



-
摘要:
针对目前软体机器人缺乏变形和接触力方面理论研究的问题,以软体夹持器为研究对象,开展了纤维增强型软体夹持器变形及末端接触力的研究。首先设计了气动软体夹持器,该夹持器由纤维增强型单向弯曲驱动器、接触气囊以及单元的连接装置组成;其次基于Yeoh模型、Neo-Hookean模型分别建立了弯曲驱动器驱动压强与弯曲变形圆心角的非线性数学模型和弯曲驱动器末端接触力理论模型;然后开展了软体夹持器变形和末端接触力的仿真及实验,结果证明了理论模型的正确性;最后进行了纤维增强结构对软体夹持器变形和末端接触力影响的研究,实验结果表明:纤维增强结构能大幅度提高软体夹持器的变形和末端接触力。上述研究为其他纤维增强型软体夹持器变形及末端接触力的研究提供了理论基础。
Abstract:In order to solve the problem of lacking the research on the deformation and end contact force of soft robotics, a soft gripper is taken as the research object, and the research on the deformation and end contact force of fiber-reinforced soft gripper is carried out. Firstly, a soft pneumatic gripper is designed, which is composed of a unidirectional bending drive with a fiber-reinforced structure, an axially elongated contact airbag and a unitary connecting device. Secondly, a nonlinear mathematical model of curved center angle of a soft drive actuated by specific pressure is established, which is based on the Yeoh model. Based on the Neo-Hookean model, the theoretical model of the end contact force of the bending actuator is established. Then, a finite element simulation and experimental validation of the soft gripper are carried out to verify the correctness of the theoretical model. Finally, the study on the effect of fiber-reinforced structure on the deformation and end contact force of gripper is carried out. Experimental results show that fiber-reinforced structure can improve the deformation and end contact force of the soft gripper greatly. This research provides a theoretical basis for the research on the deformation and end contact force of other fiber-reinforced soft grippers.
-
Key words:
- fiber-reinforced /
- soft gripper /
- Yeoh model /
- Neo-Hookean model /
- deformation /
- end contact force
-

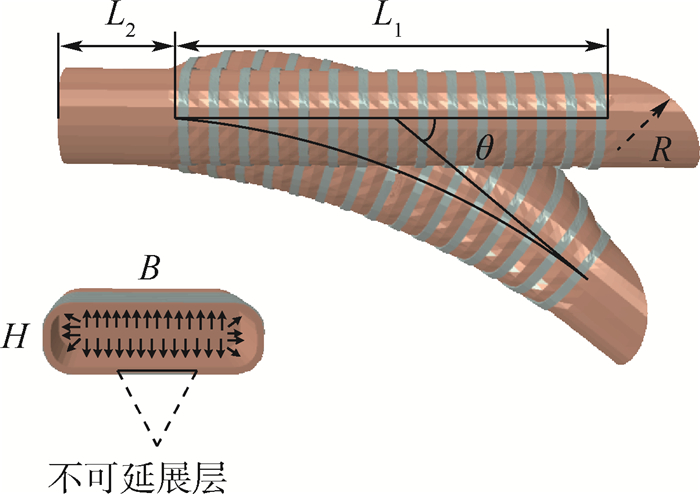
图 1 纤维增强型软体夹持器结构示意图
Figure 1. Schematic diagram of structure of a fiber-reinforced soft gripper

图 5 变形前后的单向弯曲驱动器的尺寸
Figure 5. Size of unidirectional bending actuator before and after deformation

图 6 单向弯曲驱动器弯曲力矩分析
Figure 6. Analysis of unidirectional bending actuator bending torque

