



-
摘要:
在无人机的伞降回收过程中,无人机与降落伞一直都处于实时的动平衡状态,两者在伞降回收过程中的耦合关系及其复杂,因此很难建立精准的无人机伞降回收动力学模型。针对该问题,将伞降回收系统划分为降落伞和无人机分别进行处理。针对时变对象降落伞,通过阻力面积随充气时间的变化关系建立其动力学模型。针对无人机,首先,基于多体动力学思路,将其划分为左右机翼和机身的多体系统,通过平板绕流系数优化其伞降过程中的大迎角动力学模型;然后,通过偏速度矩阵将各体的动力学模型引入伞降回收系统质心;最终,基于凯恩方程推导并建立了伞降回收系统六自由度模型,并引入海拔高度和风力对无人机伞降回收的影响。通过数值仿真与实验数据的对比,可以发现两者具有较好的一致性,该动力学模型能够为无人机的伞降回收提供指导。
Abstract:In the UAV parachute recovery process, the UAV and parachute are always in real-time dynamic balance state, and the coupling relationship between the two in the parachute recovery process is very complicated, so it is difficult to establish accurate dynamics model of UAV parachute recovery. For solving this problem, the UAV parachute recovery system was divided into the parachute and UAV, and the dynamics model of the parachute was established by the relationship between the drag area and the inflating time. First, based on the method of multibody dynamics, the UAV was divided into a multibody system, including the left wing, right wing and fuselage, and its high angle of attack dynamics model was optimized by the coefficient of flow around a flat plate. Second, the models of each body were introduced into the center of mass of the entire parachute recovery system by the partial velocity matrices. Finally, based on Kane equation, a six-degree-of-freedom model of the parachute recovery system was derived and established and the effects of the altitude and wind on the parachute recovery system dynamics were considered. Through the comparison of numerical simulation and experimental data, it is found that the two have good consistency, and this dynamics model can provide guidance for the UAV parachute recovery.
-
Key words:
- parachute recovery /
- flying-wing UAV /
- Kane equation /
- multibody system /
- dynamics modeling
-

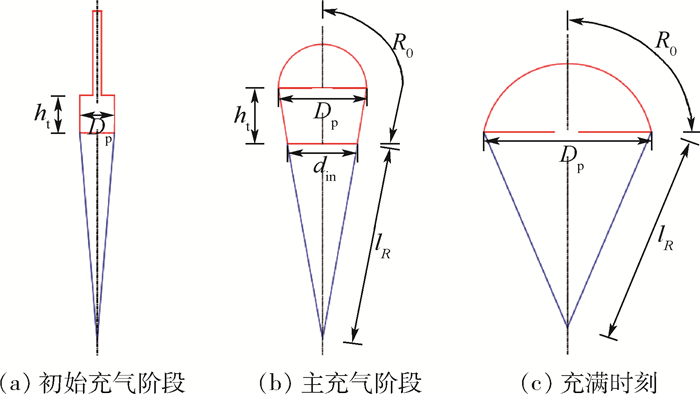
图 2 降落伞充气过程容积变化示意图
Figure 2. Schematic diagram of parachute volume variation during inflation process

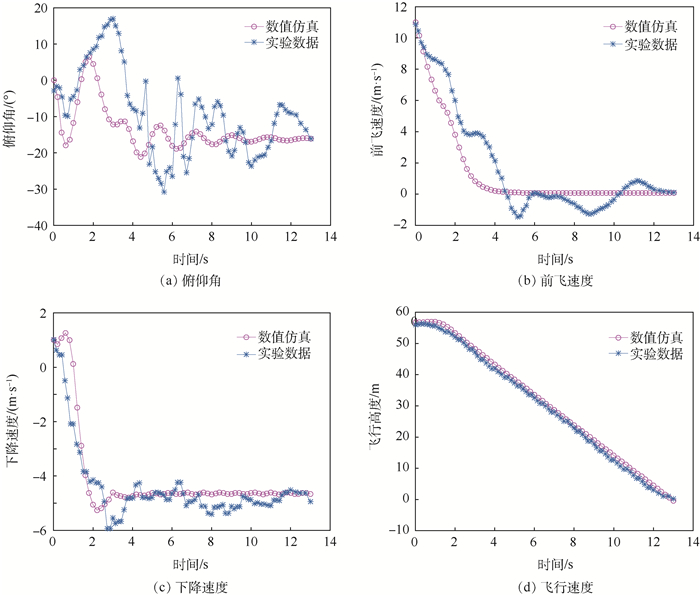
图 4 无人机俯仰角、前飞速度、下降速度和飞行高度仿真结果与实验结果对比
Figure 4. Comparison of UAV angle of pitch, forward velocity, descent velocity and flight height between simulation and experimental results

