



-
摘要:
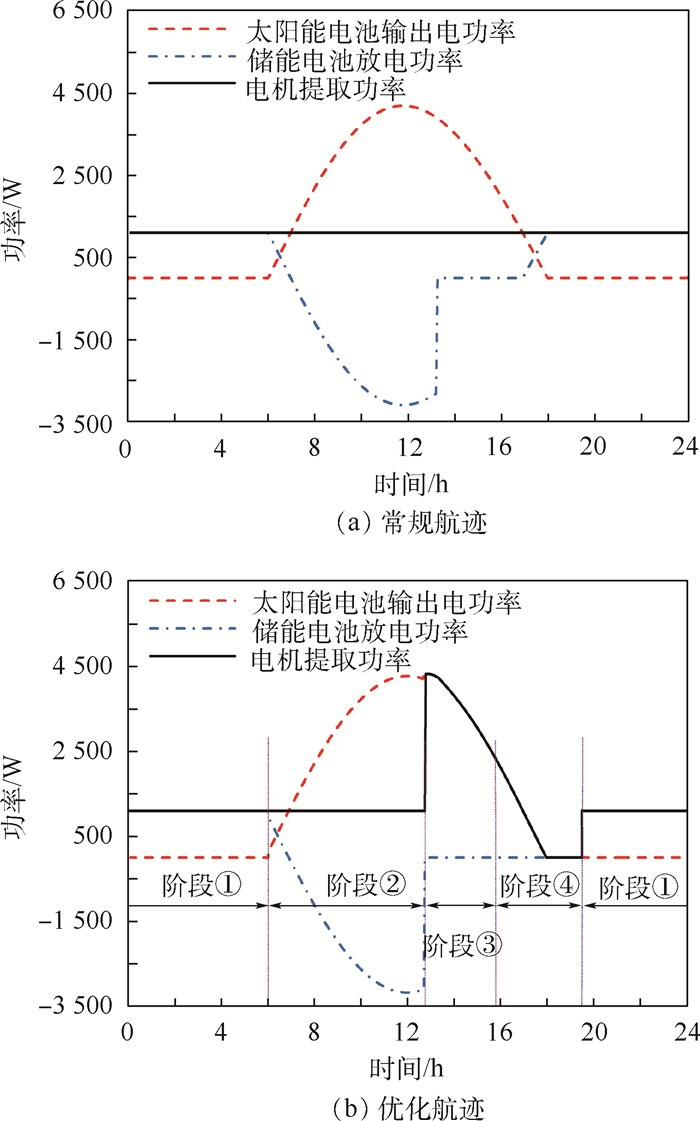
为提升高空太阳能无人机的飞行性能和载荷能力,综合考虑无人机运动状态和能量获取、存储、消耗之间的耦合关系,建立了三维航迹优化模型。采用高斯伪谱法在离散点上近似状态变量和控制变量,且在一系列配点上满足动力学方程的约束,将最优控制问题转化为非线性规划问题。针对典型的点到点飞行任务开展了航迹优化,并与常规定高定速航迹进行了对比。结果表明:通过调整飞行姿态,可以使高空太阳能无人机的净吸收能量提高9.2%;综合调整飞行姿态和改变飞行高度两种措施可以获得更大的能量优势,使储能电池剩余电量提高18.8%。
Abstract:In order to enhance the flight performance and load capacity of high-altitude solar-powered UAV, a three-dimensional optimal path planning model that examines the interaction between flight status, energy acquisition, storage, and consumption was established. The Gauss pseudo-spectral method was employed to transform the optimal control problem into a nonlinear programming problem through approximating the state variables and control variables on discrete points and satisfying the constraints of dynamic equations on a set of collocation points. Then optimization and simulation were carried out for a typical point-to-point mission and the optimum path was compared with current constant-altitude constant-velocity path. The results indicate that appropriate changes of flight attitude angle increase the net energy of solar-powered UAV by 9.2%. By comprehensive utilization of changing flight attitude angle and flight altitude, the proposed optimum path brings more energy profits, which improves the battery pack final state of charge by 18.8%.
