



Nuclear magnetic resonance gyroscope high-precision magnetic field drive technology
-
摘要:
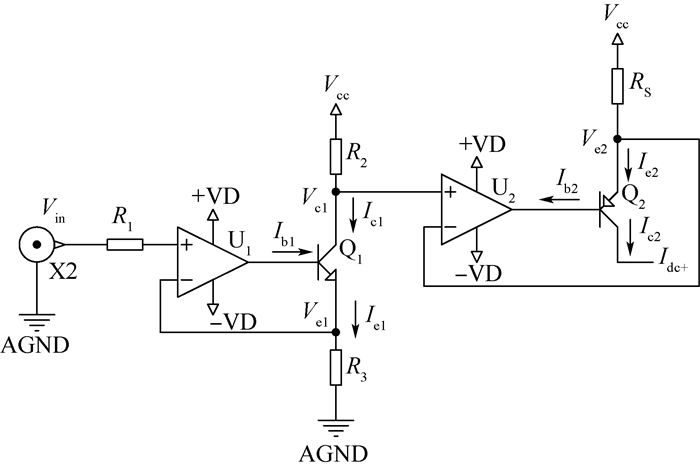
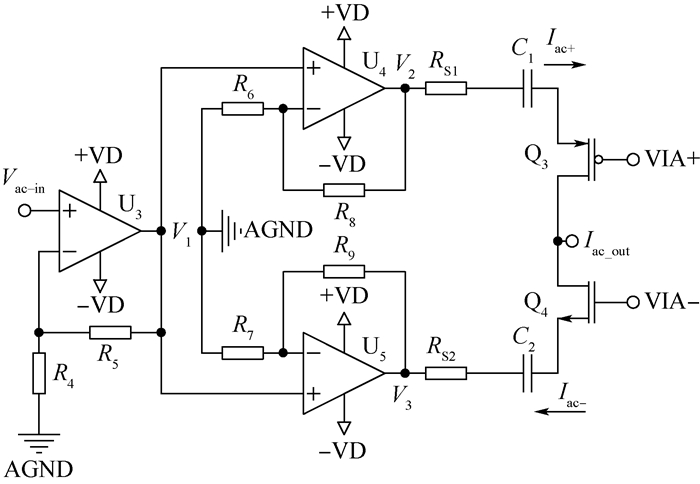
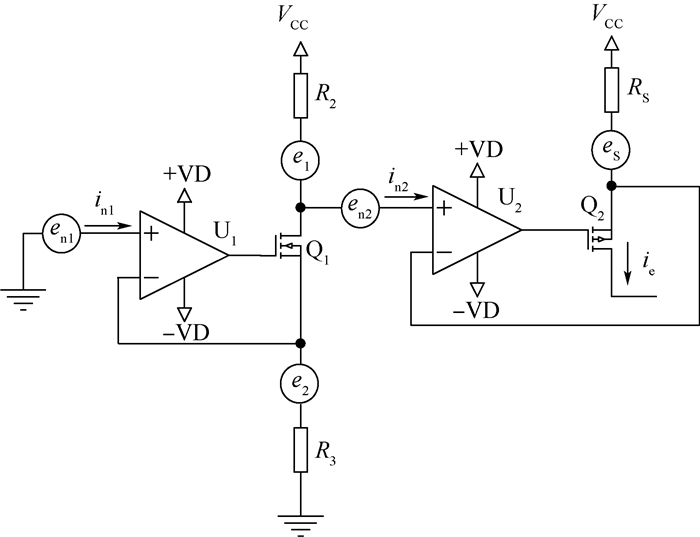
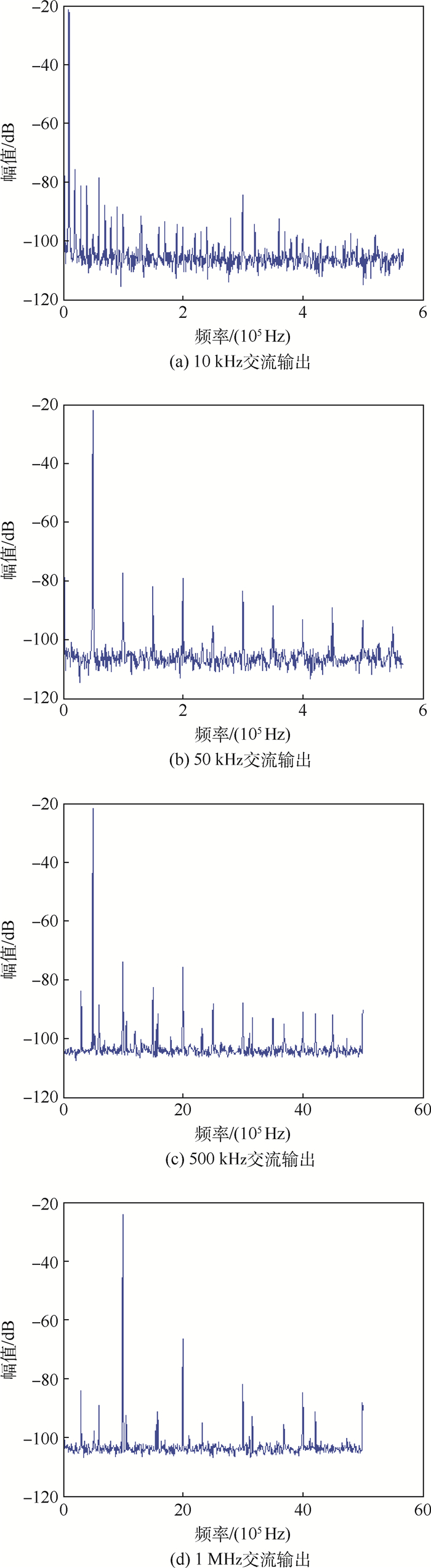
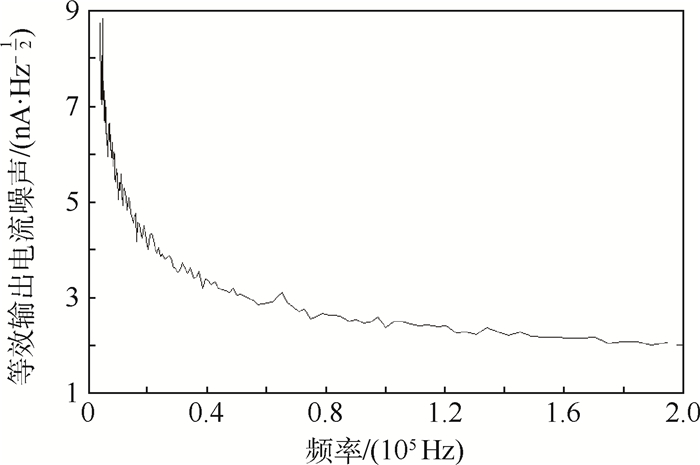
核磁共振陀螺(NMRG)是利用激光与核磁共振气室中的碱金属原子和惰性气体原子的相互作用使核子以拉莫尔频率进动,并通过磁场驱动技术对气室磁场实现闭环控制和对剩磁进行补偿来维持核子的共振状态,进而能够检测载体的角速度信息。磁场驱动技术作为磁场闭环控制的重要部分,直接影响核磁共振陀螺的磁场控制精度和稳定性。为了解决核磁共振陀螺磁场控制精度和稳定性不足的关键问题,采用交直流分离设计的压控电流源方案改善磁场驱动问题,基于噪声分析理论对电路进行建模和噪声分析,并通过实验验证对三轴线圈的横向磁场控制精度达±0.046 2 nT,纵向磁场控制精度为±0.003 1 nT,实验证明该技术方案具有较强的工程应用价值。
-
关键词:
- 核磁共振陀螺(NMRG) /
- 磁场驱动控制 /
- 数字程控电流源 /
- 低噪声电路建模与分析 /
- 三轴磁场线圈
Abstract:The interaction of the lasers with the alkali metal atoms and inert atoms in the cell is used to maintain nucleon precessional motion in Larmor frequency, the magnetic field-driven technique is used to achieve closed-loop control of air chamber magnetic field, the resonance state of nucleon is kept by compensating the residual magnetism, and then the system angular rate can be sensed, which is the basic theory of nuclear magnetic resonance gyroscope (NMRG). Magnetic field drive technology, which is an important part of the closed-loop control of magnetic field, directly influences the precision and stability of NMRG. In order to solve the key technical problems of insufficient control accuracy and stability of NMRG magnetic field, a voltage-controlled current source of AC/DC separation design is studied to improve the control precision of the magnetic field. In addition, analysis and modeling of the field drive circuit noise based on noise analysis theory are carried out and the experiment is made for verification. The results show that the control precision of the transverse magnetic field of the 3-axis coil is ±0.046 2 nT and the control precision of longitudinal magnetic field is ±0.003 1 nT. The experiment proves that this technical solution has higher engineering application value.
