要好于静态6位置标定方法。
Abstract:The design of the transposition scheme of inertial measurement unit (IMU) has an important influence on the rapid calibration of strapdown inertial navigation system (SINS). In the traditional transposition scheme, both the rotating shaft and the sensitive axis are reclosed, and only two sensitive axis positions change for once per transposition. In order to stimulate the error more efficiently, a new partial axis installation method of IMU on the turntable is designed, and a new scheme of off-axis transposition is proposed. By properly designing an angle between the rotating shaft and the sensitive shaft, it makes three sensitive axis positions change at the same time, and opens up a new transposition space of IMU. Therefore, when calibrating the 12 main determinacy errors of gyroscope module, the minimum six-position calibration under traditional transposition mode can be further reduced to four-position calibration under off-axis transposition. Through theoretical analysis and simulation experiments, it is shown that the calibration accuracy of the two schemes is the same, but the calibration time of the four-position calibration scheme is 33% lower than that of the static six-position calibration scheme, and the stability of the calibration results is better than the static six-position calibration scheme.
-

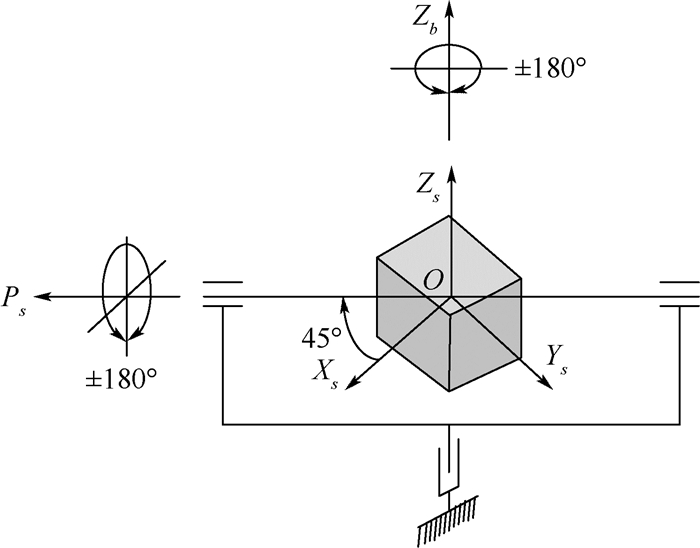
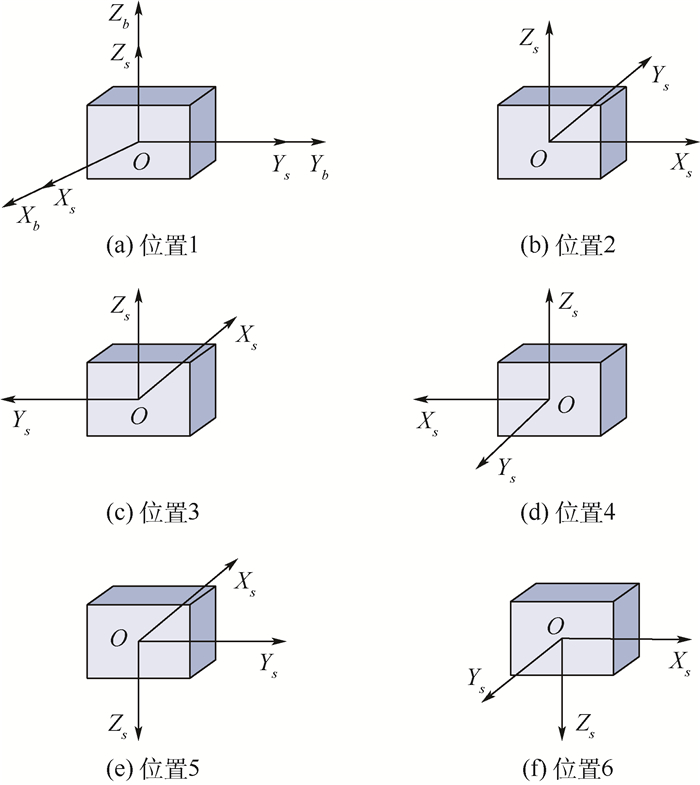
