



Attitude quaternion continuous self-calibration model of hybrid inertial navigation system
-
摘要:
混合式惯导系统作为一种新型惯导系统,具有三轴全姿态物理平台、捷联姿态算法和系统装机自标定等特点。针对以上特点,为提高其导航定位精度,在混合式惯导系统框架角约束方程的基础上,利用姿态四元数代替欧拉角描述混合式惯导系统中三轴物理平台的转动,建立了一种混合式惯导系统姿态四元数连续自标定模型对其进行误差系数标定。针对该模型的特点,对传统的无迹卡尔曼滤波(UKF)算法进行改进,提出了一种基于奇异值分解的四元数无迹卡尔曼滤波(SVD-QUKF)算法进行模型误差系数辨识。仿真和试验结果表明,基于SVD-QUKF算法,四元数连续自标定模型能够以低于1%的相对误差标定出混合式惯导系统所有的误差系数,在标定精度和计算速度上相比基于传统UKF算法的框架角自标定模型都具有一定优势。
-
关键词:
- 混合式惯导系统 /
- 连续自标定 /
- 姿态四元数 /
- 无迹卡尔曼滤波(UKF) /
- 奇异值分解(SVD)
Abstract:As a kind of new inertial navigation system, the hybrid inertial navigation system has the characteristics of three-axis physical platform, strapdown attitude algorithm and installed self-calibration. Based on these characteristics and in order to improve the accuracy of hybrid inertial navigation system the attitude quaternion is used to replace the traditional Euler angle to represent the rotation of three-axis physical platform in the continuous self-calibration, and the attitude quaternion continuous self-calibration model of hybrid inertial navigation system based on the gimbal angle equation is established for its error coefficient estimation.Then a quaternion unscented Kalman filter based on singular value decomposition (SVD-QUKF) is proposed by improving the traditional unscented Kalman filter (UKF) based on the characteristics of the attitude quaternion model. The simulation and experimental results prove that the proposed attitude quaternion continuous self-calibration model based on the SVD-QUKF can calibrate all the error coefficients of hybrid inertial navigation system with the relative error less than 1%, and the calibration precision and the computing speed are better than the traditional gimbal angle model based on UKF.
-

图 2 四元数模型和框架角模型的框架角估计误差曲线
Figure 2. Estimate error curves of gimbal angle in quaternion model and gimbal angle model

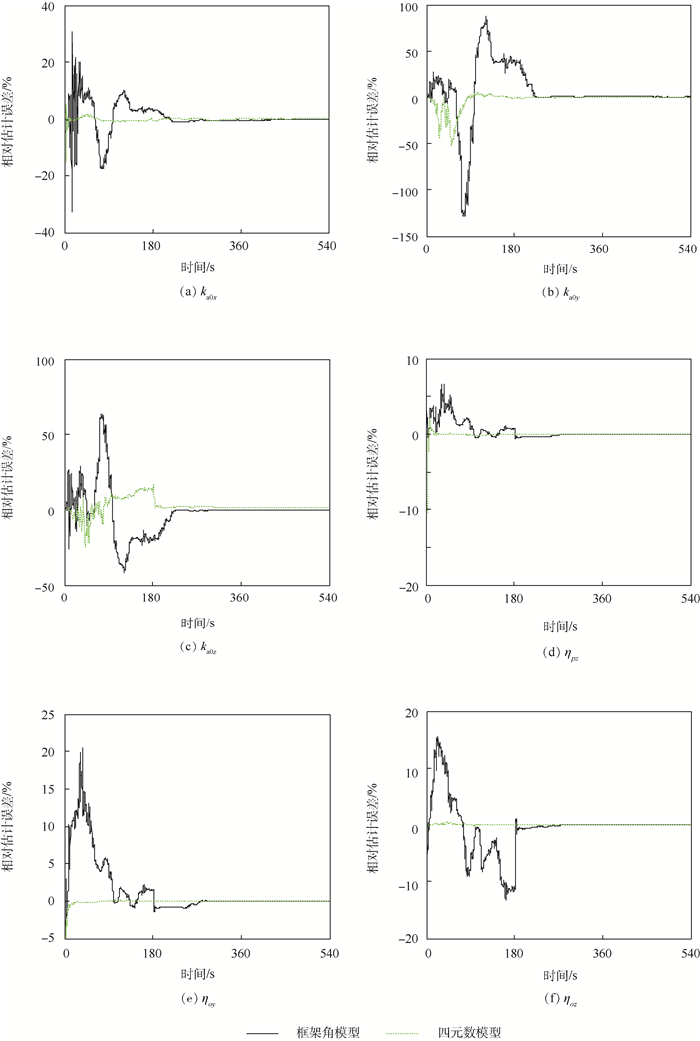
图 3 ka0i(i=x, y, z)和ηji(j=p, o; i=y, z)的相对估计误差曲线
Figure 3. Relative estimate error curves of ka0i(i=x, y, z) and ηji(j=p, o; i=y, z)

图 4 试验中四元数模型和框架角模型的框架角估计误差曲线
Figure 4. Gimbal angle estimate errors of quaternion model and gimbal angle model in experiment
表 1 误差系数相对估计误差和算法计算时间
Table 1. Computing time and relative estimate errors of error coefficients
误差系数 相对估计误差/% 四元数模型 框架角模型 kg0x -0.71 1.71 kg0y 0.69 2.74 kg0z -0.62 -4.69 Δsx -0.10 1.82 Δsy -0.35 -1.33 Δsz 0.19 -1.26 Δox -0.24 1.47 Δoy -0.36 1.26 Δoz 0.57 -1.91 ka0x -0.22 1.39 ka0y -0.93 3.49 ka0z -0.25 4.03 ka1x 0.031 -1.47 ka1y -0.29 0.49 ka1z -0.11 0.64 ηpz 0.005 5 0.46 ηoy -0.001 7 0.20 ηoz 0.001 3 -0.023 计算时间/s 19 35  下载: 导出CSV