-
表 1 直流电流输出分辨力
Table 1. DC current output resolution
直流幅值控制字 正直流电流/mA 负直流电流/mA 0000 0.001 816 0.001 992 0001 0.002 708 0.001 506 0002 0.003 464 0.000 856 0003 0.004 256 0.000 194 0004 0.005 038 -0.000 434 0005 0.005 828 -0.001 092 0006 0.006 574 -0.001 746 0007 0.007 346 -0.002 424 0008 0.008 094 -0.003 064 0009 0.008 862 -0.003 722 000A 0.009 624 -0.004 378 000B 0.010 404 -0.005 028 000C 0.011 168 -0.005 674 000D 0.011 930 -0.006 328 000E 0.012 712 -0.000 434 000F 0.013 464 -0.001 092  下载: 导出CSV
下载: 导出CSV
表 2 直流电流输出精度
Table 2. DC current output accuracy
理论电流/mA 正实测电流/mA 负实测电流/mA ±0.01 0.010 052 -0.010 106 ±0.02 0.019 991 -0.020 234 ±0.03 0.029 906 -0.029 611 ±3 3.000 17 -2.999 57 ±4 4.000 53 -3.999 46 ±5 5.000 28 -4.999 97 ±16 16.002 7 -15.999 8 ±17 17.002 2 -16.999 3 ±18 18.002 1 -17.999 4
下载: 导出CSV
表 3 主磁场精调直流电流输出精度
Table 3. Accurately DC current output accuracy of main magnetic field
理论电流/mA (精调)实测电流/mA 0.005 0.004 999 6 0.006 0.006 001 9 0.007 0.006 998 7 0.008 0.008 004 3 0.01 0.010 005 6 0.02 0.020 003 7 0.03 0.029 997 9 0.04 0.040 003 2 0.05 0.050 008 7
下载: 导出CSV
表 4 三轴线圈磁场控制精度
Table 4. Accuracy of magnetic field control of three-axis coil
线圈
线圈常数/
(nT·mA-1)电流精度/
mA磁场精度/
nTx轴 30.822 91 ±0.001 5 ±0.046 2 y轴 30.822 91 ±0.001 5 ±0.046 2 z轴 1 187.647 55 ±0.002 6×10-3 ±0.003 1
下载: 导出CSV
-
[1] 秦杰, 汪世林, 高溥泽, 等.核磁共振陀螺技术研究进展[J].导航定位与授时, 2014, 1(2):64-69. doi: 10.3969/j.issn.2095-8110.2014.02.013QIN J, WANG S L, GAO B Z, et al.Advances in nuclear magnetic resonance gyroscope[J].Navigation Positioning & Timing, 2014, 1(2):64-69(in Chinese). doi: 10.3969/j.issn.2095-8110.2014.02.013 [2] LARSEN M S, BULATOWICZ M D.Nuclear magnetic resonance gyroscope: For DARPA's micro-technology for positioning, navigation and timing program[C]//Frequency Control Symposium.Piscataway, NJ: IEEE Press, 2012: 1-5. [3] DONLEY E A.Nuclear magnetic resonance gyroscopes[J].IEEE Sensors, 2010, 143(2):17-22. http://d.old.wanfangdata.com.cn/Periodical/zggxjsxb201603019 [4] ANUDEV J, RAGLEND I J.Analytical study of howland current source model[C]//2012 International Conference on Computing, Electronics and Electrical Technologies (ICCEET).Piscataway, NJ: IEEE Press, 2012: 314-318. [5] 王亚, 李鹏, 徐立军.一种单极性输入双极性输出压控恒流源[J].仪器仪表学报, 2001, 22(3):366-369. http://d.old.wanfangdata.com.cn/Periodical/yqyb2001z2182WANG Y, LI P, XU L J.A new type of voltage control led current source with unipolar input and bipolar output[J]. Chinese Journal of Scientific Instrument, 2001, 22(3):366-369(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/yqyb2001z2182 [6] EKLUND E J.Microgyroscope based on spin-polarized nuclei[D]. Irvine: University of California Irvine, 2008: 41-43. https://www.researchgate.net/publication/234260592_Microgyroscope_based_on_spin-polarized_nuclei [7] 楚中毅, 孙晓光, 万双爱, 等.