



-
摘要:
针对应用于风洞试验模型支撑的绳系并联机器人的设计需求,采用实验和理论建模相结合的方法,研究绳阻尼对绳系并联机器人动力学特性的影响。首先,为了准确地定量描述绳阻尼,设计了一套测量绳阻尼的实验装置,通过实验得到了不同参数下的绳阻尼比;其次,考虑了绳阻尼,对绳张力进行建模,并提出了考虑绳阻尼的绳系并联机器人的动力学建模方法;最后,分析了绳阻尼对绳系并联机器人动力学特性的影响。结果表明:绳阻尼对绳系并联机器人动力学响应的影响主要体现在响应幅值上,绳直径越大,绳阻尼对绳系并联机器人动力学响应的减振作用越明显。当绳阻尼系数大于0.6 N·s/m时,不论绳直径粗细如何,绳阻尼对绳系并联机器人动力学特性的影响不能忽略。研究结果可为绳系并联机器人的设计提供理论指导。
Abstract:To actualize the design requirement of a wire-driven parallel robot applied as the model support in wind tunnel tests, the influence of wire damping on the dynamic characteristics of the wire-driven parallel robot was studied by combining experimental and theoretical modeling methods. Firstly, in order to describe the wire damping accurately and quantitatively, a set of experimental devices was designed to measure the wire damping ratio under different parameters. Secondly, considering the wire damping, the wire tension was modeled and the motion equation of the wire-driven parallel robot was established. Finally, the influence of wire damping on the dynamic characteristics of the wire-driven parallel robot was analyzed. The results show that wire damping mainly affects the amplitude response of the wire-driven parallel robot. The larger the diameter of the wire is, the more obvious the effect of wire damping on the vibration reduction of the wire-driven parallel robot is. When the wire damping coefficient is greater than 0.6 N·s/m, the influence of wire damping on the dynamic characteristics of the wire-driven parallel robot cannot be neglected, regardless of the diameter of the wire.The research results can provide theoretical guidance for the design of the wire-driven parallel robot.
-
Key words:
- wire-driven parallel robot /
- wire damping /
- dynamic characteristics /
- wind tunnel test /
- model support
-

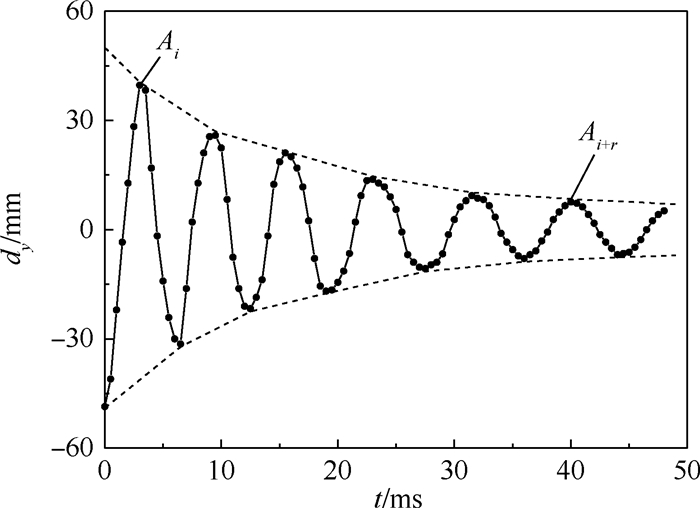
