



-
摘要:
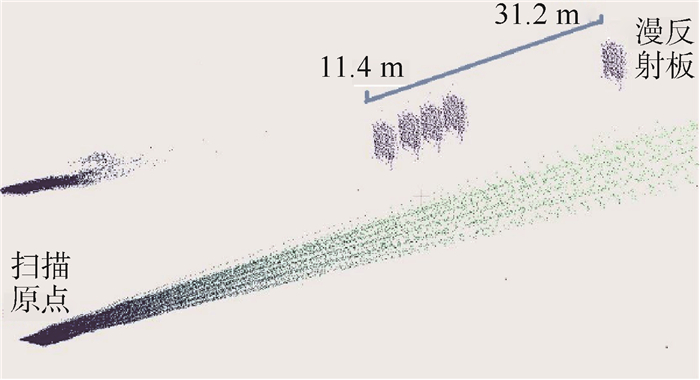
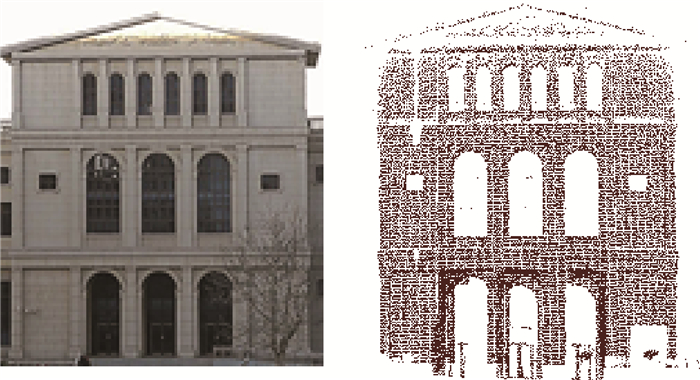
针对脉冲激光雷达测距精度受限于距离动态变化导致的行走误差和时刻抖动误差的问题,设计了一种基于自动增益控制(AGC)技术及恒比定时鉴别(CFD)技术的激光雷达测距系统,可适应进程动态范围的测量目标,并提高测距精度。激光雷达测距系统在10~100 m的静态测距实验中,测距精度达到厘米级别。在动态三维扫描实验中,室内测量得到11.4~31.2 m范围内靶标的平面拟合均方根误差为2.05~4.35 cm,室外测量得到距离15.97 m处目标平面拟合均方根误差为3.54 cm。
-
关键词:
- 激光雷达 /
- 近程动态范围 /
- 自动增益控制(AGC) /
- 恒比定时鉴别(CFD) /
- 测距系统 /
- 测距精度
Abstract:In this paper, a ranging system of LiDAR based on automatic gain control (AGC) circuit and constant fraction discriminator (CFD) circuit is designed for the problem that pulsed time of flight LiDAR ranging precision is limited by the walking error and time jitter error caused by dynamic range changes. It can adapt to measure the distance in short-distance dynamic range with better ranging precision. Through a series of experiments, within 10-100 m detection, the ranging precision is estimated to be on centimeter-scale. In the experiment of three-dimensional dynamic scanning, the planer fitting root mean square error of the target at 11.4-31.2 m achieves 2.05-4.35 cm indoors, and the planer fitting root mean square error of the target at 15.97 m achieves 3.54 cm outdoors.
-