无自旋交换弛豫原子磁强计的主动磁补偿[J].光学精密工程, 2014, 22(7):1808-1813. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201407015CHU Z Y, SUN X G, WAN S A, et al.Active magnetic compensation of spin-exchange-relaxation-free atomic magnetometer[J].Optics and Precision Engineering, 2014, 22(7):1808-1813(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201407015 [8] 万双爱, 孙晓光, 郑辛, 等.核磁共振陀螺技术发展展望[J].导航定位与授时, 2017, 4(1):7-13. http://d.old.wanfangdata.com.cn/Periodical/dhdwyss201701002WAN S A, SUN X G, ZHENG X, et al.Prospective development of nuclear magnetic resonance gyroscope[J].Navigation Positioning & Timing, 2017, 4(1):7-13(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/dhdwyss201701002 [9] LASER M.Nuclear magnetic resonance and atomic interferometer gyroscopes[C]//Proceedings of the IEEE International Symposium on Inertial Sensors and Systems.Paiscataway, NJ: IEEE Press, 2015: 34-38. [10] XILINX.LogiCORE IP CORDIC[M].4th ed.San Jose: [s.n.], 2011: 4-6. [11] 王雷, 李玉柏, 潘军.CORDIC算法在跟踪环中的应用与FPGA实现[J].通信技术, 2010, 43(7):8-10. http://d.old.wanfangdata.com.cn/Periodical/txjs201007003WANG L, LI Y B, PAN J.Application of CORDIC algorithm in tracking loop and FPGA implemenntation[J].Communications Technology, 2010, 43(7):8-10(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/txjs201007003 [12] HOROWITZ P, HILL W.电子学[M].吴利民, 余国文, 欧阳华, 等, 译.2版.北京: 电子工业出版社, 2017: 106-110.HOROWITZ P, HILL W.The art of electronics[M].WU L M, YU G W, OUYANG H, et al., translated.2nd ed.Beijing: Publishing House of Electronics Industry, 2017: 106-110(in Chinese). [13] AI-OBAIDI A A, MERIBOUT M.A new enhanced Howland voltage controlled current source circuit for EIT applications[C]//2011 IEEE GCC Conference and Exhibition (GCC).Piscataway, NJ: IEEE Press, 2011, 2: 19-22. [14] 庞志锋, 张苏英.电源噪声滤波器设计与应用[J].电子测量技术, 2000, 1(1):28-30. doi: 10.3969/j.issn.1002-7300.2000.01.010PANG Z F, ZHANG S Y.Design and application of a power noise filter[J].China Academic Journal Electronic Publishing House, 2000, 1(1):28-30(in Chinese). doi: 10.3969/j.issn.1002-7300.2000.01.010 [15] HAMMOND G D, SPEAKE C C, STIFF M.Noise analysis of a Howland current source[J].International Journal of Electronics, 2008, 95(4):351-359. doi: 10.1080/00207210801976503 [16] TEXAS I.High precision operational amplifiers OPA277[M].Dallas: [s.n.], 2005: 3-4. -

 下载:
下载:




 点击查看大图
点击查看大图

计量
- 文章访问数: 983
- HTML全文浏览量: 84
- PDF下载量: 597
- 被引次数: 0
