



-
摘要:
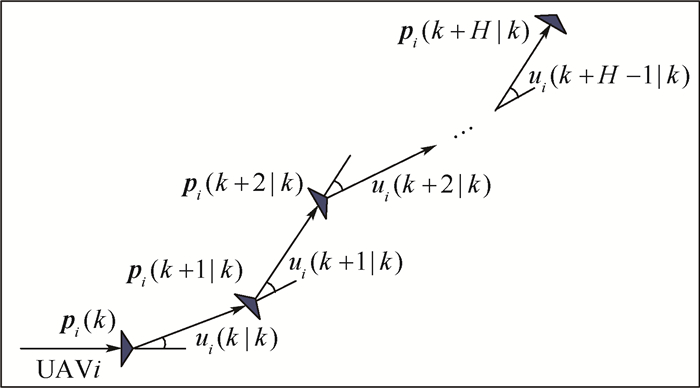
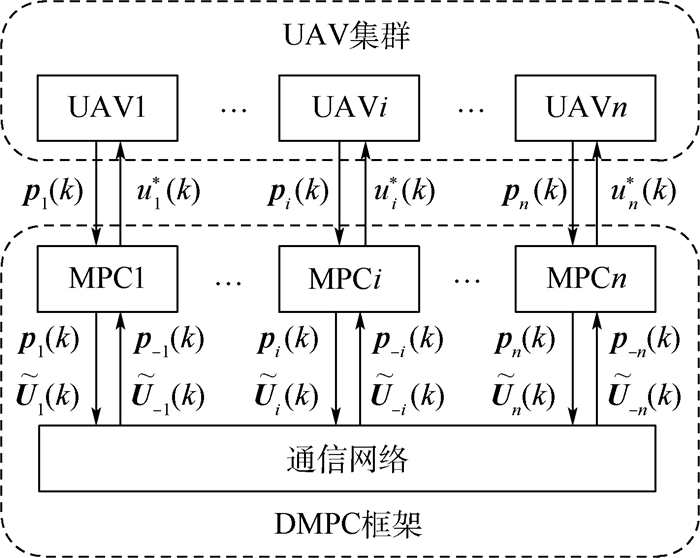
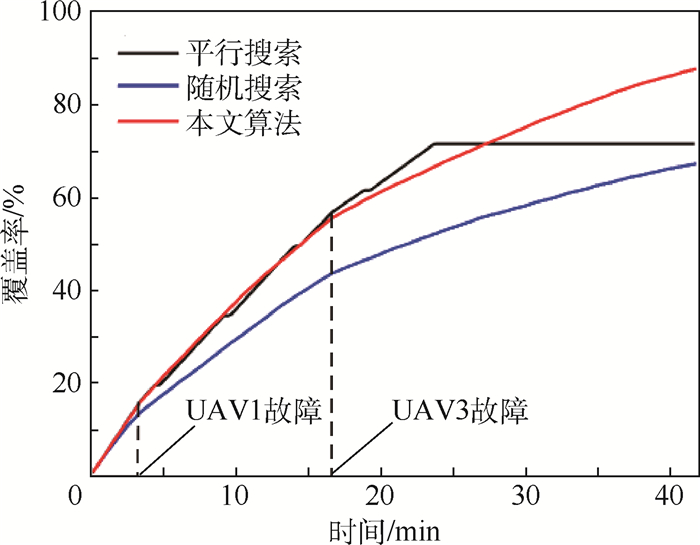
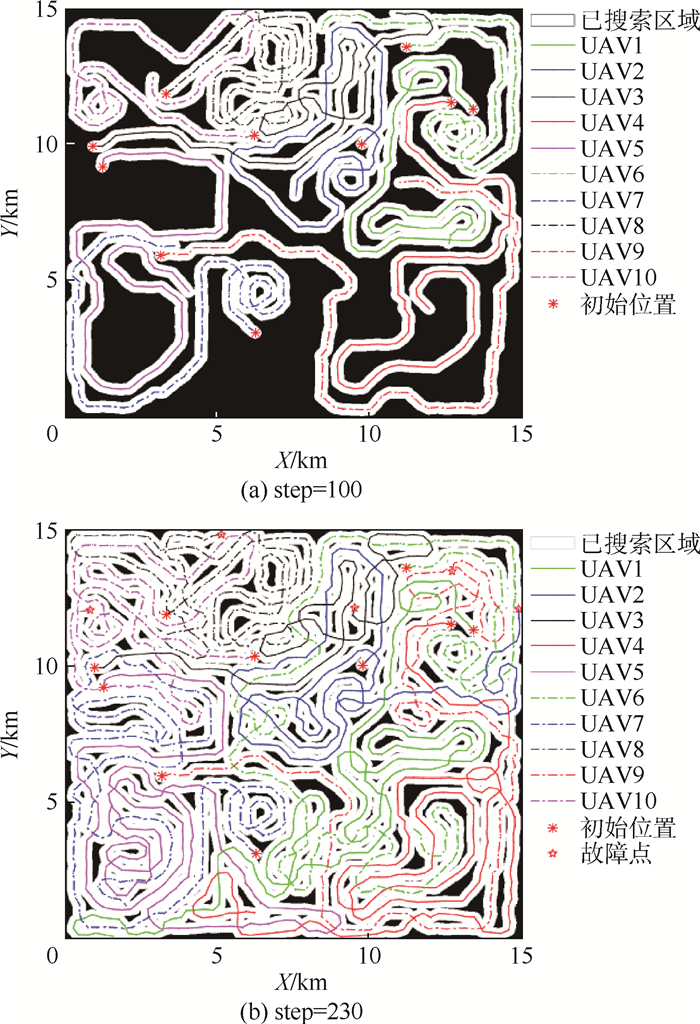
针对无人机集群在无先验信息的未知环境中协同搜索的问题,提出了一种以覆盖率为实时搜索奖励的无人机集群协同区域搜索算法。首先建立覆盖分布地图(CDM)来描述任务环境,并采用Hadamard积实现CDM的快速更新,继而基于CDM计算覆盖率来定量描述实时搜索效果。将无人机集群视为一个控制系统,基于分布式模型预测控制理论建立系统的预测模型,并将预测周期内最大覆盖率增量设为奖励函数,采用差分进化算法进行求解,得到最优解作为系统的最优输入。仿真结果表明,所提算法能够对区域进行覆盖搜索,在出现突发情况时,覆盖率远高于平行搜索方法。
Abstract:Aimed at the problem of cooperative search for UAV swarm in an unknown environment without prior information, a cooperative area search algorithm for UAV swarm with coverage rate as real-time search rewards is proposed. First, coverage distribution map (CDM) is established to describe the mission area, and the rapid update of CDM is realized by using Hadamard product. Then, the coverage rate is calculated based on CDM to describe the search results quantitatively. Considering UAV swarm as a control system, a predictive model of the system is established based on the distributed model predictive control theory, and the maximum increment of coverage rate in the predictive period is determined as a reward function. The optimal solution, as the optimal input of system, is obtained by differential evolution algorithm. Simulation results demonstrate that the proposed algorithm can complete the coverage and search of region effectively. In the event of emergencies, its area coverage rate is much higher than that of the parallel search method.
-
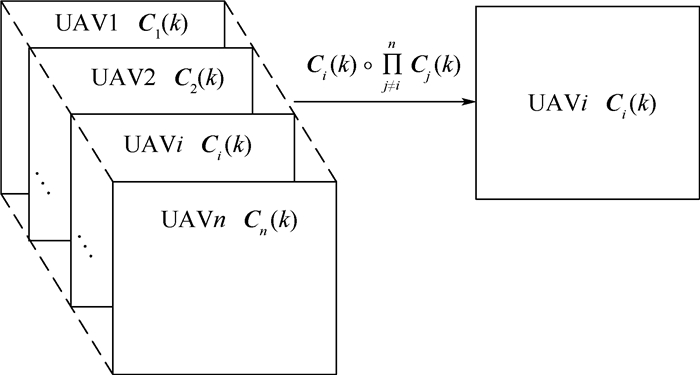
图 6 基于Hadamard积的地图信息融合示意图
Figure 6. Schematic diagram of map information fusion based on Hadamard product
-
[1] HU J W, XU J, XIE L H.Cooperative search and exploration in robotic networks[J]. Unmanned Systems, 2013, 1(1):121-142. doi: 10.1142/S2301385013500064 [2] HU J W, XU J, XIE L H.Vision-based multi-agent cooperative target search[C]//International Conference on Control, Automation, Robotics & Vision.Piscataway, NJ: IEEE Press, 2012: 895-900. [3] 梁晓龙, 孙强, 尹忠海, 等.大规模无人系统集群智能控制方法综述[J].