



-
摘要:
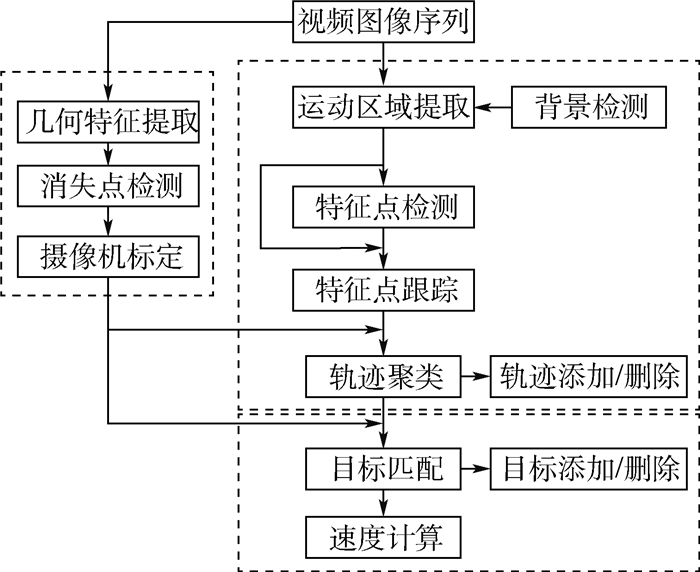
为构建有效的机场场面视觉监视系统,提出了一种基于特征点持续跟踪与分析的移动目标速度测量方法。首先,利用场面几何特征对摄像机进行标定;然后,基于光流场对图像运动区域的特征点进行持续跟踪,在此基础上通过特征点轨迹聚类区分不同移动目标;最后,根据特征点高度与运动距离完成速度测量。所提方法能够利用机场场面摄像机获取的低视角单目视频图像,对移动目标的运动速度进行准确测量。基于广州白云国际机场的场面运行视频进行了仿真分析,验证了所提方法在低视角速度测量方面的可行性与优势。
Abstract:To build an effective airport surface visual surveillance system, a moving object speed measurement method based on long-term feature point tracking and analysis is proposed. First, the surveillance camera is calibrated using geographic features on the airport surface. Then, the feature points in motion regions of the images are continuously tracked via optical flow fields. On this basis, different moving objects are identified by clustering the feature point trajectories. Finally, the speeds of the moving objects are measured according to the heights and moving distances of the feature points. The proposed method can accurately measure the object moving speeds using low-camera-angle monocular video images obtained by cameras installed on the airport surface. Simulation studies are conducted based on the surface operation videos of Guangzhou Baiyun International Airport, which verify the feasibility and advantages of the proposed method for low-camera-angle speed measurement.
-