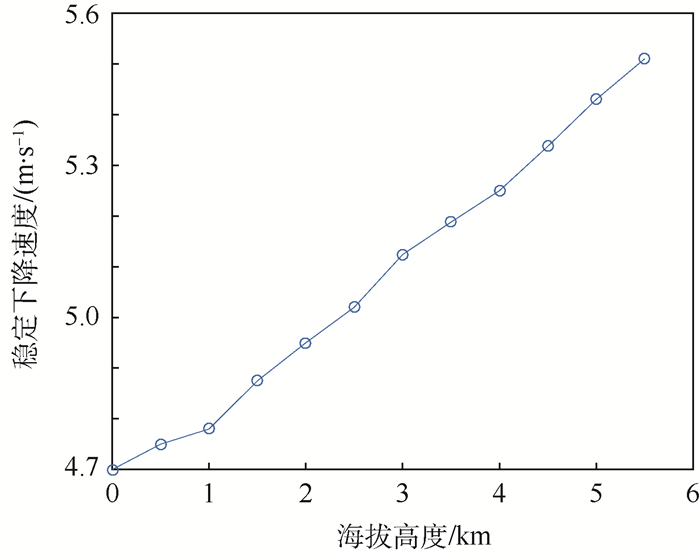
图 5 无人机稳定下降速度随海拔高度的变化
Figure 5. Variation of UAV steady descent velocity with altitude