计算机应用研究, 2015, 32(1):11-16. doi: 10.3969/j.issn.1001-3695.2015.01.003LIANG X L, SUN Q, YIN Z H, et al.Review on large-scale unmanned system swarm intelligence control method[J]. Application Research of Computers, 2015, 32(1):11-16(in Chinese). doi: 10.3969/j.issn.1001-3695.2015.01.003 [4] 梁晓龙, 张佳强, 祝捷, 等.基于CPS的空中交通系统架构及能力涌现方法[J].空军工程大学学报(自然科学版), 2016, 17(1):1-7. doi: 10.3969/j.issn.1009-3516.2016.01.001LIANG X L, ZHANG J Q, ZHU J, et al.Air trafic control system architecture and ability emergence method based on cyber-pyhsical system[J]. Journal of Air Force Engineering University(Natural Science Edition), 2016, 17(1):1-7(in Chinese). doi: 10.3969/j.issn.1009-3516.2016.01.001 [5] 吴文超, 黄长强, 宋磊, 等.不确定环境下的多无人机协同搜索航路规划[J].兵工学报, 2011, 32(11):1337-1342.WU W C, HUANG C Q, SONG L, et al.Cooperative search and path planning of multi-unmanned air vehicles in uncertain environment[J]. Acta Armamentarii, 2011, 32(11):1337-1342(in Chinese). [6] ZHAO Z Y, LU G S.Receding horizon control for cooperative search of multi-UAVs based on differential evolution[J]. International Journal of Intelligent Computing and Cybernetics, 2012, 5(1):145-158. doi: 10.1108/17563781211208260 [7] 于驷男, 周锐, 夏洁, 等.多无人机协同搜索区域分割与覆盖[J].北京航空航天大学学报, 2015, 41(1):167-173.YU S N, ZHOU R, XIA J, et al.Decomposition and coverage of multi-UAV cooperative search area[J]. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(1):167-173(in Chinese). [8] JONES P, VACHTSEVANOS G.Multi-unmanned aerial vehicle coverage planner for area surveillance missions[C]//AIAA Guidance, Navigation, and Control Conference and Exhibit.Reston: AIAA, 2007: 1-12. [9] 陈海, 王新民, 焦裕松, 等.一种凸多边形区域的无人机覆盖航迹规划算法[J].航空学报, 2010, 31(9):1802-1808.CHEN H, WANG X M, JIAO Y S, et al.An algorithm of coverage flight path planning for UAVs in convex polygon areas[J]. Acta Aeronautica et Astronautica Sinica, 2010, 31(9):1802-1808(in Chinese). [10] 符小卫, 魏广伟, 高晓光.不确定环境下多无人机协同区域搜索算法[J].系统工程与电子技术, 2016, 38(4):821-827.FU X W, WEI G W, GAO X G.Cooperative area search algorithm for multi-UAVs in uncertainty environment[J]. System Engineering and Elecrtonics, 2016, 38(4):821-827(in Chinese). [11] KHAN A, YANMAZ E, RINNER B.Information exchange and decision making in micro aerial vehicle networks for cooperative search[J]. IEEE Transactions on Control of Network Systems, 2015, 2(4):335-347. doi: 10.1109/TCNS.2015.2426771 [12] 杜继永, 张凤鸣, 毛红保, 等.