



Visual guidance algorithm design for autonomous landing based on two points in space
-
摘要:
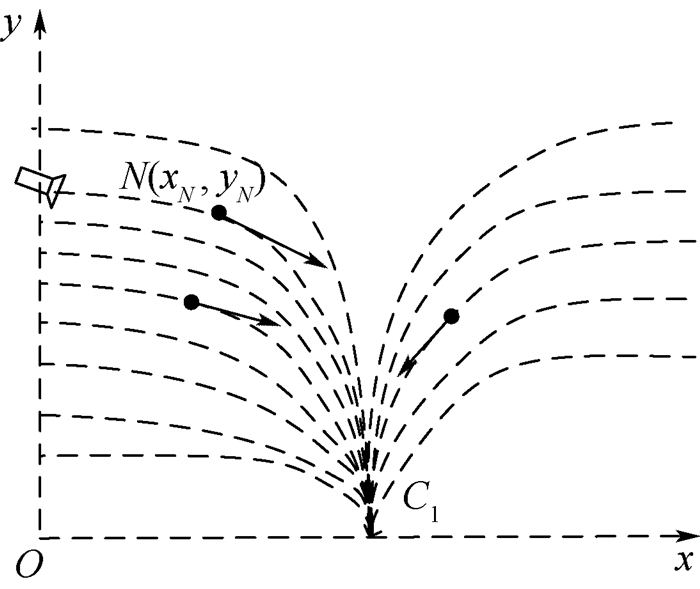
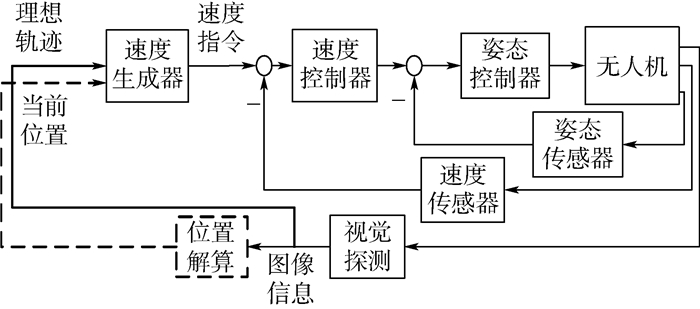
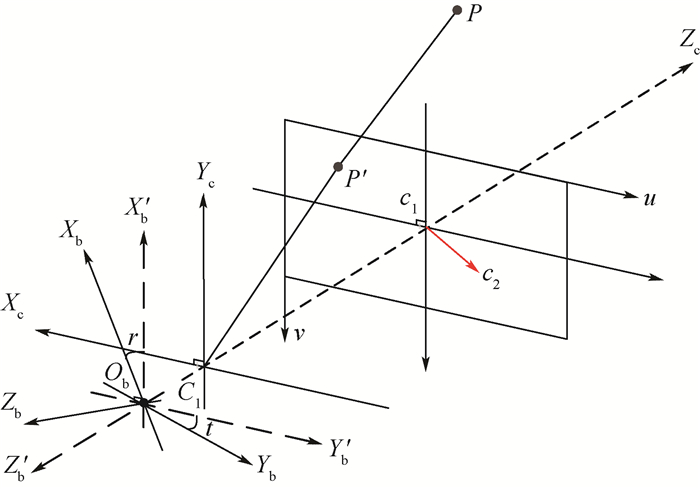
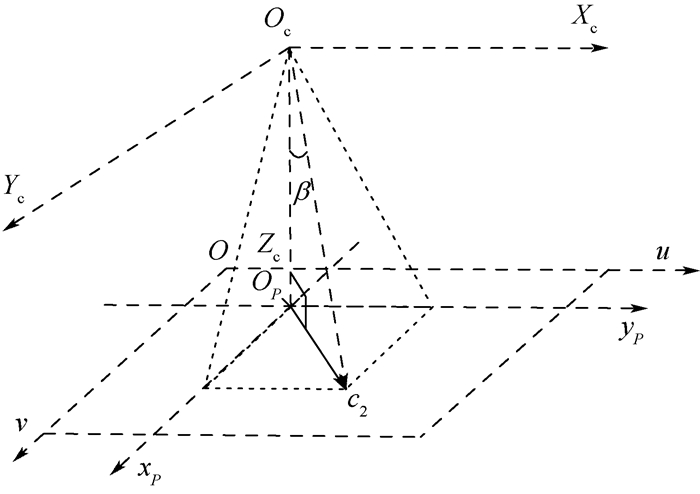
为提高无人机着陆效率,从着陆速度向量场和导引律设计两方面研究改进。首先,基于椭圆设计速度向量场,实现飞行路程更短、机动性能要求更低的着陆轨迹。然后,基于像素坐标系与机体坐标系的关系,设计无人机的航迹方位角指令;以椭圆切线方向为参考,结合合作矢量特征,设计航迹倾斜角指令;利用图像信息,设计速度大小指令。最后,理论比较了传统轨迹与提出轨迹对方向机动性性能的要求,给出了轨迹参数与无人机方向机动性性能的关系。利用Simulink搭建系统仿真平台,计算满足要求的合作矢量特征。结果表明,无人机以曲线轨迹准确软着陆到目标,满足实际运用的需要。
-
关键词:
- 垂直起降无人机(VTOL UAV) /
- 自主着陆 /
- 视觉导引律 /
- 速度向量场 /
- 方向机动性能
Abstract:In order to increase the landing efficiency, improvements are made in two aspects:landing velocity vector field and guidance law design. Landing velocity vector field is designed based on ellipse curve for the requirements of shorter flight path and less maneuverability. Meanwhile, the flight path azimuth angle command is generated based on the relationship between the image coordinate system and the body-fixed frame. With reference to the tangential direction of the ellipse, the flight path elevation angle is tuned and combined with the cooperative vector features. Speed command is calculated using image information. Finally, the requirements of the traditional trajectory and the proposed trajectory on the directional maneuverability are compared in theory. The relationship between the trajectory parameters and the UAV turning performance is then shown. The system simulation platform is built based on Simulink, and the required cooperative vector is calculated. The results show that the UAV accurately lands on the target with curved trajectory, which meets the needs in practical applications.
-

