



-
摘要:
针对单发、全发失效(OEI/AEI)后提升倾转旋翼机安全性的需求,基于最小化回避区思想分析预测倾转旋翼机的高度-速度低速回避区。首先,引入混合操纵模型,建立倾转旋翼机发动机失效后增广的二维纵向刚体飞行动力学模型,基于最优控制理论将倾转旋翼机低速回避区边界转化为安全着陆问题;然后,构建倾转旋翼机发动机失效后安全着陆飞行的连续非线性最优控制模型,采用间断有限元法(DPG)和非线性规划算法进行求解;最后,以XV-15为研究对象,验证了算法的准确性,并研究了不同飞行重量、操纵要求下,倾转旋翼机的单发、全发失效的高度-速度低速回避区,分析了倾转短舱对低速回避区的影响,给出了XV-15单发失效的垂直起飞最大安全重量。
-
关键词:
- 倾转旋翼机 /
- 最优控制理论 /
- 单/全发失效(OEI/AEI) /
- 低速回避区 /
- 间断有限元法(DPG)
Abstract:This paper focuses on the analysis and prediction of the height-velocity low-speed avoidance zone of tiltrotor based on the idea of minimizing avoidance zone, aiming at improve the safety of tiltrotor aircraft in one/all engine inoperative (OEI/AEI). First, mixed control model is introduced to establish an augmented longitudinal two-dimensional rigid-body flight dynamic model after engine failure of tiltrotor. Second, Based on the optimal control theory, the boundary of avoidance zone is transformed into a safe landing problem, then a continuous nonlinear optimal control model of tiltrotor for landing safely after engine failure is established, solved it by discontinuous finite element method (DPG) and nonlinear programming algorithm. Finally, Using XV-15 as the sample vehicle, the accuracy of the algorithm is verified. And the height-speed avoidance zone under different flight weight or control restraint after one/all engine inoperative was studied, the influence of nacelle on the low-speed avoidance zone is analyzed, the maximum safe gross weight suggested for XV-15 during vertical operation is given after one engine failure.
-

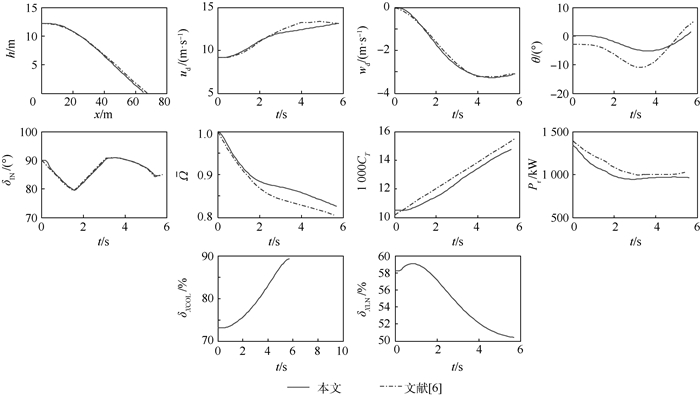
图 3 不同模型的单发失效状态最优化轨迹
Figure 3. Optimal trajectory of different models in one engine inoperative (OEI) condition