图 3 绳在竖直面内的振动位移响应(d=0.6 mm,L0=1 m,T0=30 N)
Figure 3. Vibration displacement response of wire in vertical plane(d=0.6 mm, L0=1 m, T0=30 N)

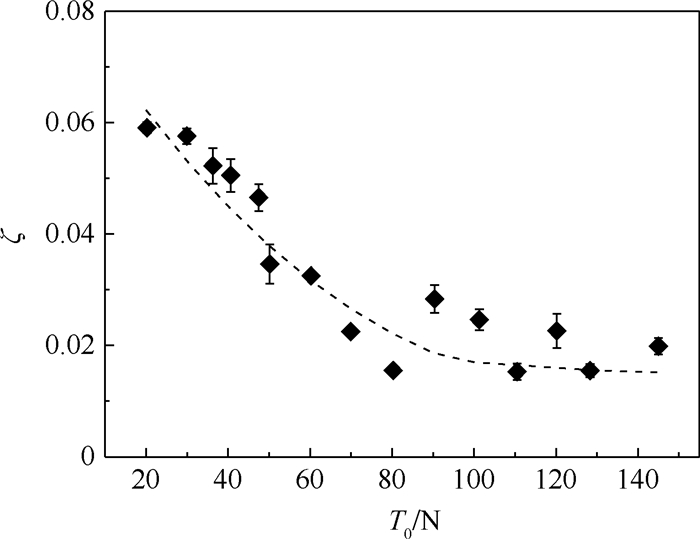
图 4 绳阻尼比与预紧力的关系(d=0.6 mm,L0=1 m)
Figure 4. Relationship between wire damping ratio and preload(d=0.6 mm, L0=1 m)

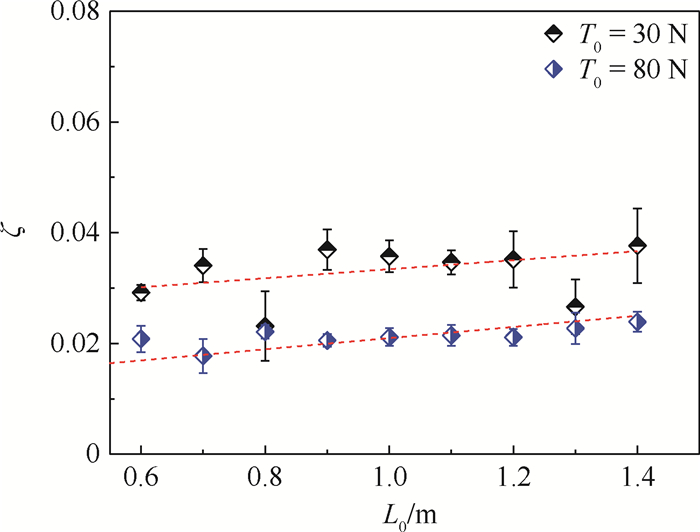
图 5 绳阻尼比与初始绳长的关系(d=0.6 mm)
Figure 5. Relationship between wire damping ratio and wire length (d=0.6 mm)

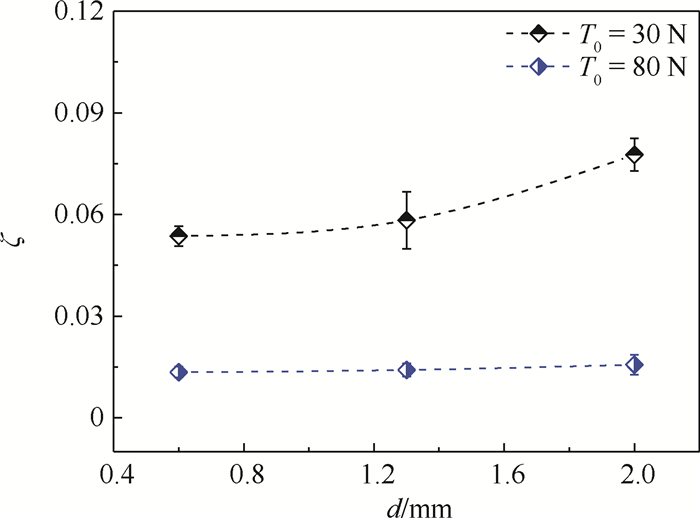
图 6 绳阻尼比与绳直径的关系(L0=1 m)
Figure 6. Relationship between wire damping ratio and wire diameter (L0=1 m)

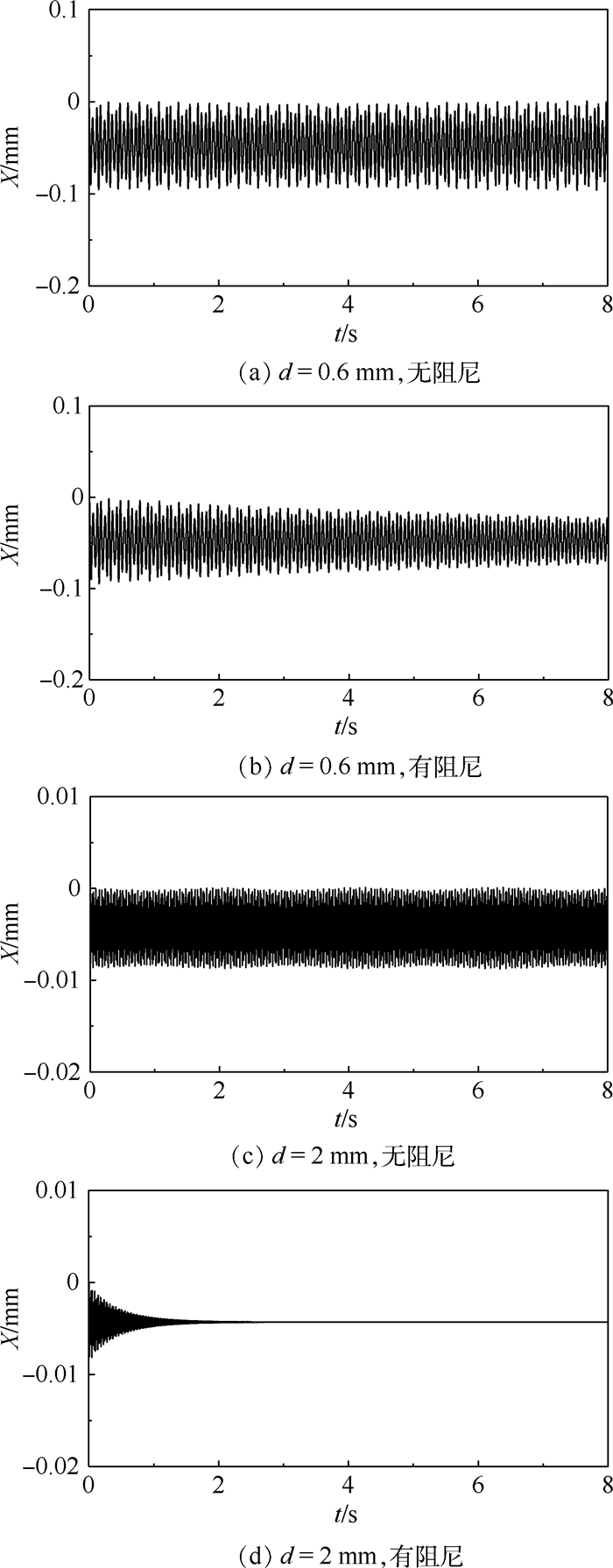
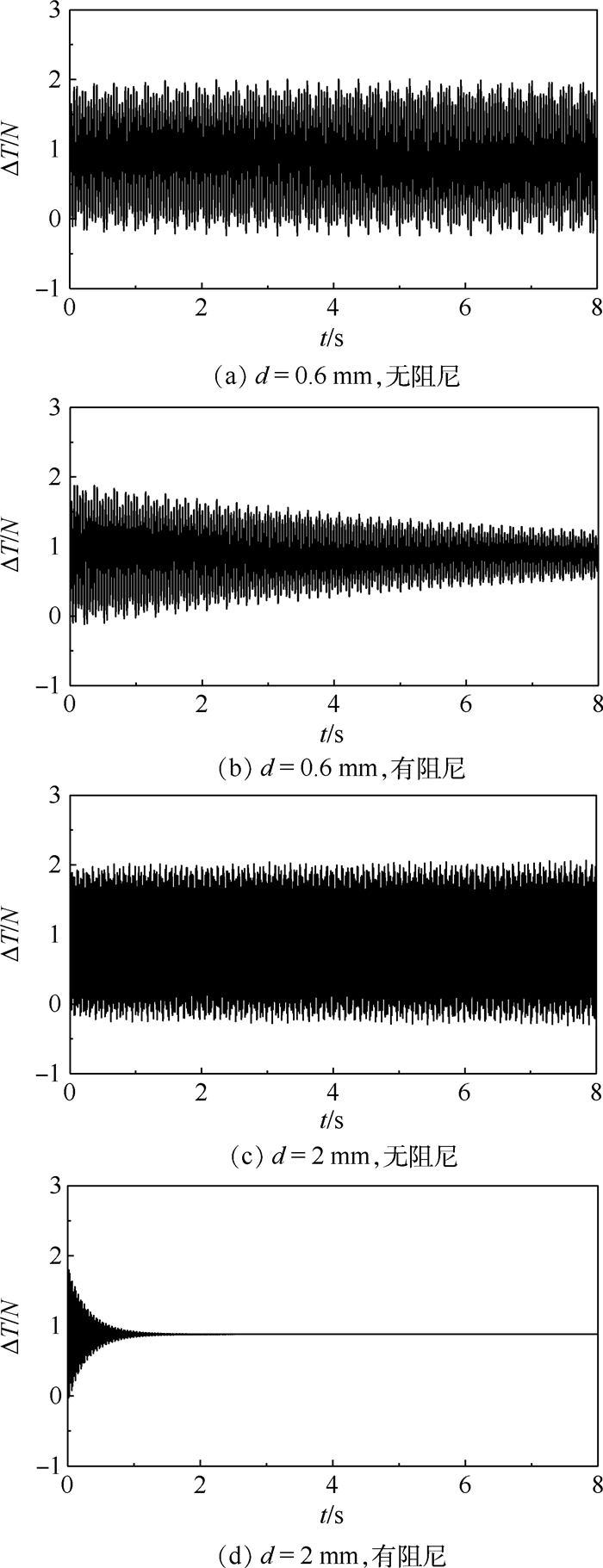
图 13 绳阻尼系数变化对WDPR动力学响应的影响
Figure 13. Influence of wire damping coefficient variation on dynamic response of WDPR
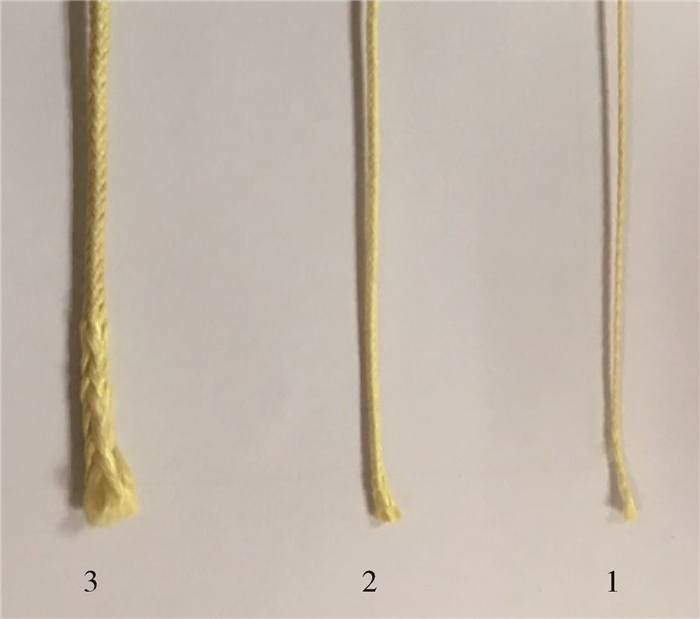
表 1 绳样本的物性参数
Table 1. Physical parameters of wire samples
样本序号 绳直径d/mm 材料 体密度ρw/(kg·m-3) 初始绳长L0/m 预紧力T0/N 1 0.6 Kevlar 1 440 0.6~1.4 20~150 2 1.3 3 2  下载: 导出CSV
下载: 导出CSV
表 2 不同直径绳的阻尼系数(绳5)
Table 2. Damping coefficient of wire with different diameters(Wire No.5)
绳直径d/mm 初始绳长L0/m 预紧力T0/N 阻尼比ζ 阻尼系数c/(N·s·m-1) 0.6 0.685 30 0.034 0.131 2 0.685 30 0.075 3.198
下载: 导出CSV
-
[1] LEPIDI M, GATTULLI V.A parametric multi-body section model for modal interactions of cable-supported bridges[J].Journal of Sound and Vibration, 2014, 333(19):4579-4596. doi: 10.1016/j.jsv.2014.04.053 [2] ARENA A, CASALOTTI A, LACARBONARA W, et al.Dynamics of container cranes:Three-dimensional modeling, full-scale experiments, and identification[J].International Journal of Mechanical Sciences, 2015, 93:8-21. doi: 10.1016/j.ijmecsci.2014.11.024 [3] 夏洁, 庞兆君, 金栋平.面内弹性绳系卫星系统的内共振[J].