



Time-varying formation control for UAV swarm with directed interaction topology and communication delay
-
摘要:
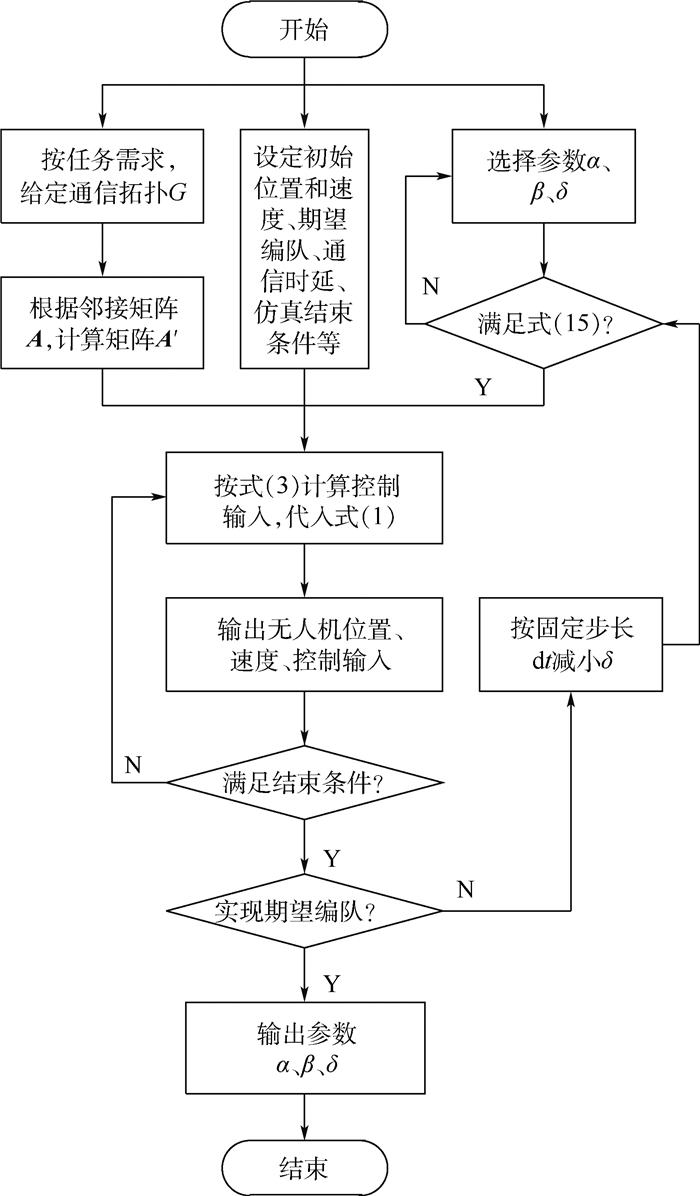
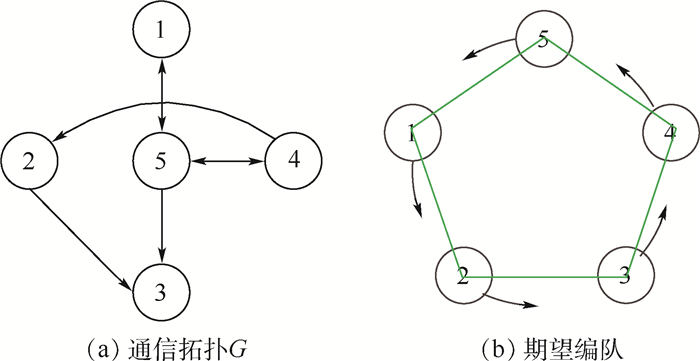
针对无人机(UAV)集群在有向通信拓扑和存在通信时延条件下的时变编队控制问题进行了研究。建立了无人机集群二阶离散时间系统模型,基于无人机自身实时信息和相邻无人机带通信时延的状态信息,设计了分布式编队控制协议。通过理论分析,得到了无人机集群能够实现时变编队的充要条件,给出了可行的期望编队的表达式。在集群通信拓扑有生成树的条件下,分析了控制协议中待定参数和状态更新周期满足的耦合约束条件,并给出了参数设计的流程。仿真结果表明:即使在较大的通信时延下,所设计的控制协议也能实现无人机集群时变编队控制,验证了理论分析的正确性和有效性。
-
关键词:
- 无人机(UAV)集群 /
- 编队控制 /
- 通信时延 /
- 通信拓扑 /
- 一致性控制
Abstract:Time-varying formation control problems for unmanned aerial vehicles (UAV) swarm with directed interaction topology and communication delay are investigated. The UAV swarm is modeled as second-order discrete-time system on the formation control level and a distributed formation control protocol is designed by utilizing the instantaneous state information of UAV itself and the communication delayed state information of its neighbors. Through theoretical analysis, the necessary and sufficient conditions for UAV swarm to achieve time-varying formation are obtained, and an explicit description of the feasible time-varying formation set is given. Under the condition that the swarm communication topology has a spanning tree, the constraints of undetermined parameters and state update period in the control protocol are analyzed, and the flowchart of parameter design is given. Simulation results show that the designed control protocol can achieve time-varying formation control of UAV swarm even with relatively large communication delay, and thus the correctness and effectiveness of the theoretical analysis are verified.