下载: 导出CSV
表 2 四元数模型和框架角模型的框架角均方根误差
Table 2. RMSE of gimbal angle of quaternion model and gimbal angle model
模型 RMSE q0 q1 q2 q3 四元数模型 0.059 0.047 0.083 0.062 框架角模型 0.220 0.083 0.087 0.131
下载: 导出CSV
-
[1] 冯培德.论混合式惯导系统[J].中国惯性技术学报, 2016, 24(3):281-284. http://d.old.wanfangdata.com.cn/Periodical/zggxjsxb201701001FENG P D.On hybrid inertial navigation systems[J].Journal of Chinese Inertial Technology, 2016, 24(3):281-284(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/zggxjsxb201701001 [2] JACKSON D J.Continuous calibration and alignment techniques for an all-attitude inertial platform: AIAA-73-865[R].Reston, VA: AIAA, 1973. [3] CAO Y, CAI H, ZHANG S F, et al.A new continuous self-calibration scheme for a gimbaled inertial measurement unit[J].Measurement Science and Technology, 2012, 23(1):385-394. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=2aa4d33dd73de8cf3f3e342f79dceb52 [4] 杨华波.惯性测量系统误差标定及分离技术研究[D].长沙: 国防科学技术大学, 2008. http://xuewen.cnki.net/CDFD-2008098743.nh.htmlYANG H B.Research on error calibration and separation for inertial measurement systems[D].Changsha: National University of Defense Technology, 2008(in Chinese). http://xuewen.cnki.net/CDFD-2008098743.nh.html [5] 曹渊, 张士峰, 杨华波, 等.惯导平台误差快速自标定方法研究[J].宇航学报, 2011, 32(6):1281-1287. doi: 10.3873/j.issn.1000-1328.2011.06.012CAO Y, ZHANG S F, YANG H B, et al.Research on rapid self-calibration method for inertial platform[J].Journal of Astronautics, 2011, 32(6):1281-1287(in Chinese). doi: 10.3873/j.issn.1000-1328.2011.06.012 [6] 丁智坚, 蔡洪, 杨华波, 等.浮球式惯性平台连续翻滚自标定自对准方法[J].国防科技大学学报, 2015, 37(3):148-154. http://d.old.wanfangdata.com.cn/Periodical/gfkjdxxb201503024DING Z J, CAI H, YANG H B, et al.Continuous self-calibration and self-alignment method for floated inertial platform[J].Journal of National University of Defense Technology, 2015, 37(3):148-154(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/gfkjdxxb201503024 [7] 许永飞, 张士峰.惯导平台自标定中安装误差可观性分析[J].中国惯性技术学报, 2015, 23(5):575-579. http://d.old.wanfangdata.com.cn/Periodical/zggxjsxb201505004XU Y F, ZHANG S F.Observability analysis of IMU's misalignment angles in self-calibration for inertial platform[J].Journal of Chinese Inertial Technology, 2015, 23(5):575-579(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/zggxjsxb201505004 [8] 连丁磊, 夏刚, 王汀, 等.基于陀螺仪敏感轴系的平台连续翻滚自标定算法[J].