图 1 静态6位置标定转位方案示意图
Figure 1. Schematic diagram of static six-position calibration transposition scheme

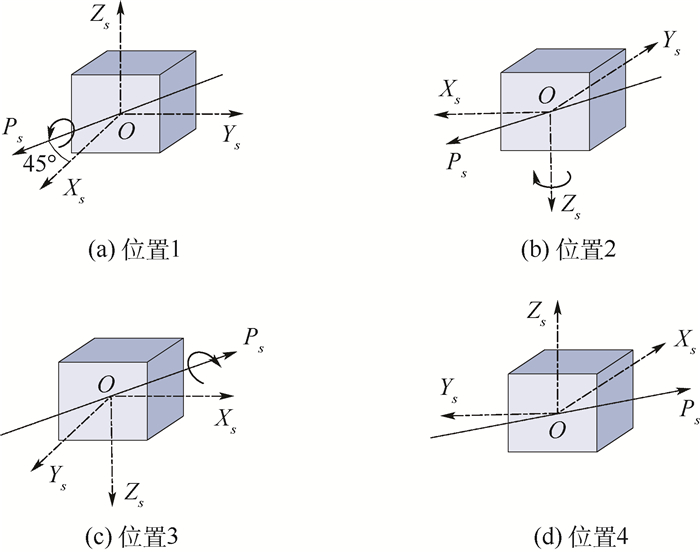
图 3 偏轴4位置标定方法转位路径
Figure 3. Transposition path of partial axis four-position calibration method

图 4 静态6位置标定方法陀螺仪标度因数误差
Figure 4. Gyro scale factor error of static six-position calibration method

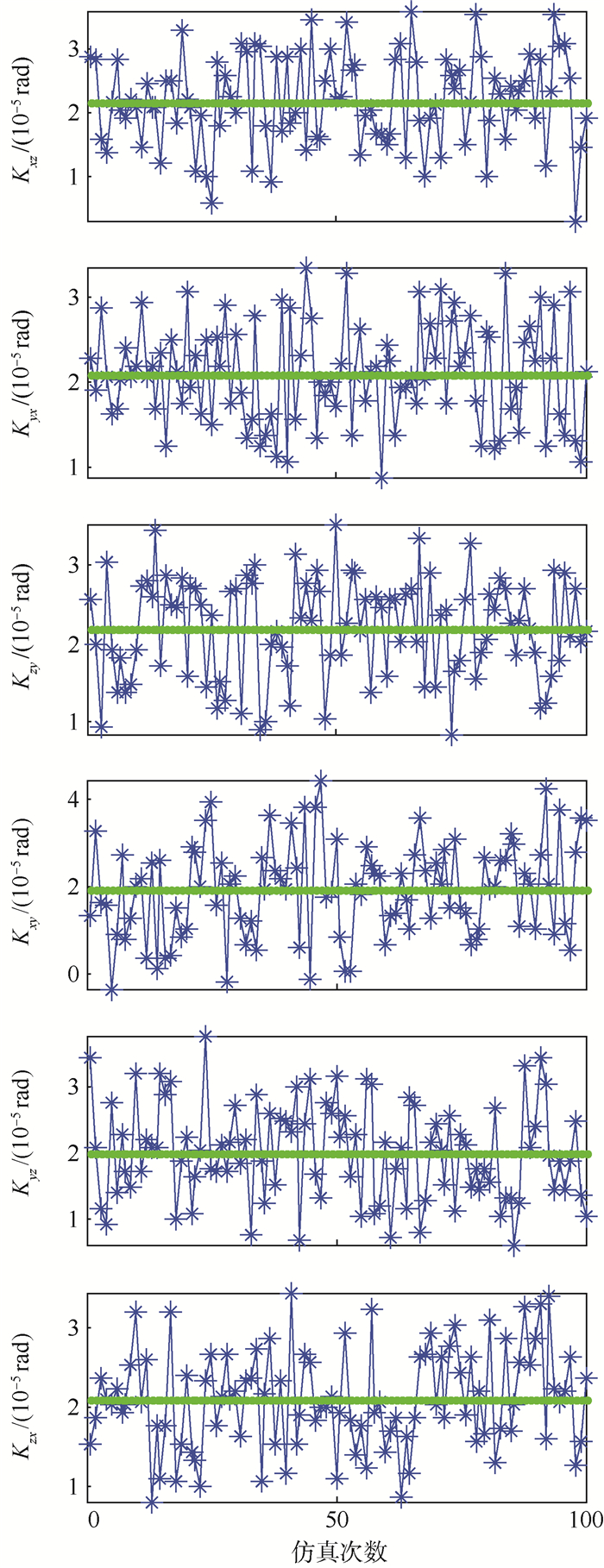
图 5 静态6位置标定方法陀螺仪安装误差
Figure 5. Gyro installation error of static six-position calibration scheme

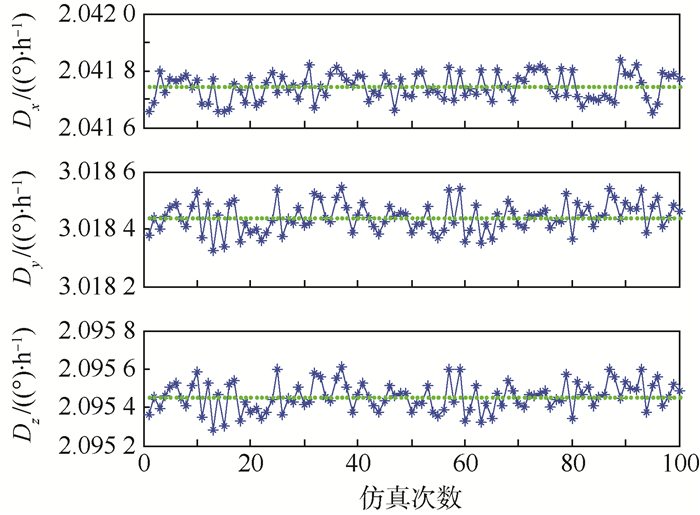
图 6 静态6位置标定方法陀螺仪常值误差
Figure 6. Constant value error of gyroscope in static six-position calibration method

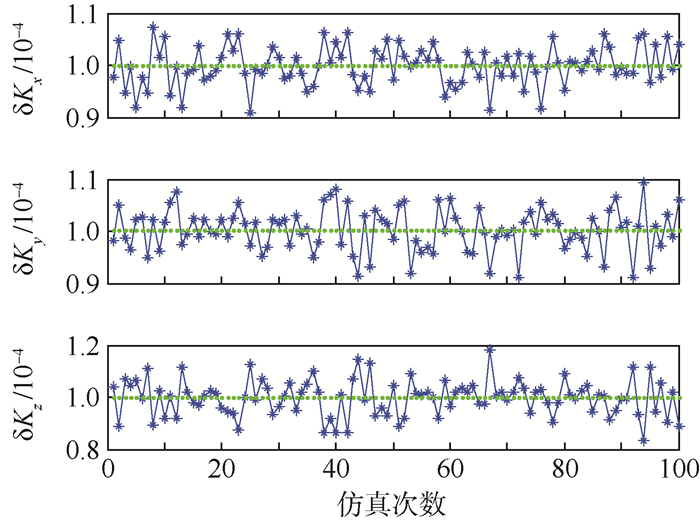
图 7 偏轴4位置标定方法陀螺仪标度因数误差
Figure 7. Scale factor error of gyroscope in four-position calibration method of partial axis

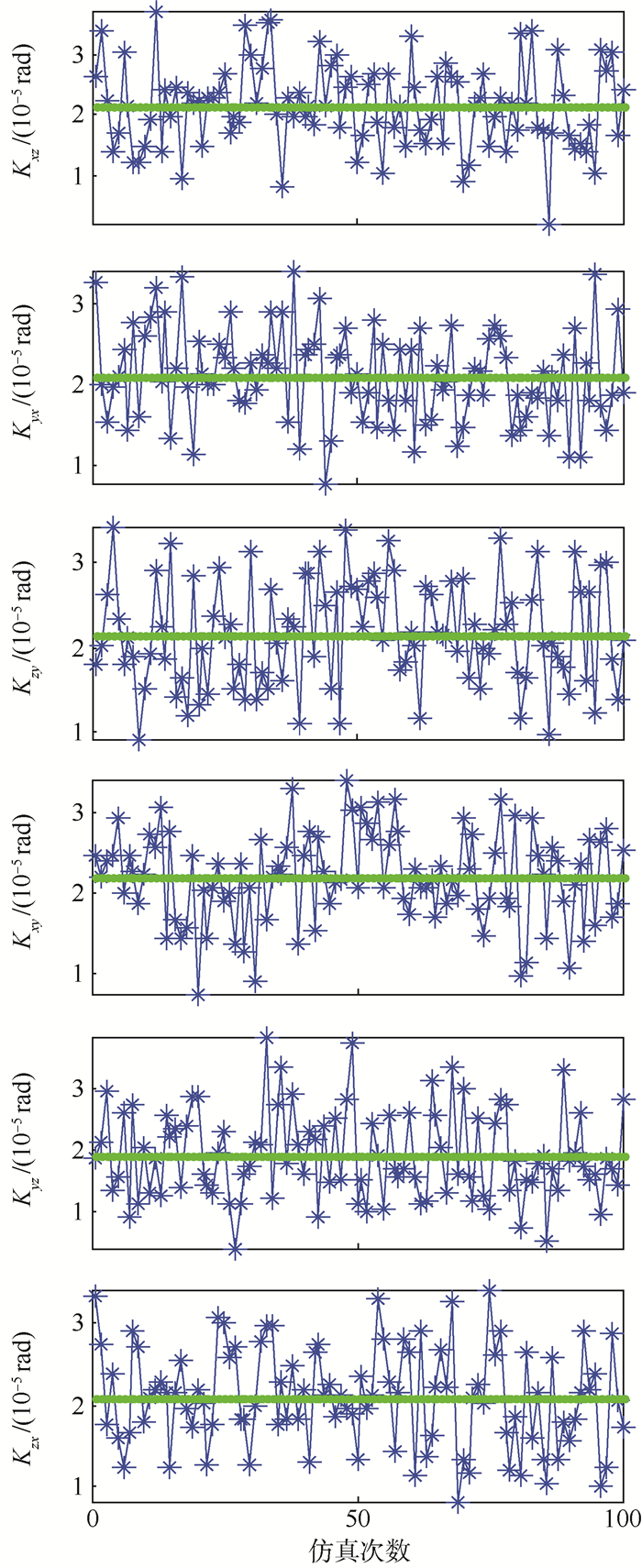
图 8 偏轴4位置标定方法陀螺仪安装误差
Figure 8. Installation error of gyroscope in four-position calibration method of partial axis

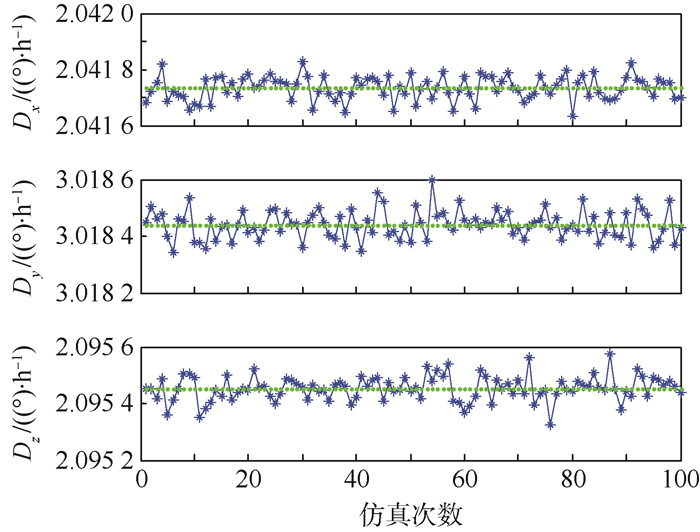
图 9 偏轴4位置标定方法陀螺仪常值误差
Figure 9. Constant value error of gyroscope in four-position calibration method of partial axis

图 10 2种标定方法所标定出的各个误差项的偏差模值
Figure 10. Deviation mode values of each error calibrated by two calibration methods

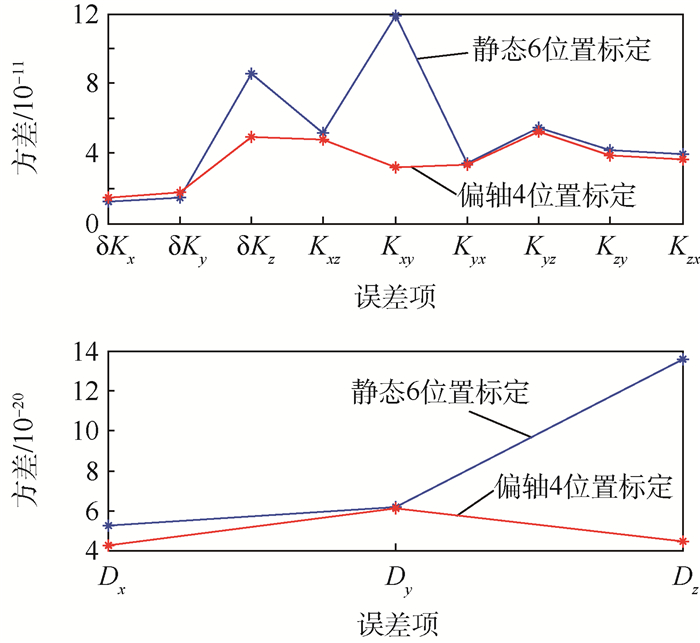
图 11 2种标定方法标定各个误差项时的方差
Figure 11. Variance of each error calibrated by two calibration methods
表 1 不同标定方法下的陀螺仪误差参数比较
Table 1. Comparison of gyroscope error parameters under different calibration methods
