



-
摘要:
光电二极管作为体积小、成本低的太阳敏感器,可以结合地球敏感器进行卫星三轴姿态估计,但是地球反照光对其具有严重的影响,从而限制了其应用,然而地球反照光数学模型应用复杂。针对此问题,首先建立了一种简化的光电二极管量测模型,将地球反照光设成动态偏置项补偿在光电二极管模型中,并将误差建模为混合高斯噪声。然后应用滑窗估计和随机权重策略动态估计和更新模型中的参数。同时,采用多比例因子分别估计各光电二极管的地球反照光影响,并引入Huber影响函数处理异常值,从而提高了算法鲁棒性和参数估计精度。实验结果表明,采用地球反照光校正的光电二极管量测模型和无迹卡尔曼滤波(UKF)算法可实现卫星的高精度姿态估计,三轴姿态精度能达到0.2°~0.3°。
Abstract:As a small and low-cost sun sensor, the photodiode, combined with the earth sensor, can determinate full three-axis satellite attitude. However, the photodiode is sensitive to the surrounding light sources, such as the earth, which limits its application. The mathematical model of the earth's albedo is complicated. To solve this problem, a simplified measurement model of the photodiode, describing the effects of the earth's albedo as the dynamic bias and deviation as the mixed-Gaussian noise, is established first. Then parameters in the model are online estimated and updated with windowing and random weighting strategies. To improve the accuracy of the parameter estimation and robustness of the algorithm, the multi-scale factors are used to estimate the influence of albedo on each photodiode, and the Huber function is introduced to prevent the outliers. The experimental results show that the high-precision satellite attitude estimation can be achieved by the new measurement model and the unscented Kalman filter (UKF) algorithm, and the three-axis attitude accuracy can arrive at 0.2°-0.3°.
-
Key words:
- photodiodes /
- earth's albedo /
- mixed-Gaussian noise /
- multi-scale factors /
- Huber function
-

图 2 滑窗估计和随机权重算法示意图
Figure 2. Schematic diagram of sliding window estimation and random weighting algorithm

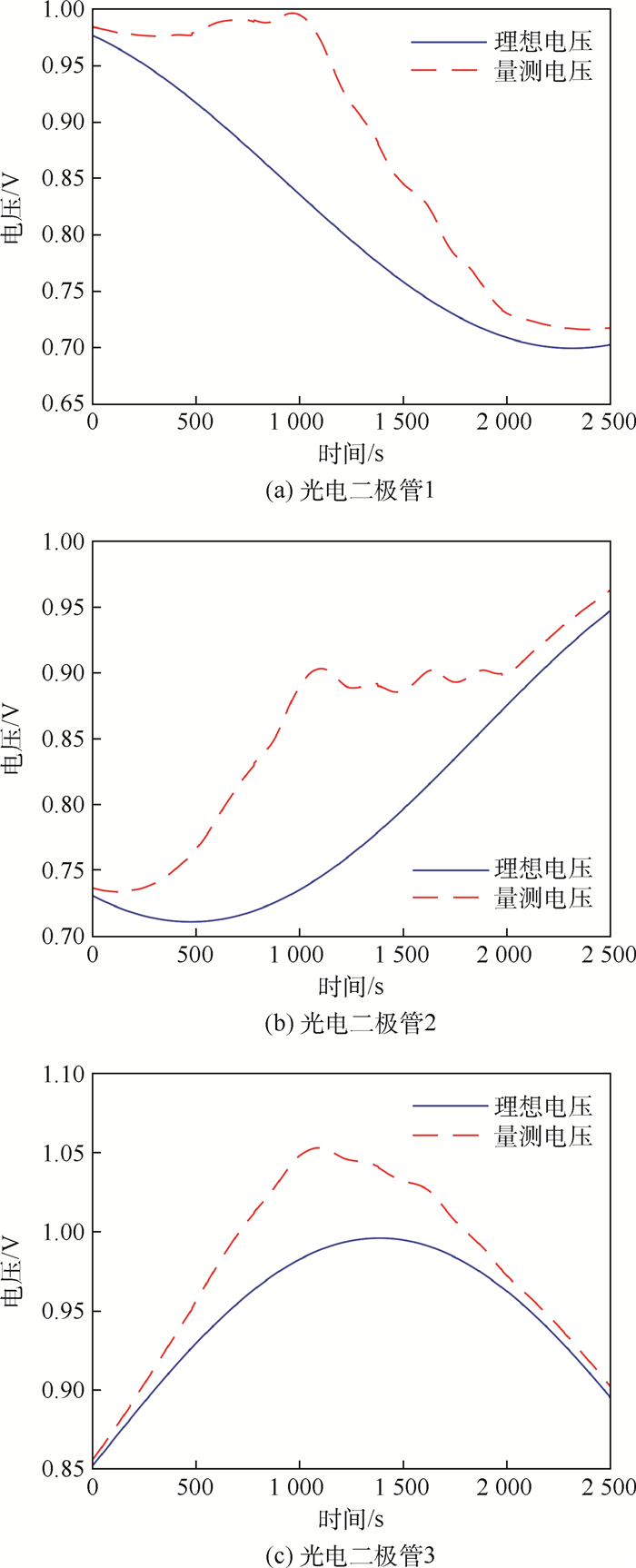
图 3 光电二极管1、2和3的理想电压与量测电压对比
Figure 3. Comparison of ideal voltage and measured voltage for photodiode 1, 2 and 3