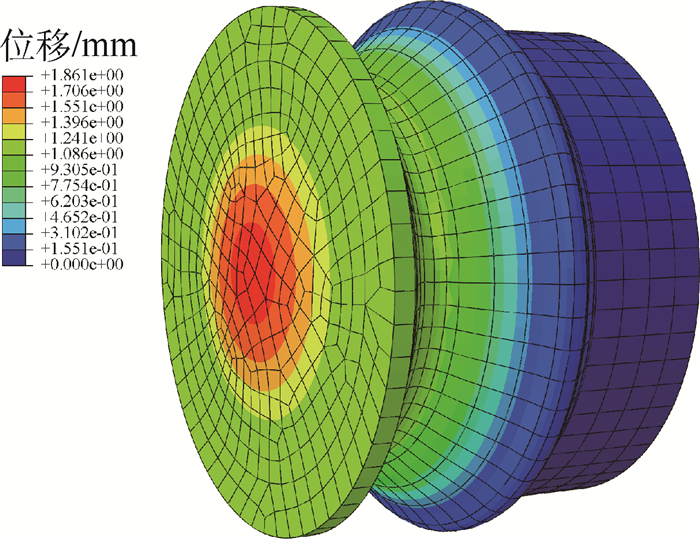
图 7 单向弯曲驱动器弯曲仿真示意图
Figure 7. Schematic diagram of unidirectional bending actuator bending simulation

图 10 单向弯曲驱动器弯曲变形圆心角示意图
Figure 10. Schematic diagram of bending deformation central angle of unidirectional bending actuator

图 11 单向弯曲驱动器弯曲变形圆心角的理论计算值、有限元仿真值和实验值
Figure 11. Theoretical calculation values, finite element simulation values and experimental values of bending deformation central angle of unidirectional bending actuator

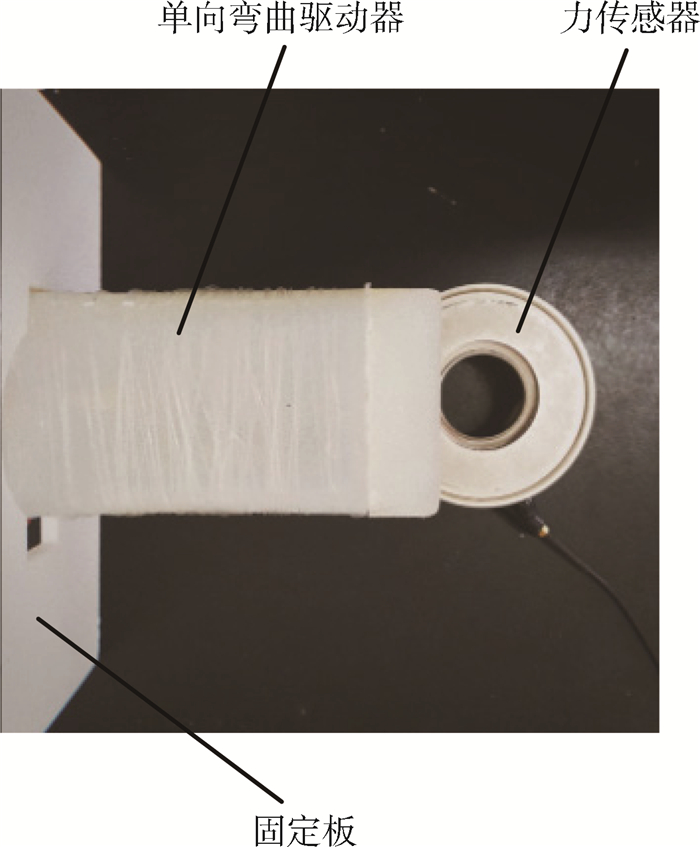
图 12 单向弯曲驱动器末端接触力实验
Figure 12. Experiment on end contact force of unidirectional bending actuator

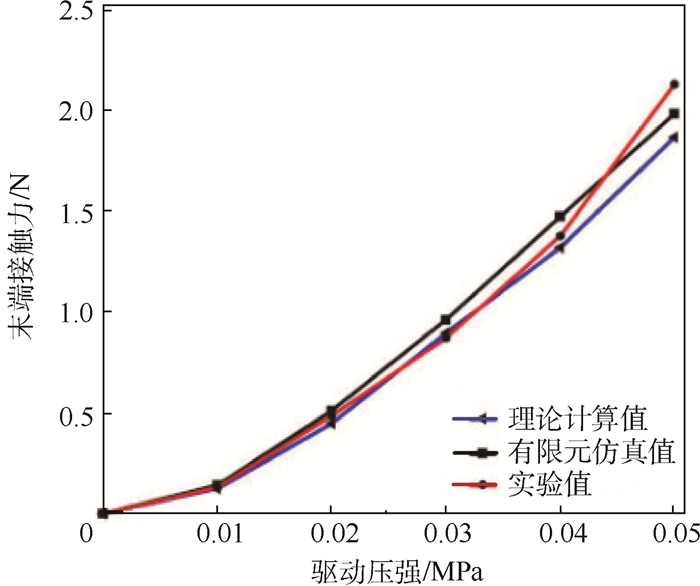
图 13 单向弯曲驱动器末端接触力的理论计算值、有限元仿真值和实验值
Figure 13. Theoretical calculation values, finite element simulation values and experimental values of end contact force of unidirectional bending actuator