-
Key words:
- solar-powered UAV /
- optimal path planning /
- solar cell /
- battery pack /
- Gauss pseudo-spectral method
-

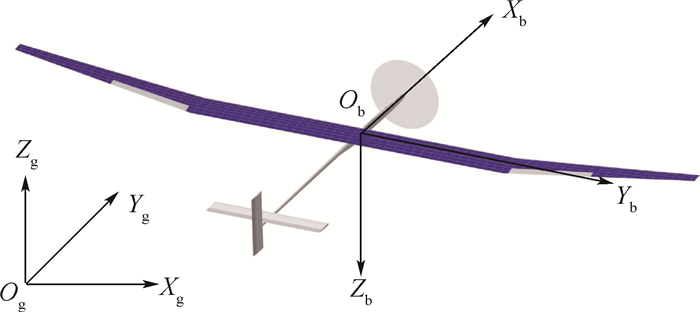
图 1 地面坐标系和机体坐标系示意图
Figure 1. Schematic diagram of earth-fixed coordinate system and aircraft body-fixed coordinate system

图 4 常规航迹与优化航迹的飞行高度及飞行速度对比
Figure 4. Comparison of flight altitude and velocity between common and optimized flight path

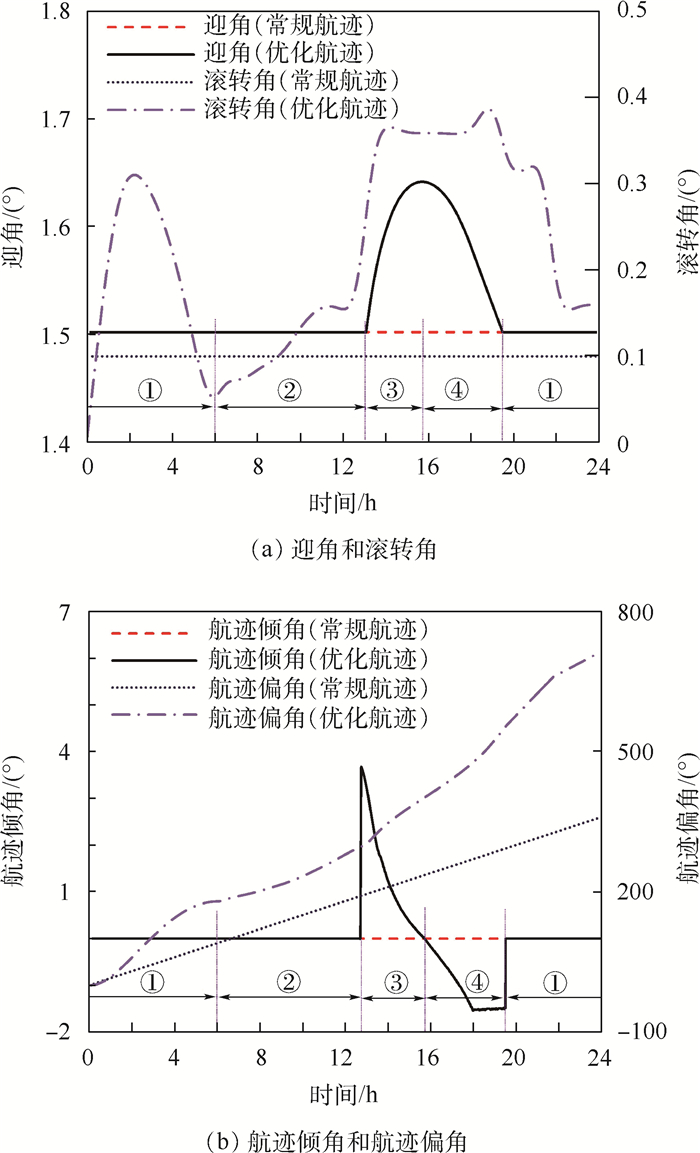
图 5 常规航迹与优化航迹的迎角、滚转角、航迹倾角和航迹偏角对比
Figure 5. Comparison of angle of attack, roll angle, flight path angle and heading angle between common and optimized flight path

图 6 常规航迹与优化航迹的储能电池电量状态对比
Figure 6. Comparison of battery pack state of charge between common and optimized flight path
表 1 系数Aij的值
Table 1. Value of coefficients Aij
i j=0 j=1 j=2 0 7.983×10-1 9.208×10-3 -9.792×10-5 1 5.898×100 1.392×10-2 2.255×10-3 2 -7.246×100 4.610×10-2 -1.894×10-2  下载: 导出CSV
下载: 导出CSV
表 2 系数Bij的值
Table 2. Value of coefficients Bij
i j=0 j=1 j=2 0 2.284×10-2 -6.603×10-4 1.493×10-5 1 1.403×10-1 2.108×10-4 -8.493×10-5 2 1.362×100 -6.438×10-2 2.983×10-3
下载: 导出CSV
表 3 系数Cij的值
Table 3. Value of coefficients Cij
i j=0 j=1 j=2 0 -2.481×100 2.783×100 -1.818×10-1 1 6.882×100 -4.081×100 -1.432×100 2 -3.640×100 8.042×10-1 2.200×100
下载: 导出CSV
表 4 高空太阳能无人机基本参数
Table 4. Basic parameters of high-altitude solar-powered UAV
参数 数值 m/kg 134 S/m2 25.5 Ssc/m2 20.4 Dp/m 1.5 c0.75R/m 0.10 QB/(kW·h) 21.5 VOC/V 120 RI/Ω 0.12
下载: 导出CSV
表 5 各部件能量转换效率
Table 5. Energy conversion efficiency of components
% 参数 数值 ηsc 21 ηMPPT 95 ηm 90
下载: 导出CSV
表 6 仿真结果对比
Table 6. Comparison of simulation results
参数 常规航迹 优化航迹 净吸收能量/(kW·h) 31.60 34.51 SOC最小值 0.261 0.272 SOCf 0.560 0.665 最小飞行高度/km 15.0 15.0 最大飞行高度/km 15.0 22.6
下载: 导出CSV
-
[1] ALVI O R.Development of solar powered aircraft for multipurpose application: AIAA-2010-3061[R].Reston: AIAA, 2010. [2] 阙建锋, 王维军, 吴宇.利于减少配平损失的太阳能飞机构型设计[J].北京航空航天大学学报, 2016, 42(7):1479-1485. http://bhxb.buaa.edu.cn/CN/abstract/abstract14006.shtmlQUE J F, WANG W J, WU Y.Design of solar-powered aircraft configuration for reducing trim loss[J].Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(7):1479-1485(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract14006.shtml [3] FAZELPOUR F, VAFAEIPOUR M, RAHBARI O, et al.Considerable parameters of using PV cells for solar-powered aircrafts[J].Renewable and Sustainable Energy Reviews, 2013, 22(8):81-91. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=3fd8a0664b490f7e25091133ae045ba1 [4] 张健, 张德虎.高空长航时太阳能无人机总体设计要点分析[J].航空学报, 2016, 37(S1):S1-S7. http://d.old.wanfangdata.com.cn/Periodical/hkxb2016z1001ZHANG J, ZHANG D H.Essentials of configuration design of HALE solar-powered UAVs[J].Acta Aeronautica et Astronautica Sinica, 2016, 37(S1):S1-S7(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/hkxb2016z1001 [5] 马东立, 包文卓, 乔宇航.基于重力储能的太阳能飞机飞行轨迹研究[J].航空学报, 2014, 35(2):408-416. http://d.old.wanfangdata.com.cn/Periodical/hkxb201402011MA D L, BAO W Z, QIAO Y H.Study of flight path for solar-powered aircraft based on gravity energy reservation[J].Acta Aeronautica et Astronautica Sinica, 2014, 35(2):408-416(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/hkxb201402011 [6] KLESH A T, KABAMBA P T.Energy-optimal path planning for solar-powered aircraft in level flight: AIAA-2007-6655[R].Reston: AIAA, 2007. https://www.researchgate.net/publication/228908912_Energy-Optimal_Path_Planning_for_Solar-Powered_Aircraft_in_Level_Flight [7] KLESH A T, KABAMBA P T.Solar-powered aircraft:Energy-optimal path planning and perpetual endurance[J].Journal of Guidance, Control, and Dynamics, 2009, 32(4):1320-1329. doi: 10.2514/1.40139 [8] SPANGELO S C, GILBERT E G.Periodic energy-optimal path planning for solar-powered aircraft: AIAA-2009-6061[R].Reston: AIAA, 2009. https://www.researchgate.net/publication/268557769_Periodic_Energy-Optimal_Path_Planning_for_Solar-Powered_Aircraft [9] SPANGELO S C, GILBERT E G.Power optimization of solar-powered aircraft with specified closed ground tracks[J].Journal of Aircraft, 2013, 50(1):232-238. doi: 10.2514/1.C031757 [10] MA D M, SHIAU J K, SU Y J, et al.Optimal level turn of solar-powered unmanned aerial vehicle flying in atmosphere[J].Journal of Guidance, Control, and Dynamics, 2010, 33(5):1347-1356. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=ac638c4ea59cdff23c7b78a0b34dc6fb [11] DAI R.Path planning of solar-powered unmanned aerial vehicles at low altitude[C]//IEEE 56th International Midwest Symposium on Circuits and Systems (MWSCAS).Piscataway, NJ: IEEE Press, 2013: 693-696. [12] VASISHT S, MESBAHI M.Trajectory design and coverage control for solar-powered UAVs: AIAA-2015-1314[R].Reston: AIAA, 