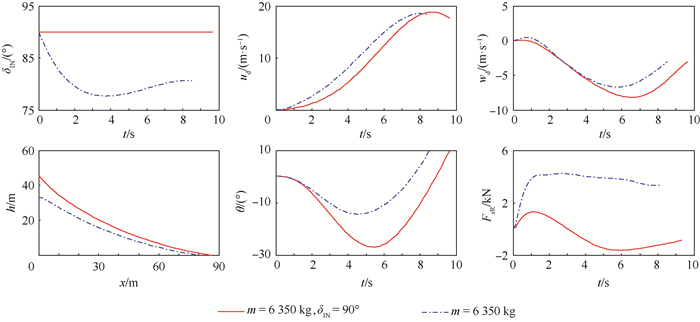
图 5 单发失效时高悬停点飞行轨迹及操纵时间历程(m=6 350 kg)
Figure 5. Flight trajectory and history of control of high hover point in OEI condition (m=6 350 kg)
-
[1] Federal Aviation Administration.Airworthiness standards: Transport category rotorcraft: CFR-PART 29[S].Washington, D.C.: Federal Aviation Administration, 2019. [2] SHARMA V.Optimal sideways operation of a category-A helicopter from an elevated helipad[C]//American Helicopter Society 52nd Annual Forum, 1996: 852-866. [3] JHEMI A A.Optimal flight of a helicopter in engine failure[D].Minneapolis: University of Minnesota, 1999. https://www.researchgate.net/publication/33750359_Optimal_flight_of_a_helicopter_in_engine_failure [4] BOTTASSO C L, CROCE A, LEONELLO D, et al.Optimization of critical trajectories for rotorcraft vehicles[J].Journal of the American Helicopter Society, 2005, 50(2):165-177. doi: 10.4050/1.3092853 [5] 孟万里.直升机单台发动机失效后飞行轨迹优化研究与应用[D].南京: 南京航空航天大学, 2014. http://cdmd.cnki.com.cn/Article/CDMD-10287-1015951833.htmMENG W L.Study and application of trajectory optimization for helicopter flight after one engine failure[D].Nanjing: Nanjing University of Aeronautics and Astronautics, 2014(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10287-1015951833.htm [6] CARLSON E B.Optimal tiltrotor aircraft operations during power failure[D].Minneapolis: University of Minnesota, 1999. https://www.researchgate.net/publication/33687892_Optimal_tiltrotor_aircraft_operations_during_power_failure [7] CARLSON E B, ZHAO Y Y.Optimal short takeoff of tiltrotor aircraft in one engine failure[J].Journal of Aircraft, 2002, 39(2):280-289. doi: 10.2514/2.2925 [8] CARLSON E B, ZHAO Y Y.Prediction of tiltrotor height-velocity diagrams using optimal control theory[J].Journal of Aircraft, 2003, 40(5):896-905. doi: 10.2514/2.6865 [9] 严旭飞, 陈仁良.倾转旋翼机动态倾转过渡过程的操纵策略优化[J].航空学报, 2017, 38(7):520865. http://d.old.wanfangdata.com.cn/Periodical/hkxb201707005YAN X F, CHEN R L.Control strategy optimization of dynamic conversion procedure of tilt-rotor aircraft[J].Acta Aeronautica et Astronautica Sinica, 2017, 38(7):520865(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/hkxb201707005 [10] 严旭飞, 陈仁良.倾转旋翼机短距起飞单发失效着陆的轨迹优化[J].哈尔滨工业大学学报, 2017, 49(10):38-44. doi: 10.11918/j.issn.0367-6234.201604113YAN X F, CHEN R L.Trajectory optimization of tilt-rotor aircraft landing in short takeoff after one engine failure[J].Journal of Harbin Institute of Technology, 2017, 49(10):38-44(in Chinese). doi: 10.11918/j.issn.0367-6234.201604113 [11] TALBOT P D, TINLING B E.A mathematical model of a single main rotor helicopter for piloted simulation[R].Washington, D.C.: NASA, 1982. [12] FERGUSON S W.A mathematical model for real time flight simulation of a generic tilt rotor aircraft: NASA CR166536[R].Washington, D.C: NASA, 1988. [13] 曹芸芸.倾转旋翼飞行器飞行动力学数学建模方法研究[D].南京: 南京航空航天大学, 2012. http://cdmd.cnki.com.cn/Article/CDMD-10287-1014005312.htmCAO Y Y.Research on mathematical modeling method for tilt rotor aircraft flight dynamic[D].Nanjing: Nanjing University of Aeronautics and Astronautics, 2012(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10287-1014005312.htm [14] 严旭飞, 池骋, 陈仁良, 等.变转速旋翼直升机单发失效低速回避区分析[J].航空学报, 2018, 39(10):122107. http://d.old.wanfangdata.com.cn/Periodical/hkxb201810007YAN X F, CHI C, CHEN R L, et al.Analysis of low-speed height-velocity diagram of variable speed rotor helicopter in one engine inoperative situation[J].Acta Aeronautics et Astronautica Sinica, 2018, 39(10):122107(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/hkxb201810007 [15] BETTS J T.Practical methods for optimal control using nonlinear programming[M].Philadelphia:Society for Industrial and Applied Mathematics, 2001. [16] BOTTASSO C L, SCORELLETTI F.Trajectory optmization strategies for simulation of the ADS-33 mission task elements[C]//European Rotorcraft Forum, 2008: 1-21. [17] GILL P E, MURRAY W.User's guide for SNOPT Version 7: Software for large-scale nonlinear programming[Z/OL].San Diego: University of California, 2011: 4-29.https://web.stanford.edu/group/SOL/guides/sndoc7.pdf. -

 下载:
下载:




 点击查看大图
点击查看大图
计量
- 文章访问数: 702
- HTML全文浏览量: 35
- PDF下载量: 334
- 被引次数: 0