振动工程学报, 2012, 25(3):232-237. doi: 10.3969/j.issn.1004-4523.2012.03.002XIA J, PANG Z J, JIN D P.Inner resonance of an in-plane elastic tethered satellite system[J].Journal of Vibration Engineering, 2012, 25(3):232-237(in Chinese). doi: 10.3969/j.issn.1004-4523.2012.03.002 [4] 杜敬利, 崔传贞, 段清娟, 等.考虑柔索振动影响时索牵引并联机器人的动力学分析与控制[J].振动与冲击, 2012, 31(24):88-97. doi: 10.3969/j.issn.1000-3835.2012.24.018DU J L, CUI C Z, DUAN Q J, et al.Dynamic analysis and control of a cable-driven parallel manipulator considering cable vibration effects[J].Journal of Vibration and Shock, 2012, 31(24):88-97(in Chinese). doi: 10.3969/j.issn.1000-3835.2012.24.018 [5] LAFOURCADE P, LLIBRE M, REBOULET C.Design of a parallel wire-driven manipulator for wind tunnels[C]//Proceedings of the Workshop on Fundamental Issues and Future Research Directions for Parallel Mechanisms and Manipulators, 2002: 187-194. [6] ROGNANT M, COURTEILLE E.Improvement of cable tension observability through a new cable driving unit design[C]//3rd International Conference on Cable-Driven Parallel Robots.Berlin: Springer, 2018, 53: 208-291. doi: 10.1007/978-3-319-61431-1_24 [7] XIAO Y W, LIN Q, ZHENG Y Q, et al.Model aerodynamic tests with a wire-driven parallel suspension system in low-speed wind tunnel[J].Chinese Journal of Aeronautics, 2010, 23(4):393-400. doi: 10.1016/S1000-9361(09)60233-8 [8] FINEGAN I C, GIBSON R F.Analytical modeling of damping at micromechanical level in polymer composites reinforced with coated fibers[J].Composites Science and Technology, 2000, 60(7):1077-1084. doi: 10.1016/S0266-3538(00)00003-8 [9] GUAN Y J, WEI Y T.A new effective 3-D FE formulation of FRP structural modal damping for thick laminate[J].Composite Structures, 2009, 87(3):225-231. doi: 10.1016/j.compstruct.2008.01.009 [10] SINGH S P, GUPTA K.Damped free vibrations of layered composite cylindrical shells[J].Journal of Sound and Vibration, 1994, 172(2):191-209. http://cn.bing.com/academic/profile?id=2f8d254275db328b13a5e3b144de68fb&encoded=0&v=paper_preview&mkt=zh-cn [11] CRANE R M, GILLESPIE JR J W.Analytical model for prediction of the damping loss factor of composite materials[J].Polymer Composites, 1992, 13(3):179-190. doi: 10.1002/pc.750130306 [12] 马力, 杨金水.