图 7 10~100 m测距精密度及校正后准确度变化曲线
Figure 7. Change curves of 10-100 m ranging precision and corrected accuracy
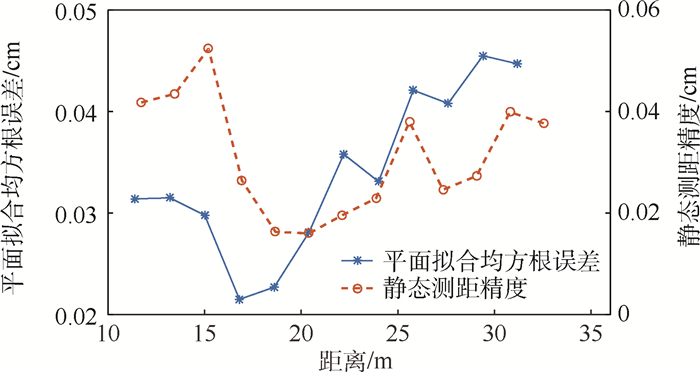
图 9 平面拟合均方根误差与静态测距精度对比
Figure 9. Comparison of planar fitting root mean square error and static ranging precision

图 11 截取点云到拟合平面距离的误差分布
Figure 11. Error distribution of distance from interception point cloud to fitted plane
表 1 脉冲激光器主要指标
Table 1. Pulse laser main indicators
指标 数值 激光波长/nm 1 064 单脉冲能量/μJ 16.6 脉冲宽度/ns 10 重复频率/kHz 1~5 发散角/mrad 1.5 平均功率/mW 93.55  下载: 导出CSV
下载: 导出CSV
-
[1] AMANN M C, BOSCH T M, LESCURE M, et al.Laser ranging:A critical review of unusual techniques for distance measurement[J].Optical Engineering, 2001, 40(1):10-19. doi: 10.1117/1.1330700 [2] NISSINEN J, KOSTAMOVAARA J.A high repetition rate CMOS driver for high-energy sub-ns laser pulse generation in SPAD-based time-of-flight range finding[J].IEEE Sensors Journal, 2016, 16(6):1628-1633. doi: 10.1109/JSEN.2015.2503774 [3] PERENZONI D, GASPARINI L, MASSARI N, et al.Depth-range extension with folding technique for SPAD-based TOF LIDAR systems[C]//13th IEEE Sensors Conference.Piscataway, NJ: IEEE Press, 2014: 622-624. [4] 许贤泽, 翁名杰, 徐逢秋, 等.正交调制降频相位式激光测距[J].光学精密工程, 2017, 25(8):1979-1986.XU X Z, WENG M J, XU F Q, et al.Phase laser ranger based on quadrature modem and frequency reduction[J].Optics and Precision Engineering, 2017, 25(8):1979-1986(in Chinese). [5] 贾豫东, 欧攀, 张春熹, 等.全光纤M-Z干涉仪激光器鉴频系统[J].北京航空航天大学学报, 2009, 35(12):1421-1424. https://bhxb.buaa.edu.cn/CN/Y2009/V35/I12/1421JIA Y D, OU P, ZHANG C X, et al.All-fiber M-Z interferometer laser frequency discrimination system[J].Journal of Beijing University of Aeronautics and Astronautics, 2009, 35(12):1421-1424(in Chinese). https://bhxb.buaa.edu.cn/CN/Y2009/V35/I12/1421 [6] LIU H B, FEI F, SHI X S, et al.Calibration method and uncertainty analyses of pulse laser ranging error[J].Journal of Astronautic Metrology & Measurement, 2016, 36(2):16-21. [7] 刘鹏, 栗苹, 陈慧敏.提高近程脉冲激光探测系统精度研究[J].激光杂志, 2010, 31(1):14-16. doi: 10.3969/j.issn.0253-2743.2010.01.006LIU P, LI P, CHEN H M.Research on improving the accuracy of short range pulse laser detection system[J].Laser Journal, 2010, 31(1):14-16(in Chinese). doi: 10.3969/j.issn.0253-2743.2010.01.006 [8] 谢庚承, 叶一东, 李建民, 等.脉冲激光测距回波特性及测距误差研究[J].中国激光, 2018, 45(6):0610001.XIE G C, YE Y D, LI J M, et al.Echo characteristics and range error for pulse laser ranging[J].Chinese Journal of Lasers, 2018, 45(6):0610001(in Chinese). [9] 徐正平, 沈宏海, 姚园, 等.直接测距型无扫描激光主动成像验证系统[J].