-
[1] 梁晓龙, 孙强, 尹忠海, 等.大规模无人系统集群智能控制方法综述[J].计算机应用研究, 2015, 32(1):11-16. doi: 10.3969/j.issn.1001-3695.2015.01.003LIANG X L, SUN Q, YIN Z H, et al.Review on large-scale unmanned system swarm intelligence control method[J].Application Research of Computers, 2015, 32(1):11-16(in Chinese). doi: 10.3969/j.issn.1001-3695.2015.01.003 [2] 梁晓龙, 何吕龙, 张佳强, 等.航空集群构型控制及其演化方法研究[J].中国科学:技术科学, 2019, 49(3):277-287.LIANG X L, HE L L, ZHANG J Q, et al.Configuration control and evolutionary mechanism of aircraft swarm[J].Science Sinica Technologica, 2019, 49(3):277-287(in Chinese). [3] HE L L, BAI P, LIANG X L, et al.Feedback formation control of UAV swarm with multiple implicit leaders[J].Aerospace Science and Technology, 2018, 72:327-334. doi: 10.1016/j.ast.2017.11.020 [4] REN W.Consensus strategies for cooperative control of vehicle formations[J].IET Control Theory & Applications, 2007, 1(2):505-512. doi: 10.1049-iet-cta-20050401/ [5] 胡利平, 梁晓龙, 张佳强.基于Multi-Agent的航空集群系统重构机理研究[J].火力与指挥控制.2016, 41(11):80-84. doi: 10.3969/j.issn.1002-0640.2016.11.019HU L P, LIANG X L, ZHANG J Q.Research on aircraft swarms system reconstruction mechanism based on Multi-Agent[J].Fire Control & Command Control, 2016, 41(11):80-84(in Chinese). doi: 10.3969/j.issn.1002-0640.2016.11.019 [6] DONG X W, ZHOU Y, REN Z, et al.Time-varying formation tracking for second-order multi-agent systems subjected to switching topologies with application to quadrotor formation flying[J].IEEE Transactions on Industrial Electronics, 2017, 64(6):5014-5024. doi: 10.1109/TIE.2016.2593656 [7] 段海滨, 李沛.基于生物群集行为的无人机集群控制[J].科技导报, 2017, 35(7):17-25. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kjdb201707006DUAN H B, LI P.Autonomous control for unmanned aerial vehicle swarms based on biological collective behaviors[J].Science & Technology Review, 2017, 35(7):17-25(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kjdb201707006 [8] 周欢, 赵辉, 韩统, 等.基于规则的无人机集群飞行与规避协同控制[J].系统工程与电子技术, 2016, 38(6):1374-1382. http://d.old.wanfangdata.com.cn/Periodical/xtgcydzjs201606024ZHOU H, ZHAO H, HAN T, et al.Cooperative flight and evasion control of UAV swarm based on rules[J].Systems Engineering and Electronics, 2016, 38(6):1374-1382(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/xtgcydzjs201606024 [9] TRON R, THOMAS J, LOIANNO G, et al.A distributed optimization framework for localization and formation control:Applications to vision-based measurements[J].IEEE Control Systems Magazine, 2016, 36(4):22-44. doi: 10.1109/MCS.2016.2558401 [10] 李炳乾, 董文瀚, 马小山.无人机编队保持反步容错控制[J].兵工学报, 2018, 39(11):2172-2184. doi: 10.3969/j.issn.1000-1093.2018.11.011LI B Q, DONG W H, MA X S.Back-stepping-fault-tolerant control for keeping the formation of unmanned aerial vehicles[J].Acta Armamentarii, 2018, 39(11):2172-2184(in Chinese). doi: 10.3969/j.issn.1000-1093.2018.11.011 [11] DONG Y, HU X M.Distributed control of periodic formations for multiple under-actuated autonomous vehicles[J].IET Control Theory & Applications, 2017, 11(1):66-72. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=7dac3a7217e4ce6575cb6673270c0f65 [12] KHALILI M, ZHANG X D, CAO Y C, et al.Distributed adaptive fault-tolerant leader-following formation control of nonlinear uncertain second-order multi-agent systems[J].International Journal of Robust and Nonlinear Control, 2018, 28(15):4287-4308. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=03cd020df523f558ce1eff480638d8d7 [13] LI Z K, REN W, LIU X D, et al.Distributed containment control of multi-agent systems with general linear dynamics in the presence of multiple leaders[J].International Journal of Robust and Nonlinear Control, 2013, 23(5):534-547. doi: 10.1002/rnc.1847 [14] SEO J, KIM Y, KIM S, et al.Consensus-based reconfigurable controller design for unmanned aerial vehicle formation flight[J].Proceedings of the Institution of Mechanical Engineers, 2012, 226(7):817-829. doi: 10.1177/0954410011415157 [15] RAHIMI R, ABDOLLAHI F, NAQSHI K.Time-varying formation control of a collaborative heterogeneous multi agent system[J].Robotics and Autonomous Systems, 2014, 62(12):1799-1805. doi: 10.1016/j.robot.2014.07.005 [16] ANTONELLI G, ARRICHIELLO F, CACCAVALE F, et al.Decentralized time-varying formation control for multi-robot systems[J].The International Journal of Robotics Research, 2014, 33(7):1029-1043. doi: 10.1177/0278364913519149 [17] GE M F, GUAN Z H, YANG C, et al.Time-varying formation tracking of multiple manipulators via distributed finite-time control[J].Neurocomputing, 2016, 202:20-26. doi: 10.1016/j.neucom.2016.03.008 [18] 周绍磊, 祁亚辉, 张雷, 等.切换拓扑下无人机集群系统时变编队控制[J].航空学报, 2017, 38(4):320452. http://d.old.wanfangdata.com.cn/Periodical/hkxb201704025ZHOU S L, QI Y H, ZHANG L, et al.Time-varying formation control of UAV swarm systems with switching topologies[J].Acta Aeronautica et Astronautica Sinica, 2017, 38(4):320452(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/hkxb201704025 [19] HOSSEINZADEH Y M, MAHBOOBI E R.Distributed predictive formation control of networked mobile robots subject to communication delay[J].Robotics and Autonomous Systems, 2017, 91:194-207. doi: 10.1016/j.robot.2017.01.005 [20] HAN L, DONG X W, LI Q D, et al.Formation tracking control for time-delayed multi-agent systems with second-order dynamics[J].Chinese Journal of Aeronautics, 2017, 30(1):348-357. doi: 10.1016/j.cja.2016.10.019 [21] XUE R B, SONG J M, CAI G H.Distributed formation flight control of multi-UAV system with nonuniform time-delays and jointly connected topologies[J].Proceedings of the Institution of Mechanical Engineers, 2016, 230(10):1871-1881. doi: 10.1177/0954410015619446 [22] LI P, QIN K Y, PU H P.Distributed robust time-varying formation control for multiple unmanned aerial vehicles systems with time-delay[C]//Proceedings of 2017 29th Chinese Control and Decision Conference.Piscataway, NJ: IEEE Press, 2017: 1539-1544. [23] 朱创创, 梁晓龙, 张佳强, 等.无人机集群编队控制演示验证系统[J].北京航空航天大学学报, 2018, 44(8):1739-1747. doi: 10.13700/j.bh.1001-5965.2017.0600ZHU C C, LIANG X L, ZHANG J Q, et al.Demonstration and verification system for UAV swarm formation control[J].Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(8):1739-1747(in Chinese). doi: 10.13700/j.bh.1001-5965.2017.0600 [24] LI S B, ZHANG J, LI X L, et al.Formation control of heterogeneous discrete-time nonlinear multi-agent systems with uncertainties[J].IEEE Transactions on Industrial Electronics, 2017, 64(6):4730-4740. doi: 10.1109/TIE.2017.2674590 [25] ZHANG W L, LIU J C, WANG H H.Ultra-fast formation control of high-order discrete-time multi-agent systems based on multi-step predictive mechanism[J].ISA Transactions, 2015, 58:165-172. doi: 10.1016/j.isatra.2015.05.008 [26] NAKAI M E, INOUE R S, TERRA M H, et al.Robust discrete-time markovian control for wheeled mobile robot formation:A fault tolerant approach[J].Journal of Intelligent & Robotic Systems, 2018, 91(2):233-247. http://cn.bing.com/academic/profile?id=3d8dcead6505f1fb67192519a1731081&encoded=0&v=paper_preview&mkt=zh-cn [27] XU J, ZHANG G L, ZENG J, et al.Consensus based second order discrete-time multi-agent systems formation control with time-delays[C]//Proceedings of IEEE International Conference on Information and Automation.Piscataway, NJ: IEEE Press, 2015: 2626-2631. [28] XU G, HUANG C, ZHAI G.A necessary and sufficient condition for designing formation of discrete-time multi-agent systems with delay[J].Neurocomputing, 2018, 315:48-58. doi: 10.1016/j.neucom.2018.06.007 [29] REN W, BEARD R W.Consensus seeking in multiagent systems under dynamically changing interaction topologies[J].IEEE Transactions on Automatic Control, 2005, 50(5):655-661. doi: 10.1109/TAC.2005.846556 -

 下载:
下载:





 点击查看大图
点击查看大图

计量
- 文章访问数: 1068
- HTML全文浏览量: 142
- PDF下载量: 478
- 被引次数: 0
