



-
摘要:
针对弹性高速飞行器非线性、不确定性和刚体/弹性耦合的特点,提出了一种基于QR分解和滚动时域估计的状态/参数联合估计方法。首先,通过引入滚动时域策略,将状态/参数估计问题转化为固定变量数目的优化问题,能够较好地处理时变参数的估计问题。然后,利用前向动态规划原理,将到达代价的计算转化为最小二乘问题,并利用QR分解进行求解,从而给出了基于QR分解的到达代价更新方法。这样使得整个滚动时域估计方法都建立在优化的基础上,且引入了反馈机制,提高了估计精度和速度。仿真结果表明:滚动时域估计的精度明显优于扩展卡尔曼滤波,且基于QR分解的到达代价更新方法在速度上优于传统的基于估计误差协方差的到达代价更新方法。
Abstract:Considering the nonlinearity, uncertainty and rigid/elastic coupling of elastic hypersonic vehicles, a state/parameter joint estimation method based on QR decomposition and moving horizon estimation is proposed. First, this method transforms the state/parameter estimation problem into an optimization problem with fixed-number variables by introducing moving horizon strategy, and it can deal with the time-varying parameter estimation better than Kalman filter. Second, by utilizing the forward dynamic programming principle, the computation of arrival-cost is converted into a least-square problem that is solved by QR decomposition, and the arrival-cost update algorithm based on QR decomposition is given. In this way, the moving horizon estimation is based on optimization, and the feedback mechanism is introduced to improve the estimation accuracy and speed. The simulation results demonstrate that the accuracy of moving horizon estimation is obviously higher than that of extended Kalman filter, and the arrival-cost update strategy based on QR decomposition is better than the traditional arrival-cost update method based on the estimated error covariance in speed.
-
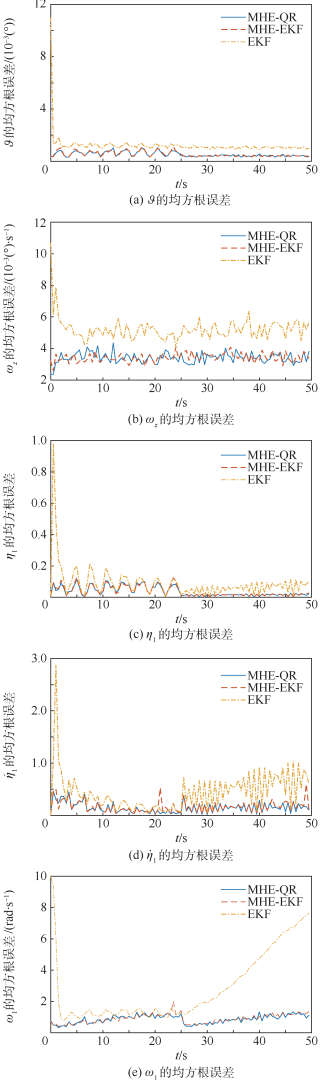
图 2 EKF、MHE-EKF和MHE-QR方法估计结果的均方根误差
Figure 2. RMSE of estimation results of EKF, MHE-EKF and MHE-QR methods
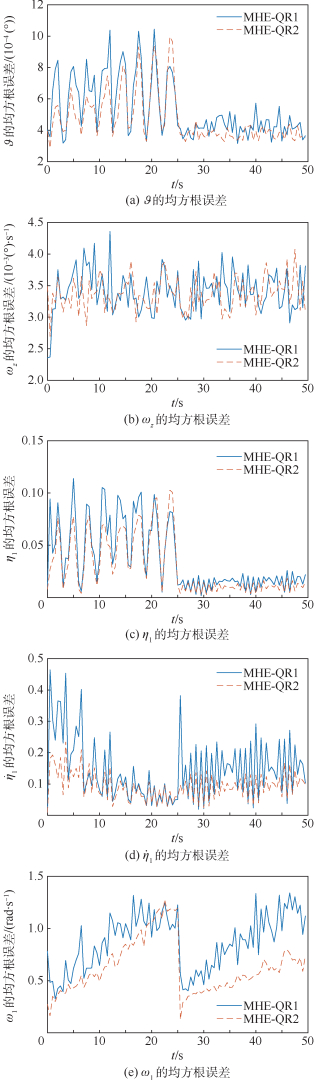
图 3 不同方案时MHE-QR方法估计结果的均方根误差
Figure 3. RMSE of estimation results of different schemes using MHE-QR method
表 1 不同方法估计结果的均方根误差均值
Table 1. Average RMSE mean values of estimation results of different methods
方法 RMSE 
ωz/(10-3(°)· s-1) η1 
ω1/ (rad·s-1) MHE-QR1 0.536 3.4 0.037 7 0.15 0.87 MHE-QR2 0.472 3.3 0.029 6 0.097 0.62 MHE-EKF 0.548 3.4 0.039 0 0.17 0.90 EKF 1.2 5.2 0.088 3 0.47 2.86 MHE-S 3.2 5.7 0.39 1.41 EKF-S 3.5 7.0 0.37 2.47  下载: 导出CSV
下载: 导出CSV
表 2 不同方法的计算耗时
Table 2. Run time of different methods
方法 平均时间/(10-2 s) 最大时间/(10-2 s) MHE-QR1 2.44 4.74 MHE-QR2 2.35 4.78 MHE-EKF 2.48 7.56 EKF 0.66 1.27
下载: 导出CSV
-