2015. https://www.researchgate.net/publication/306260206_Trajectory_Design_and_Coverage_Control_for_Solar-Powered_UAVs [13] WU J F, WANG H L, LI N, et al.Distributed trajectory optimization for multiple solar-powered UAVs target tracking in urban environment by adaptive grasshopper optimization algorithm[J].Aerospace Science and Technology, 2017, 70:497-510. doi: 10.1016/j.ast.2017.08.037 [14] WU J F, WANG H L, LI N, et al.Path planning for solar-powered UAV in urban environment[J].Neurocomputing, 2017, 275:2055-2065. https://www.researchgate.net/publication/321008529_Path_planning_for_solar-powered_UAV_in_urban_environment [15] GAO X Z, HOU Z X, GUO Z, et al.Research on characteristics of gravitational gliding for high-altitude solar-powered unmanned aerial vehicles[J].Proceedings of the Institution of Mechanical Engineers Part G-Journal of Aerospace Engineering, 2012, 227(12):1911-1923. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=bb34aba8ab6dae5512b11b694430a73b [16] GAO X Z, HOU Z X, GUO Z, et al.The equivalence of gravitational potential and rechargeable battery for high-altitude long-endurance solar-powered aircraft on energy storage[J].Energy Conversion and Management, 2013, 76:986-995. doi: 10.1016/j.enconman.2013.08.023 [17] GAO X Z, HOU Z X, GUO Z, et al.Energy management strategy for solar-powered high-altitude long-endurance aircraft[J].Energy Conversion and Management, 2013, 70:20-30. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=42931054c3d381623169c33a13e86b94 [18] XU B, GENG X Y, LI Q D, et al.Energy-optimal path planning based on lithium battery status for solar-powered aircraft[C]//IEEE Chinese Guidance, Navigation and Control Conference(CGNCC).Piscataway, NJ: IEEE Press, 2017: 624-627. [19] RAJENDRAN P, SMITH H.Review of solar and battery power system development for solar-powered electric unmanned aerial vehicles[J].Advanced Materials Research, 2015, 1125:641-647. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=10.4028/www.scientific.net/AMR.1125.641 [20] MOURA S J, CALLAWAY D S, FATHY H K, et al.Tradeoffs between battery energy capacity and stochastic optimal power management in plug-in hybrid electric vehicles[J]. Journal of Power Sources, 2010, 195(9):2979-2988. doi: 10.1016/j.jpowsour.2009.11.026 -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 747
- HTML全文浏览量: 137
- PDF下载量: 376
- 被引次数: 0