导弹与航天运载技术, 2013(2):24-29.LIAN D L, XIA G, WANG T, et al.Self-calibration algorithm of inertial navigation platform continuous tumble based on gyro sensitive shaft system[J].Missiles and Space Vehicles, 2013(2):24-29(in Chinese). [9] CHOUKROUN D, BAR-ITZHACK I Y, OSHMAN Y.Novel quaternion Kalman filter[J].IEEE Transactions on Aerospace and Electronic Systems, 2006, 42(1):174-190. doi: 10.1109/TAES.2006.1603413 [10] XUE L, YUAN W Z, CHANG H L, et al.Application of quaternion-based extended Kalman filter for MAV attitude estimation using MEMS sensors[J].Nanotechnology and Precision Engineering, 2009, 7(2):163-167. [11] XU X S, ZHOU F, ZHANG T, et al.Initial alignment algorithm for SINS based on quaternion adaptive Kalman filter[J].Journal of Chinese Inertial Technology, 2016, 24(4):454-459. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zggxjsxb201604007 [12] XU C X, WU G, SHI C, et al.Temperature compensation model research on fiber optic gyroscope[J].Optical Technique, 2014, 40(6):492-498. doi: 10.3788/GXJS [13] 王琪, 汪立新, 秦伟伟, 等.基于双回路扩展卡尔曼滤波的惯性平台连续自标定[J].宇航学报, 2017, 38(6):621-629. http://d.old.wanfangdata.com.cn/Periodical/yhxb201706009WANG Q, WANG L X, QIN W W, et al.Continuous self-calibration of inertial platform based on dual extend Kalman filter[J].Journal of Astronautics, 2017, 38(6):621-629(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/yhxb201706009 [14] 谭兴龙, 王坚, 李增科.基于SVD的改进抗差UKF算法及在组合导航中的应用[J].控制与决策, 2014, 29(10):1744-1750. http://d.old.wanfangdata.com.cn/Periodical/kzyjc201410003TAN X L, WANG J, LI Z K.SVD aided improved robust UKF algorithm and its application for integration navigation[J].Control and Decision, 2014, 29(10):1744-1750(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/kzyjc201410003 [15] LIU Y, YU A X, ZHU J B, et al.Unscented Kalman filtering in the additive noise case[J].Science China:Technology Sciences, 2010, 53(4):929-941. doi: 10.1007/s11431-010-0119-z [16] AINSCOUGH T, ZANETTI R, CHRISTIAN J, et al.Q-method extend Kalman filter[J].Journal of Guidance, Control, and Dynamics, 2015, 38(4):752-760. doi: 10.2514/1.G000118 [17] 杨华波, 蔡洪, 张士峰, 等.高精度惯性平台连续自标定自对准技术[J].宇航学报, 2006, 27(4):600-604. doi: 10.3321/j.issn:1000-1328.2006.04.006YANG H B, CAI H, ZHANG S F, et al.Continuous calibration and alignment techniques for a high precision inertial platform[J].Journal of Astronautics, 2006, 27(4):600-604(in Chinese). doi: 10.3321/j.issn:1000-1328.2006.04.006 -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 756
- HTML全文浏览量: 82
- PDF下载量: 315
- 被引次数: 0