误差项 静态6位置标定 偏轴4位置标定 δKx/10-4 0.996 871 0.999 207 δKy/10-4 0.995 594 0.100 265 δKz/10-4 1.011 19 0.997 956 Kxz/(10-5rad) 2.197 14 2.151 31 Kxy/(10-5rad) 1.958 93 2.194 24 Kyx/(10-5rad) 2.100 79 2.110 21 Kyz/(10-5rad) 2.000 29 1.910 05 Kzy/(10-5rad) 2.198 92 2.161 23 Kzx/(10-5rad) 2.090 67 2.098 70 Dx/((°)·h-1) 2.041 742 49 2.041 734 15 Dy/((°)·h-1) 3.018 441 56 3.018 441 43 Dz/((°)·h-1) 2.095 456 24 2.095 454 32  下载: 导出CSV
下载: 导出CSV
-
[1] 张华强, 赵剡, 陈雨.捷联惯性导航系统整体标定新方法[J].北京航空航天大学学报, 2012, 38(4):459-463. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK201200680159ZHANG H Q, ZHAO Y, CHEN Y.New system calibration method for strapdown inertial navigation system[J].Journal of Beijing University of Aeronautics and Astronautics, 2012, 38(4):459-463(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK201200680159 [2] 丁继成, 李冠男, 班镜超.基于双轴位置转台的捷联惯导系统级标定技术[J].舰船科学技术, 2015, 37(4):76-83. doi: 10.3404/j.issn.1672-7649.2015.04.015DING J C, LI G N, BAN J C.Research on SINS systematic calibration technique based on dual-axis turntable[J].Ship Science and Technology, 2015, 37(4):76-83(in Chinese). doi: 10.3404/j.issn.1672-7649.2015.04.015 [3] SUN F, SUN W, GAO W, et al.Research on the technology of rotational motion for FOG strapdown inertial navigation system[C]//Processing of the 2009 IEEE International Conference on Mechatronics and Automation.Piscataway, NJ: IEEE Press, 2009: 4913-4918. [4] GAO W, ZHANG Y, WANG J G.Research on initial alignment and self-calibration of rotary strapdown inertial navigation systems[J].Sensors, 2015, 15(2):3154-3171. doi: 10.3390/s150203154 [5] 王昆明, 谢建, 周召发, 等.