新型轻质复合材料夹芯结构振动阻尼性能研究进展[J].应用数学和力学, 2017, 38(4):369-398. http://d.old.wanfangdata.com.cn/Periodical/yysxhlx201704001MA L, YANG J S.Progresses in the study on vibration damping properties of novel lightweight composite sandwich structures[J].Applied Mathematics and Mechanics, 2017, 38(4):369-398(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/yysxhlx201704001 [13] GOODDING J C, ARDELEAN E V, BABUŠKA V, et al.Experimental techniques and structural parameter estimation studies of spacecraft cables[J].Journal of Spacecraft and Rockets, 2011, 48(6):942-957. doi: 10.2514/1.49346 [14] STENGEL D, THIELE K, CLOBES M, et al.Aerodynamic damping of nonlinear movement of conductor cables in wind tunnel tests, numerical simulations and full scale measurements[J].Journal of Wind Engineering & Industrial Aerodynamics, 2017, 169:47-53. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=ce387541aa59bd7e8281e99d4bf4d81f [15] 谢旭, 中村一史, 前田研一, 等.CFRP拉索阻尼特性实验研究和理论分析[J].工程力学, 2010, 27(3):205-211. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gclx201003032XIE X, NAKAMURA H, MAEDA K, et al.Theoretical analysis and experimental test on damping characteristics of CFRP stay cables[J].Engineering Mechanics, 2010, 27(3):205-211(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gclx201003032 [16] 李晓章, 谢旭, 张鹤.桥梁拉索用CFRP线材阻尼特性试验研究和理论分析[J].工程力学, 2015, 32(1):176-183. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gclx201501023LI X Z, XIE X, ZHANG H.Experimental and theoretical studies on the damping properties of CFRP wires used in bridge cables[J].Engineering Mechanics, 2015, 32(1):176-183(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gclx201501023 [17] YAMAGUCHI H, ADHIKARI R.Energy-based evaluation of modal damping in structural cables with and without damping treatment[J].Journal of Sound and Vibration, 1995, 181(1):71-83. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=bb9595d7ac9439f823616e2a1558621d [18] SPAK K S, AGNES G S, INMAN D J.Modeling vibration response and damping of cables and cabled structures[J].Journal of Sound and Vibration, 2015, 336:240-256. doi: 10.1016/j.jsv.2014.10.009 [19] WEI C Y, KUKUREKA S N.Evaluation of damping and elastic properties of composites and composite structures by the resonance technique[J].Journal of Materials Science, 2000, 35(15):3785-3792. doi: 10.1023/A:1004817011240 [20] 王晓光, 林麒.风洞试验绳牵引并联支撑技术研究进展[J].航空学报, 2018, 39(9):022064. http://d.old.wanfangdata.com.cn/Periodical/hkxb201810001WANG X G, LIN Q.Advances of wire-driven parallel suspension technologies in wind tunnel tests[J].Acta Aeronautica et Astronautica Sinica, 2018, 39(9):022064(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/hkxb201810001 [21] 汪选要, 曹毅.冗余并联柔索机构轨迹跟踪控制的研究[J].机械设计, 2012, 29(11):36-40. http://d.old.wanfangdata.com.cn/Periodical/jxsj201211009WANG X Y, CAO Y.Research on trajectory tracking control of wire-driven parallel manipulator[J].Journal of Machine Design, 2012, 29(11):36-40(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jxsj201211009 [22] 汪选要, 曹毅, 黄真.基于内张力补偿的并联柔索机构控制系统的研究[J].机械设计与制造, 2013(1):185-187. doi: 10.3969/j.issn.1001-3997.2013.01.062WANG X Y, CAO Y, HUANG Z.Based on internal tension compensation research on control system of the redundant wire-driven parallel manipulators[J].Machinery Design & Manufacture, 2013(1):185-187(in Chinese). doi: 10.3969/j.issn.1001-3997.2013.01.062 [23] 刘欣, 仇原鹰, 盛英.