图 4 机体坐标系与像素坐标系的关系示意图
Figure 4. Schematic diagram of relationship between body coordinate system and image coordinate system

图 5 无人机与合作特征的空间关系
Figure 5. Spatial relationship between UAV and cooperative characteristics

图 6 β与图像信息之间的关系示意图
Figure 6. Schematic diagram of relationship between β and image information
-
[1] LIN S, GARRATT M A, LAMBERT A J.Monocular vision-based real-time target recognition and tracking for autonomously landing an UAV in a cluttered shipboard environment[J]. Autonomous Robots, 2017, 41(4):881-901. doi: 10.1007/s10514-016-9564-2 [2] ARAAR O, AOUF N, VITANOV I.Vision based autonomous landing of multirotor UAV on moving platform[J]. Journal of Intelligent & Robotic Systems, 2017, 85(2):369-384. doi: 10.1007/s10846-016-0399-z [3] SHIRZADEH M, ASL H J, AMIRKHANI A, et al.Vision-based control of a quadrotor utilizing artificial neural networks for tracking of moving targets[J]. Engineering Applications of Artificial Intelligence, 2017, 58:34-48. doi: 10.1016/j.engappai.2016.10.016 [4] PRAKASH R O, SARAVANAN C.Autonomous robust helipad detection algorithm using computer vision[C]//International Conference on Electrical, Electronics, and Optimization Techniques.Piscataway, NJ: IEEE Press, 2016: 2599-2604. [5] TANG D, CHEN Y, KOU K.Navigation method based on the solution to PnP problem for autonomous landing of UAV[C]//Proceedings of 2014 IEEE Chinese Guidance, Navigation and Control Conference.Piscataway, NJ: IEEE Press, 2014, 2315-2320. [6] 陈茂武.基于视觉的无人机自动着陆导航技术与系统研究[D].南京: 南京航空航天大学, 2017. http://cdmd.cnki.com.cn/Article/CDMD-10287-1017876045.htmCHEN M W.Research on vision based automatic landing guidance technology and system for UAVs[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2017(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10287-1017876045.htm [7] MINGU K, YOUDAN K.Multiple UAVs nonlinear guidance laws for stationary target observation with waypoint incidence angle constraint[J]. International Journal of Aeronautical and Space Sciences, 2013, 14(1):67-74. doi: 10.5139/IJASS.2013.14.1.67 [8] MINGU K, YOUDAN K.Error dynamics-based Lyapunov guidance law for stationary target observation[J]. IFAC Proceedings Volumes, 2011, 44(1):2042-2047. doi: 10.3182/20110828-6-IT-1002.00129 [9] MEDEIROS F L L, GOMES V C F, AQUINO M R C D, et al.A computer vision system for guidance of vtol uavs autonomous landing[C]//2015 Brazilian Conference on Intelligent Systems(BRACIS).Piacataway, NJ: IEEE Press, 2015: 333-338. [10] YANG S, SCHERER S A, ZELL A.An onboard monocular vision system for autonomous takeoff, hovering and landing of a micro aerial vehicle[J]. Journal of Intelligent & Robotic Systems, 2013, 69(1-4):499-515. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=5df7158da01f5eecad7481fdf8555d08 [11] GAUTAM A, SUJIT P B, SARIPALLI S.A survey of autonomous landing techniques for UAVs[C]//International Conference on Unmanned Aircraft Systems.Piscataway, NJ: IEEE Press, 2014: 1210-1218. [12] JUNG W, LIM S, LEE D, et al.Unmanned aircraft vector field path following with arrival angle control[J]. Journal of Intelligent & Robotic Systems, 2016, 84(1-4):311-325. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=c58b520a7d5c09c1266009e2a38a463e [13] MIN B M, TAHK M J, SHIM D H, et al.Guidance law for vision-based automatic landing of UAV[J]. International Journal of Aeronautical and Space Sciences, 2007, 8(1):46-53. doi: 10.5139/IJASS.2007.8.1.046 [14] 牛轶峰, 凌黎华.无人机规避或跟踪空中目标的自适应运动导引方法[J].国防科技大学学报, 2017, 39(4):116-124. http://d.old.wanfangdata.com.cn/Periodical/gfkjdxxb201704018NIU Y F, LING L H.Adaptive motion guidance method of avoiding or tracking aerial targets for unmanned aerial vehicles[J]. Journal of National University of Defense Technology, 2017, 39(4):116-124(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/gfkjdxxb201704018 [15] RATNOO A, GHOSE D.Impact angle constrained guidance against nonstationary nonmaneuvering targets[J]. Journal of Guidance, Control, and Dynamics, 2010, 33(1):269-275. http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ0216024929/ [16] LEE H, JUNG S, SHIM D H.Vision-based UAV landing on the moving vehicle[C]//2016 International Conference on Unmanned Aircraft Systems(Icuas).Piscataway, NJ: IEEE Press, 2016: 1-7. [17] CHU H P, MA L, SHAO Z J.Trajectory optimization and online re-planning for vertical takeoff vertical landing on lunar surface[C]//Proceedings of 2016 IEEE Chinese Guidance, Navigation and Control Conference.Piscataway, NJ: IEEE Press, 2016: 2999-3004. [18] 张炳亮.基于三维合作目标的视觉探测与导引算法研究[D].南京: 南京航空航天大学, 2017. http://cdmd.cnki.com.cn/Article/CDMD-10287-1017875076.htmZHANG B L.Research on visual detection and guidance algorithm based on 3D cooperative target[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2017(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10287-1017875076.htm -

 下载:
下载:








 点击查看大图
点击查看大图

计量
- 文章访问数: 852
- HTML全文浏览量: 60
- PDF下载量: 296
- 被引次数: 0