多UAV协同搜索的博弈论模型及快速求解方法[J].上海交通大学学报, 2013, 47(4):667-678.DU J Y, ZHANG F M, MAO H B, et al.Game theory based mutli-UAV cooperative searching model and fast solution approach[J]. Journal of Shanghai Jiao Tong University, 2013, 47(4):667-678(in Chinese). [13] TRODDEN P, RICHARDS A.Multi-vehicle cooperative search using distributed model predictive control[C]//Guidance, Navigation, and Control Conference and Exhibit.Reston: AIAA, 2008: 1-11. [14] 彭辉, 沈林成, 朱华勇.基于分布式模型预测控制的多UAV协同区域搜索[J].航空学报, 2010, 31(3):593-601.PENG H, SHEN L C, ZHU H Y.Multiple UAV cooperative area search based on distributed model predictive control[J]. Acta Aeronautica et Astronautica Sinica, 2010, 31(3):593-601(in Chinese). [15] 郑宏捷.无人机区域侦察航路规划研究[D].长沙: 国防科学技术大学, 2011: 5-8.ZHENG H J.Investigation on the UAV path planning problem of area reconnaissance[D]. Changsha: National University of Defense Technology, 2011: 5-8(in Chinese). [16] 刘重, 高晓光, 符小卫.带信息素回访机制的多无人机分布式协同目标搜索[J].系统工程与电子技术, 2017, 39(9):1998-2011.LIU C, GAO X G, FU X W.Multi-UAVs distributed cooperative target search algorithm with controllable revisit mechanism based on digital pheromone[J]. System Engineering and Electronics, 2017, 39(9):1998-2011(in Chinese). [17] MAYNE D Q.Model predictive control:Recent developments and future promise[J]. Automatica, 2014, 50(12):2967-2986. doi: 10.1016/j.automatica.2014.10.128 [18] KAYACAN E, PESCHEL J M, KAYACAN E.Centralized, decentralized and distributed nonlinear model predictive control of a tractor-trailer system: A comparative study[C]//2016 American Control Conference.Piscataway, NJ: IEEE Press, 2016: 4403-4408. [19] MANSOURI S S, NIKOLAKOPOULOS G, GUSTAFSSON T.Distributed model predictive control for unmanned aerial vehicles[C]//2015 Workshop on Research, Education and Development of Unmanned Aerial Systems.Piscataway, NJ: IEEE Press, 2015: 152-161. [20] DAS S, MULLICK S S, SUGANTHAN P N.Recent advances in differential evolution-An updated survey[J]. Swarm and Evolutionary Computation, 2016, 27:1-29. doi: 10.1016/j.swevo.2016.01.004 -

 下载:
下载:







 点击查看大图
点击查看大图
计量
- 文章访问数: 1580
- HTML全文浏览量: 166
- PDF下载量: 647
- 被引次数: 0