图 2 空间坐标系与图像坐标系位置关系示意图
Figure 2. Illustration of position relation between spatial coordinate system and image coordinate system
表 1 场面运行视频数据集
Table 1. Dataset of surface operation videos
视频名称 分辨率 帧数 航空器个数 车辆个数 cam2513-视频1 1024×576 401 1 0 cam2513-视频2 1024×576 101 1 0 cam2513-视频3 1024×576 574 1 4 cam9915-视频1 1024×576 801 1 1 cam9915-视频2 1024×576 451 0 2 cam9915-视频3 1024×576 551 2 1  下载: 导出CSV
下载: 导出CSV
表 2 摄像机标定结果
Table 2. Camera calibration results
摄像机 消失点坐标 焦距 高度/m cam2513 (7037.1, 20.3), (-117.2, 126.1), (862.8, 24017.6) 2 015.5 8.1 cam9915 (-5026.3, -138.6), (722.7, 213.3), (-281.1, 13243.3) 1065.4 8.9
下载: 导出CSV
表 3 移动目标速度测量误差均值与方差
Table 3. Mean and variance of speed measurement errors for moving objects
视频名称 移动目标 特征点 边界框 均值/ (m· s-1) 方差/ (m· s-1)2 均值/ (m· s-1) 方差/ (m· s-1)2 cam2513-视频1 航空器 -1.1 0.3 13.8 600.4 cam2513-视频2 航空器 0 0 2.4 8.7 航空器 -0.1 0.2 2.6 120.2 cam2513-视频3 车辆1 1.2 2.4 2.0 25.3 车辆2 -0.8 0.1 -0.3 2.9 车辆3 -1.9 0.3 -2.3 5.2 cam9915-视频1 航空器 -0.9 0.9 8.3 66.0 车辆 -0.6 0 0.6 2.4 cam9915-视频2 车辆1 0.2 0.1 0.4 4.3 车辆2 0.6 0.1 0.4 1.3 cam9915-视频3 航空器1 -0.1 0.2 0.6 2.9 航空器2 -0.5 0.2 3.7 30.9 车辆 -0.5 0.1 0.9 1.8
下载: 导出CSV
-
[1] CERMENO E, PEREZ A, SIGUENZA J A.Intelligent video surveillance beyond robust background modeling[J].Expert Systems with Applications, 2018, 91:138-149. [2] 罗晓, 卢宇, 吴宏刚.采用多视频融合的机场场面监视方法[J].电讯技术, 2011, 51(7):128-132.LUO X, LU Y, WU H G.A novel airport surface surveillance method using multi-video fusion[J].Telecommunication Engineering, 2011, 51(7):128-132(in Chinese). [3] VIDAKIS D G, KOSMOPOULOS D I.Facilitation of air traffic control via optical character recognition-based aircraft registration number extraction[J].IET Intelligent Transport Systems, 2018, 12(8):965-975. [4] LOPEZ-ARAQUISTAIN J, JARAMA A J, BESADA J A, et al.A new approach to map-assisted bayesian tracking filtering[J].Information Fusion, 2019, 45:79-95. [5] 唐勇, 胡明华, 吴洪刚, 等.一种在机场视频中实现飞机自动挂标牌的新方法[J].江苏大学学报(自然科学版), 2013, 34(6):681-686.TANG Y, HU M H, WU H G, et al.An automatical labeling aircraft method for airport video monitoring[J].Journal of Jiangsu University(Natural Science Edition), 2013, 34(6):681-686(in Chinese). [6] SAIVADDI V, LU H L.Computer vision based surveillance concept for airport ramp operations[C]//Proceedings of 2013 IEEE/AIAA 32nd Digital Avionics Systems Conference(DASC).Piscataway, NJ: IEEE Press, 2013: 1-35. [7] LU H L, CHENG V H, TSAI J, et al.Airport gate operation monitoring using computer vision techniques[C]//Proceedings of 16th AIAA Aviation Technology, Integration, and Operations Conference.Reston: AIAA, 2016: 1-12. [8] DONADIO F, FREJAVILLE J, LARNIER S, et al.Artificial intelligence and collaborative robot to improve airport operations[C]//14th International Conference on Remote Engineering and Virtual Instrumentation(REV).Berlin: Springer, 2018: 973-986. [9] LU H L, KWAN J, FONG A, et al.Field testing of vision-based surveillance system for ramp area operations[C]//Proceedings of 2018 Aviation Technology, Integration, and Operations Conference.Reston: AIAA, 2018: 1-11. [10] CHEN J, WEISZER M, STEWART P, et al.Toward a more realistic, cost effective and greener ground movement through active routing:Part 1-Optimal speed profile generation[J].IEEE Transactions on Intelligent Transportation Systems, 2016, 17(5):1196-1209. [11] KANHERE N K, BIRCHFIELD S T.Real-time incremental segmentation and tracking of vehicles at low camera angles using stable features[J].IEEE Transactions on Intelligent Transportation Systems, 2008, 9(1):148-160. [12] 詹昭焕, 韩松臣, 李炜, 等.基于倾向流和深度学习的机场运动目标检测[J].交通信息与安全, 2019, 37(1):49-57.ZHAN Z H, HAN S C, LI W, et al.A target detection method of moving objects at airport based on streak flow and deep learning[J].Journal of Transport Information and Safety, 2019, 37(1):49-57(in Chinese). [13] BARNICH O, VAN DROOGENBROECK M.ViBe:A universal background subtraction algorithm for video sequences[J].IEEE Transactions on Image Processing, 2011, 20(6):1709-1724. [14] ROSTEN E, PORTER R, DRUMMOND T.Faster and better:A machine learning approach to corner detection[J].IEEE Transactions on Pattern Analysis and Machine Intelligence, 2010, 32(1):105-119. [15] ILG E, MAYER N, SAIKIA T, et al.FlowNet 2.0: Evolution of optical flow estimation with deep networks[C]//Proceedings of IEEE Conference on Computer Vision and Pattern Recognition(CVPR).Piscataway, NJ: IEEE Press, 2017: 1647-1655. [16] OCHS P, MALIK J, BROX T.Segmentation of moving objects by long term video analysis[J].IEEE Transactions on Pattern Analysis and Machine Intelligence, 2014, 36(6):1187-1200. [17] TOLDO R, FUSIELLO A.Robust multiple structures estimation with J-linkage[C]//Proceedings of European Conference on Computer Vision.Berlin: Springer, 2008: 537-547. [18] REDMON J, DIVVALA S, GIRSHICK R, et al.You only look once: Unified, real-time object detection[C]//Proceedings of IEEE Conference on Computer Vision and Pattern Recognition(CVPR).Piscataway, NJ: IEEE Press, 2016: 779-788. [19] DANELLJAN M, BHAT G, KHAN F S, et al.ECO: Efficient convolution operators for tracking[C]//Proceedings of IEEE Conference on Computer Vision and Pattern Recognition(CVPR).Piscataway, NJ: IEEE Press, 2017: 6638-6646. -

 下载:
下载:







 点击查看大图
点击查看大图
计量
- 文章访问数: 836
- HTML全文浏览量: 215
- PDF下载量: 148
- 被引次数: 0