[1] 张超凡, 宗群, 董琦, 等.高超声速飞行器模型及控制若干问题综述[J].信息与控制, 2017, 46(1):90-102.ZHANG C F, ZONG Q, DONG Q, et al.A survey of models and control problems of hypersonic vehicles[J].Information and Control, 2017, 46(1):90-102(in Chinese). [2] 张伸, 王青, 董朝阳, 等.基于跟踪微分器的高超声速飞行器减步控制[J].北京航空航天大学学报, 2017, 43(10):2054-2062.ZHANG S, WANG Q, DONG C Y, et al.Reduced step control of hypersonic vehicle based on tracking differentiator[J].Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(10):2054-2062(in Chinese). [3] 赵贺伟, 杨秀霞, 沈如松, 等.弹性高超声速飞行器预设性能精细姿态控制[J].兵工学报, 2017, 38(3):501-511. doi: 10.3969/j.issn.1000-1093.2017.03.012ZHAO H W, YANG X X, SHEN R S, et al.Prescribed perfor-mance fine attitude control for aeroelastic hypersonic vehicle[J].Acta Armamentarii, 2017, 38(3):501-511(in Chinese). doi: 10.3969/j.issn.1000-1093.2017.03.012 [4] 吴云洁, 宋嘉赟, 刘晓东, 等.推力矢量防空导弹伺服弹性的抑制[J].北京航空航天大学学报, 2013, 39(11):1480-1485.WU Y J, SONG J Y, LIU X D, et al.Suppression of aeroservoelasticity in anti-aircraft missile using thrust vector[J].Journal of Beijing University of Aeronautics and Astronautics, 2013, 39(11):1480-1485(in Chinese). [5] ABDOLLAHPOURI M, TAKACS G, ROHAL-ILKIV B.Real-time moving horizon estimation for a vibrating active cantilever[J].Mechanical Systems and Signal Processing, 2017, 86(A):1-15. [6] 焦志强, 李卫华, 王鹏.基于多模型与滚动时域估计的机动目标跟踪算法[J].空军工程大学学报(自然科学版), 2016, 17(2):15-20. doi: 10.3969/j.issn.1009-3516.2016.02.004JIAO Z Q, LI W H, WANG P.A multi-model method of tracking maneuvering target based on multiple model and moving horizon estimation[J].Journal of Air Force Engineering University(Natural Science Edition), 2016, 17(2):15-20(in Chinese). doi: 10.3969/j.issn.1009-3516.2016.02.004 [7] RAO C V, RAWLINGS J B, LEE J H.Constrained linear state estimation-A moving horizon approach[J].Automatica, 2001, 37(10):1619-1628. doi: 10.1016/S0005-1098(01)00115-7 [8] 陈伟, 孙传杰, 冯高鹏, 等.基于滚动时域优化的旋转弹解耦控制器设计[J].北京航空航天大学学报, 2018, 44(4):717-724.CHEN W, SUN C J, FENG G P, et al.Design of decoupling controller for spinning missile based on receding horizon optimal[J].Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(4):717-724(in Chinese). [9] RAO C V, RAWLINGS J B, MAYNE D Q.Constrained state estimation for nonlinear discrete-time systems:Stability and moving horizon approximations[J].IEEE Transactions on Automa-tic Control, 2003, 48(2):246-258. doi: 10.1109/TAC.2002.808470 [10] KUHL P, DIEHL M, KRAUS T, et al.A real-time algorithm for moving horizon state and parameter estimation[J].Computers and Chemical Engineering, 2011, 35(1):71-83. doi: 10.1016-j.compchemeng.2010.07.012/ [11] VAN DER STEEN J, DIEHL M, AERTS C, et al.Spacecraft attitude estimation and sensor calibration using moving horizon estimation[J].Journal of Guidance, Control, and Dynamics, 2013, 36(3):734-742. [12] LIU A D, ZHANG W A, CHEN Z Q, et al.Moving horizon estimation for mobile robots with multirate sampling[J].IEEE Transactions on Industrial Electronics, 2017, 64(2):1457-1467. doi: 10.1109/TIE.2016.2611458 [13] 焦志强, 李卫华, 王鹏.基于量测补偿的多传感器分布式滚动时域估计[J].系统工程与电子技术, 2017, 39(5):984-990.JIAO Z Q, LI W H, WANG P.Distributed moving horizon estimation for multi-sensors system based on measurements compensation[J].System Engineering and Electronics, 2017, 39(5):984-990(in Chinese). [14] GAO W, YANG J, LIU J, et al.Moving horizon estimation for cooperative localization with communication delay[J].The Journal of Navigation, 2015, 68(3):493-510. [15] 赵国荣, 黄婧丽, 苏艳琴, 等.基于滚动时域估计的飞行器姿态估计及三轴磁强计在线校正[J].物理学报, 2015, 64(21):210502. doi: 10.7498/aps.64.210502ZHAO G R, HUANG J L, SU Y Q, et al.Attitude estimation and three-axis magnetometer on-line calibration based on moving horizon estimation[J].Acta Physica Sinica, 2015, 64(21):210502(in Chinese). doi: 10.7498/aps.64.210502 [16] QU C C, HAHN J.Computation of arrival cost for moving horizon estimation via unscented Kalman filtering[J].Journal of Process Control, 2009, 19(2):358-363. doi: 10.1016/j.jprocont.2008.04.005 [17] 孟中杰, 闫杰.高超声速弹性飞行器振动模态自适应抑制技术[J].宇航学报, 2011, 32(10):2164-2168. doi: 10.3873/j.issn.1000-1328.2011.10.011MENG Z J, YAN J.Adaptive modal suppression for hypersonic aeroelastic vehicler[J].Journal of Astronautics, 2011, 32(10):2164-2168(in Chinese). doi: 10.3873/j.issn.1000-1328.2011.10.011 [18] FIORENTINI L, SERRANI A, BOLENDER M A, et al.Nonlinear robust adaptive control of flexible air-breathing hypersonic vehicles[J].Journal of Guidance, Control, and Dynamics, 2009, 32(2):401-416. doi: 10.2514/1.39210 [19] SANCHEZ Z, MURILLO M, GIOVANINI L.Adaptive arrival cost update for improving moving horizon estimation performance[J].ISA Transactions, 2017, 68:54-62. doi: 10.1016/j.isatra.2017.02.012 -

 下载:
下载:

 点击查看大图
点击查看大图

计量
- 文章访问数: 796
- HTML全文浏览量: 141
- PDF下载量: 347
- 被引次数: 0