光学精密工程, 2016, 24(2):251-259.XU Z P, SHEN H H, YAO Y, et al.Scannerless laser active imaging validing system by directly ranging[J].Optics and Precision Engineering, 2016, 24(2):251-259(in Chinese). [10] XIAO J, LOPEZ M, HU X, et al.A continuous wavelet transform-based modulus maxima approach for the walk error compensation of pulsed time-of-flight laser rangefinders[J].Optik International Journal for Light and Electron Optics, 2016, 127(4):1980-1987. doi: 10.1016/j.ijleo.2015.11.052 [11] 王永志, 孙超君, 段存高, 等.基于回波强度的激光测距误差补偿算法研究[J].制导与引信, 2017, 38(3):35-43. doi: 10.3969/j.issn.1671-0576.2017.03.008WANG Y Z, SUN C J, DUAN C G, et al.Algorithm reasearch of error compensation for laser ranging based on echo intensity[J].Guidance and Fuze, 2017, 38(3):35-43(in Chinese). doi: 10.3969/j.issn.1671-0576.2017.03.008 [12] LIM H.Constant fraction discriminator involving automatic gain control to reduce time walk[J].IEEE Transactions on Nuclear Science, 2014, 61(4):2351-2356. doi: 10.1109/TNS.2014.2339362 [13] 朱福, 林一楠.一种提高脉冲激光测距精度的方法[J].光电技术应用, 2011, 26(2):42-44. doi: 10.3969/j.issn.1673-1255.2011.02.012ZHU F, LIN Y N.Method to improve the accuracy of pulse laser ranging[J].Application of Optoelectronic Technology, 2011, 26(2):42-44(in Chinese). doi: 10.3969/j.issn.1673-1255.2011.02.012 [14] 冯刚, 冯国斌, 邵碧波, 等.高重复频率脉冲激光能[J].中国光学, 2013, 6(2):196-200.FENG G, FENG G B, SHAO B B, et al.Energy measurement of high-repetition-rate pulsed laser[J].Chinese Optics, 2013, 6(2):196-200(in Chinese). [15] LI X, WANG H, YANG B, et al.Influence of time-pickoff circuit parameters on LiDAR range precision[J].Sensors, 2017, 17(10):2369. doi: 10.3390/s17102369 [16] 冯国旭, 常保成.高精度激光测距技术研究[J].激光与红外, 2007, 37(11):1137-1140. doi: 10.3969/j.issn.1001-5078.2007.11.003FENG G X, CHANG B C.Study of high precision laser ranging technology[J].Laser & Infrared, 2007, 37(11):1137-1140(in Chinese). doi: 10.3969/j.issn.1001-5078.2007.11.003 [17] GAUGHAN W, BUTKA B.Using an FPGA digital clock manager to generate sub-nanosecond phase shifts for lidar applications[C]//Southern Programmable Logic Conference.Piscataway, NJ: IEEE Press, 2010: 163-166. [18] LI X, YANG B, XIE X, et al.Influence of waveform characteristics on LiDAR ranging accuracy and precision[J].Sensors, 2018, 18(4):1156. doi: 10.3390/s18041156 [19] 刘红博, 费丰, 史学舜, 等.脉冲激光测距误差标定及不确定度分析[J].宇航计测技术, 2016, 36(2):16-21. doi: 10.3969/j.issn.1000-7202.2016.02.007LIU H B, FEI F, SHI X S, et al.Error calibration and uncertainty analysis of pulsed laser ranging[J].Aerospace Surveying Technology, 2016, 36(2):16-21(in Chinese). doi: 10.3969/j.issn.1000-7202.2016.02.007 -

 下载:
下载:



 点击查看大图
点击查看大图

计量
- 文章访问数: 1356
- HTML全文浏览量: 199
- PDF下载量: 213
- 被引次数: 0