风洞试验绳牵引冗余并联机器人的刚度增强与运动控制[J].航空学报, 2009, 30(6):1156-1164. doi: 10.3321/j.issn:1000-6893.2009.06.030LIU X, QIU Y Y, SHENG Y.Stiffness enhancement and motion control of a 6-DOF wire-driven parallel manipulator with redundant actuations for wind tunnels[J].Acta Aeronautica et Astronautica Sinica, 2009, 30(6):1156-1164(in Chinese). doi: 10.3321/j.issn:1000-6893.2009.06.030 [24] WANG X G, PENG M J, HU Z H, et al.Feasibility investigation of large scale model suspended by cable driven parallel robot in hypersonic wind tunnel test[J].Proceedings of the Institution of Mechanical Engineers, Part G:Journal of Aerospace Engineering, 2017, 231(13):2375-2383. doi: 10.1177/0954410016662067 [25] 彭苗娇, 王晓光, 林麒.风洞试验WDPR支撑牵引绳与模型耦合振动研究[J].振动工程学报, 2017, 30(1):140-148. http://d.old.wanfangdata.com.cn/Periodical/zdgcxb201701019PENG M J, WANG X G, LIN Q.Coupled vibration between wires and aircraft model of WDPR in wind tunnel test[J].Journal of Vibration Engineering, 2017, 30(1):140-148(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/zdgcxb201701019 [26] HEYLEN W, LAMMENS S, SAS P.模态分析理论与试验[M].白化同, 郭继忠, 译.北京: 北京理工大学出版社, 2001: 4-5.HEYLEN W, LAMMENS S, SAS P.Modal analysis theory and testing[M].BAI H T, GUO J Z, translated.Beijing: Beijing Institute of Technology Press, 2001: 4-5(in Chinese). [27] DE SILVA C W.Vibration damping, control, and design[M].Boca Raton:CRC Press, 2007:1-18. [28] 冀洋锋.绳系并联机器人支撑及相关模型风洞试验问题研究[D].厦门: 厦门大学, 2017.JI Y F.Research on wire-driven parallel robot suspension and the wind tunnel test with related model[D].Xiamen: University of Xiamen, 2017(in Chinese). [29] 范洁川.风洞试验手册[M].北京:航空工业出版社, 2002:322.FAN J C.Handbook of wind tunnel test[M].Beijing:Aviation Industry Press, 2002:322(in Chinese). -

 下载:
下载:




 点击查看大图
点击查看大图

计量
- 文章访问数: 655
- HTML全文浏览量: 58
- PDF下载量: 269
- 被引次数: 0