双轴旋转捷联惯导的误差参数标定方法[J].西安交通大学学报, 2016, 50(10):153-160. doi: 10.7652/xjtuxb201610023WANG K M, XIE J, ZHOU Z F, et al.A calibration method of error parameters for dual-axial rotary strapdown inertial navigation systems[J].Journal of Xi'an Jiaotong University, 2016, 50(10):153-160(in Chinese). doi: 10.7652/xjtuxb201610023 [6] EDUARDO N, HUGH D W.Initial calibration and alignment of low-cost inertial navigation units for land vehicle applications[J].Journal of Robotic Systems, 1999, 16(2):81-92. doi: 10.1002/(ISSN)1097-4563 [7] LIU Q, LIU L, QI Z K.Error analysis and compensation of strapdown inertial navigation system[J].Journal of Beijing Institute of Technology:English Edition, 2002, 11(2):117-120. http://en.cnki.com.cn/Article_en/CJFDTOTAL-BLGY200202001.htm [8] YUN C S, GOOK P C.A calibration technique for a redundant IMU containing low-grade inertial sensors[J].Electronics and Telecommunications Research Institute Journal, 2005, 27(4):418-425. doi: 10.4218/etrij.05.0104.0191/citedby [9] 孙伟.旋转调制型捷联惯性导航系统[M].北京:测绘出版社, 2014:84-87.SUN W.Rotary modulation strapdown inertial navigation system[M].Beijing:Surveying and Mapping Press, 2014:84-87(in Chinese). [10] 董春梅, 陈希军, 任顺青.捷联惯导系统的一种系统级标定方法[J].