图 4 卫星三轴姿态估计误差对比
Figure 4. Comparison of satellite three-axis attitude estimation error
表 1 光电二极管偏置估计误差RMS
Table 1. RMS of photodiode bias estimation error
mV 权重选取策略 光电二极管1 光电二极管2 光电二极管3 固定权重 3.18 3.46 1.53 残差模值 2.97 2.95 1.46 Huber模值 2.90 2.88 1.48 本文方法 2.24 2.79 1.13  下载: 导出CSV
下载: 导出CSV
-
[1] POST M A, LI J Q, LEE R. A low-cost photodiode sun sensor for CubeSat and planetary microrover[J]. International Journal of Aerospace Engineering, 2013, 2013:549080. [2] UNHELKAR V V, HABLANI H B.Spacecraft attitude determination with sun sensors, horizon sensors and gyros:Comparison of steady-state Kalman filter and extended Kalman filter[M].Advances in Estimation, Navigation, and Spacecraft Control.Berlin:Springer, 2015:413-437. [3] GARCIA R V, KUGA H K, ZANARDI M C F P S.Unscented Kalman filter applied to the spacecraft attitude estimation with euler angles[J].Mathematical Problems in Engineering, 2012, 2012:985429. http://d.old.wanfangdata.com.cn/OAPaper/oai_doaj-articles_a0f2c789902e2d68bc5aaa67d40c5ee4 [4] FLATLEY T W, MOORE W A.An earth albedo model: A mathematical model for the radiant energy input to an orbiting spacecraft due to the diffuse reflectance of solar radiation from the Earth below: NASA-TM-104596[R].Washington, D.C., NASA, 1994. [5] APPEL P.Attitude estimation from magnetometer and earth-albedo-corrected coarse sun sensor measurements[J].Acta Astronautica, 2005, 56(1-2):115-126. doi: 10.1016/j.actaastro.2004.09.001 [6] 韩柯, 金仲和, 王昊.基于太阳能电池板的皮卫星最优姿态确定算法[J].浙江大学学报(工学版), 2010, 44(9):1719-1723. doi: 10.3785/j.issn.1008-973X.2010.09.015HAN K, JIN Z H, WANG H.Optimal attitude determination method forpico-atellite using solar panels[J].Journal of Zhejiang University(Engineering Science), 2010, 44(9):1719-1723(in Chinese). doi: 10.3785/j.issn.1008-973X.2010.09.015 [7] BHANDERI D D V.Spacecraft attitude determination with earth albedo corretted sun sensor measurements[M].Aalborg:Aalborg University, 2005. [8] HAAVE H R.Simulating sun vector estimation and finding gyroscopes for the NUTS project[D].Trondheim: Norwegian University of Science and Technology, 2016. [9] JULIER S J, UHLMANN J K.Unscented filtering and nonlinear estimation[J].Proceedings of the IEEE, 2004, 92(3):401-422. doi: 10.1109/JPROC.2003.823141 [10] O'KEEFE S A, SCHAUB H.Consider-filter-based on-orbit coarse sun sensor calibration sensitivity[J].Journal of Guidance, Control, and Dynamics, 2016, 40(5):1300-1303. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=d62f4cad78c93162bb0dbfe064b4a404 [11] GAO S, HU G, ZHONG Y.Windowing and random weighting-based adaptive unscented Kalman filter[J].International Journal of Adaptive Control and Signal Processing, 2015, 29(2):201-223. doi: 10.1002/acs.v29.2 [12] MASRELIEZ C, MARTIN R.Robust Bayesian estimation for the linear model and robustifying the Kalman filter[J].IEEE transactions on Automatic Control, 1977, 22(3):361-371. doi: 10.1109/TAC.1977.1101538 [13] 章仁为.卫星轨道姿态动力学与控制[M].北京:北京航空航天大学出版社, 1998:157-176.ZHANG R W.Satellite dynamics and control of spacecraft[M].Beijing:Beihang University Press, 1998:157-176(in Chinese). [14] KIM S G, CRASSIDIS J L, CHENG Y, et al.Kalman filtering for relative spacecraft attitude and position estimation[J].Journal of Guidance, Control, and Dynamics, 2007, 30(1):133-143. doi: 10.2514/1.22377 [15] FARRENKOPF R L.Analytic steady-state accuracy solutions for two common spacecraft attitude estimators[J].Journal of Guidance, Control, and Dynamics, 1978, 1(4):282-284. doi: 10.2514/3.55779 [16] ZANETTI R, DEMARS K J.Fully multiplicative unscented kalman filter for attitude estimation[J].Journal of Guidance, Control, and Dynamics, 2017, 41(5):1183-1189. [17] 秦永元, 张洪钺, 汪叔华.卡尔曼滤波与组合导航原理[M].西安:西北工业大学出版社, 2015:33-57.QIN Q Y, ZHANG H Y, WANG S H.Kalman filtering and integrated navigation principle[M].Xi'an:Northwestern Polytechnical University Press, 2015:33-57(in Chinese). [18] MARKLEY F L, MORTARI D.Quaternion attitude estimation using vector observations[J].Journal of the Astronautical Sciences, 2000, 48(2):359-380. http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ026104557/ -

 下载:
下载:




 点击查看大图
点击查看大图

计量
- 文章访问数: 564
- HTML全文浏览量: 115
- PDF下载量: 416
- 被引次数: 0