图 6 受1 m/s顺风、逆风、正侧风和逆侧风时,无人机前飞速度、侧向速度、下降速度和俯仰角的变化
Figure 6. Variation of UAV forward velocity, side velocity, descent velocity and angle of pitch under 1 m/s down wind, against wind, positive side wind and reverse side wind
表 1 受1 m/s顺风、逆风、正侧风和逆侧风时,无人机伞降回收相关结果
Table 1. Related results of UAV parachute recovery under 1 m/s down wind, against wind, positive side wind and reverse side wind
风力状况 无人机稳定下降速度/(m·s-1) 沿X轴最大位移/m 沿Y轴最大位移/m 由开伞到着陆总时间/s 无风 5.05 17.10 0 22.82 顺风:1 m/s 5.16 34.04 0 21.44 逆风:1 m/s 5.22 0.36 0 21.24 正侧风:1 m/s 4.23 15.20 40.56 25.28 逆侧风:1 m/s 4.23 15.20 -40.56 25.28  下载: 导出CSV
下载: 导出CSV
-
[1] WU M J, XIAO T H, ANG H S, et al.Optimal flight planning for a z-shaped morphing-wing solar-powered unmanned aerial vehicle[J].Journal of Guidance, Control, and Dynamics, 2018, 41(2):497-504. doi: 10.2514/1.G003000 [2] 张健, 张德虎.高空长航时太阳能无人机总体设计要点分析[J].航空学报, 2016, 37(S1):S1-S7. http://d.old.wanfangdata.com.cn/Periodical/hkxb2016z1001ZHANG J, ZHANG D H.Essential of configuration design of HALE solar-powered UAVs[J].Acta Aeronautica et Astronautica Sinca, 2016, 37(S1):S1-S7(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/hkxb2016z1001 [3] GARRARD W L.Application of inflation theories to preliminary parachute force and stress analyses: AIAA-91-0862[R].Reston: AIAA, 1991. [4] YAVUZ T.The Equation of motion for a parachute system descending through a real fluid[J].Aeronautical Journal, 1985, 89(889):334-348. http://cn.bing.com/academic/profile?id=d7c811538002e1bbc7b19d11c87be1ee&encoded=0&v=paper_preview&mkt=zh-cn [5] IBRAHIM S K, ENGDAHL R A.Parachute dynamics and stability analysis: NASA-CR-120326[R].Washington, D.C.: NASA, 1974. [6] FALLON II E J.Parachute dynamics and stability analysis of the queen match recovery system: AIAA-91-0879-CP[R].Restor: AIAA, 1991. [7] WOLF D.Dynamic stability of a nonrigid parachute and payload system[J].Journal of Aircraft, 1971, 8(8):604-609. http://cn.bing.com/academic/profile?id=ae5e00566c735ce6f0597f9ad80cf1ed&encoded=0&v=paper_preview&mkt=zh-cn [8] 程文科, 杨小伟, 秦子增.物伞系统动力学特性研究[J].国防科技大学学报, 1998, 20(4), 27-30. http://cdmd.cnki.com.cn/Article/CDMD-10287-1012041504.htmCHENG W K, YANG X W, QIN Z Z.Analysis of the dynamic performance of a parachute and payload system[J].Journal of National University of Defense Technology, 1998, 20(4), 27-30(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10287-1012041504.htm [9] TOWNSEND M A.Kane's equations, Lagrange's equations, and virtual work[J].Journal of Guidance, Control, and Dynamics, 1992, 15(1):277-280. doi: 10.2514/3.20832 [10] KANE T R, LIKENS P W, LEVINSON D A.Spacecraft dynamics[M].New York:McGraw-Hill Book Company, 1983. [11] ZHAO Z J, REN G X.Multibody dynamic approach of flight dynamics and nonlinear aeroelasticity of flexible aircraft[J].AIAA Journal, 2011, 49(1):41-53. doi: 10.2514/1.45334 [12] HOGAN F R, FORBES J R.Modeling of spherical robots rolling on generic surfaces[J].Multibody System Dynamics, 2015, 35(1):91-109. http://cn.bing.com/academic/profile?id=4440f0f89032a9569a9536728f251873&encoded=0&v=paper_preview&mkt=zh-cn [13] CHANG L B, HU B Q, CHANG G B.Modified unscented quaternion estimator based on quaternion averaging[J].Journal of Guidance, Control, and Dynamics, 2014, 37(1):305-308. doi: 10.2514/1.61723 [14] 郭鹏.大型降落伞开伞过程研究[D].长沙: 国防科技大学, 2012: 72-80. http://cdmd.cnki.com.cn/Article/CDMD-90002-1014047996.htmGUO P.Research on the opening process of large parachute system[D].Changshan: National University of Defense Technology, 2012: 72-80(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-90002-1014047996.htm [15] 夏丹, 程维山, 刘考军, 等.基于Kane方法的仿鱼机器人波状游动的动力学建模[J].机械工程学报, 2009, 45(6):41-49. http://d.old.wanfangdata.com.cn/Periodical/jxgcxb200906005XIA D, CHEN W S, LIU K J, et al.Dynamic modeling of a fishlike robot with undulatory motion based on Kane's method[J].Journal of Mechanical Engineering, 2009, 45(6):41-49(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jxgcxb200906005 [16] 荣伟, 包进进.火星大气对降落伞充气性能影响的初步探讨[J].航天返回与遥感, 2017, 38(4):1-4. doi: 10.3969/j.issn.1009-8518.2017.04.001RONG W, BAO J J.The primary studies on the effect of martian atmosphere on parachute inflation performances[J].Spacecraft Recovery & Remote Sensing, 2017, 38(4):1-4(in Chinese). doi: 10.3969/j.issn.1009-8518.2017.04.001 [17] 姜海波, 曹树良, 程忠庆.平板大攻角扰流升力和阻力系数的计算[J].应用力学学报, 2011(5):518-520. http://www.cnki.com.cn/Article/CJFDTotal-YYLX201105015.htmJIANG H B, CAO S L, CHENG Z Q.Lift and drag coefficients of flow around a flat plate at high attack angles[J].Chinese Journal of Applied Mechanics, 2011(5):518-520(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-YYLX201105015.htm [18] 陈迎春, 张攀峰, 王晋军.绕流片分离流动特性的数值研究[J].北京航空航天大学学报, 2004, 30(12):1221-1224. doi: 10.3969/j.issn.1001-5965.2004.12.020CHEN Y C, ZHANG P F, WANG J J.Numerical simulation of separation flow around fiaps with varied gap size[J].Journal of Beijing University of Aeronautics and Astronautics, 2004, 30(12):1221-1224(in Chinese). doi: 10.3969/j.issn.1001-5965.2004.12.020 [19] TARN T J, SHOULTS G A, YAHG S P.A dynamic model of underwater vehicle with a robotics manipulator using Kane's method[J].Autonomous Robotics, 1996, 3(2-3):269-283 doi: 10.1007/BF00141159 -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 657
- HTML全文浏览量: 49
- PDF下载量: 497
- 被引次数: 0