导航定位与授时, 2016, 3(4):74-80. http://d.old.wanfangdata.com.cn/Periodical/zggxjsxb200801001DONG C M, CHEN X J, REN S Q.Systematic calibration method for strapdown inertial navigation system[J].Navigation Positioning & Timing, 2016, 3(4):74-80(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/zggxjsxb200801001 [11] 孙枫, 孙伟.基于双轴转位机构的光纤陀螺标定方法[J].控制与决策, 2011, 26(3):346-350. http://d.old.wanfangdata.com.cn/Periodical/kzyjc201103005SUN F, SUN W.Research on calibration of IFOG based on two-axis indexing[J].Control and Decision, 2011, 26(3):346-350(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/kzyjc201103005 [12] 包为民, 申功勋, 李华滨.惯性平台在系统中多位置翻滚自标定方法[J].北京航空航天大学学报, 2011, 37(4):462-465. http://www.cnki.com.cn/Article/CJFDTOTAL-BJHK201104017.htmBAO W M, SHEN G X, LI H B.Investigation on inertial platform multi-position rolling self-calibration[J].Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(4):462-465(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-BJHK201104017.htm [13] 牟玉涛, 周振威, 方海涛.SINS外场系统级标定方法的优化——最佳六位置[J].北京航空航天大学学报, 2011, 37(7):855-860. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK201101694291MOU Y T, ZHOU Z W, FAGN H T.Optimization of systematic calibration method for SINS in outer field-optimal six-position[J].Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(7):855-860(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK201101694291 [14] 杨国梁, 王玮.基于双轴旋转的惯导系统误差自补偿技术[J].北京航空航天大学学报, 2012, 38(4):519-524. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK201200690632YANG G L, WANG W.Error auto-compensation technology of inertial navigation system based on double-axis rotation[J].Journal of Beijing University of Aeronautics and Astronautics, 2012, 38(4):519-524(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK201200690632 [15] 谭彩铭, 王宇, 苏岩, 等.捷联惯导系统最简多位置解析对准[J].北京航空航天大学学报, 2015, 41(9):1645-1650. http://bhxb.buaa.edu.cn/CN/abstract/abstract13424.shtmlTAN C M, WANG Y, SU Y, et al.The simplest multi-position analytic alignment for SINS[J].Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(9):1645-1650(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract13424.shtml [16] 张小跃, 杨功流, 张春熹.三轴一体光纤陀螺高精度标定方法[J].北京航空航天大学学报, 2012, 38(4):478-486. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK201200661518ZHANG X Y, YANG G L, ZHANG C X.High precision calibration method for three-cluster FOG[J].Journal of Beijing University of Aeronautics and Astronautics, 2012, 38(4):478-486(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK201200661518 [17] 苗继松, 邵琼玲, 任元.基于三元角的坐标旋转变换方法[J].北京航空航天大学学报, 2017, 43(12):2539-2546. http://bhxb.buaa.edu.cn/CN/abstract/abstract14248.shtmlMIAO J S, SHAO Q L, REN Y.Coordinate rotation transformation method based on ternary angle[J].Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(12):2539-2546(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract14248.shtml -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 743
- HTML全文浏览量: 121
- PDF下载量: 296
- 被引次数: 0