图 15 接触气囊末端接触力实验值与有限元仿真值对比
Figure 15. Comparison of end contact force of contact airbag between experiment and finite element simulation

图 16 线圈匝数对单向弯曲驱动器弯曲变形圆心角的影响
Figure 16. Influence of coil number on bending deformation central angle of unidirectional bending actuator

图 17 单向弯曲驱动器弯曲变形圆心角拟合曲线
Figure 17. Fitting curve with bending deformation central angle of unidirectional bending actuator

图 18 单向弯曲驱动器末端接触力拟合曲线
Figure 18. Fitting curve with end contact force of unidirectional bending actuator
表 1 单向弯曲驱动器结构参数
Table 1. Structure parameters of unidirectional bending actuator
参数 数值 驱动器空腔长度L1/mm 45 驱动器总宽B/mm 30 驱动器总高H/mm 10 驱动器末端长度L2/mm 10 驱动器接触端半径R/mm 10 气囊壁厚t/mm 1 线圈匝数N 15  下载: 导出CSV
下载: 导出CSV
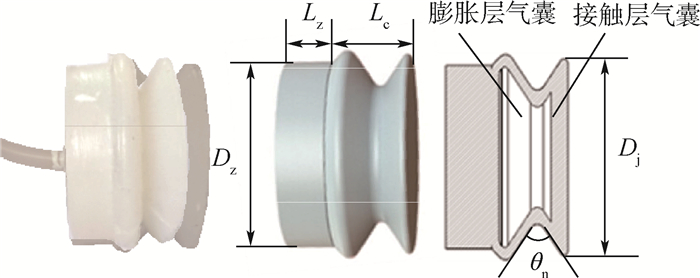
表 2 接触气囊结构参数
Table 2. Contact airbag structure parameters
参数 数值 接触层气囊直径Dj/mm 25 柱状固定末端直径Dz/mm 24 双层气囊初始长度Lc/mm 10 柱状固定末端长度Lz/mm 6 气囊层间夹角θn/(°) 67
下载: 导出CSV
表 3 单向弯曲驱动器弯曲变形圆心角对比
Table 3. Comparison of bending deformation central angle of unidirectional bending actuator
P/MPa θJ/(°) θF/(°) θS/(°) 0.029 60.123 3 67.115 8 61.5 0.030 66.747 3 69.290 0 65.0 0.031 73.452 1 71.418 8 68.0 0.032 80.234 4 73.547 9 71.5
下载: 导出CSV
表 4 单向弯曲驱动器末端接触力对比
Table 4. Comparison of end contact force of unidirectional bending actuator
P/MPa FJ/N FF/N FS/N 0.01 0.124 896 0.142 313 0.13 0.02 0.449 792 0.513 339 0.49 0.03 0.899 584 0.966 668 0.88 0.04 1.324 480 1.479 03 1.38 0.05 1.874 688 1.991 392 2.14
下载: 导出CSV
表 5 线圈匝数对单向弯曲驱动器弯曲程度的影响
Table 5. Influence of coil number on bending degree of unidirectional bending actuator
N P/MPa θF/(°) θS/(°) 相对误差/% 5 0.02 20.08 19.14 4.91 10 0.02 39.69 37.23 6.61 15 0.02 48.92 47.25 3.53 16 0.02 49.85 47.38 5.21 17 0.02 50.61 47.50 6.55 18 0.02 51.34 47.61 7.83 19 0.02 51.93 47.69 8.89 20 0.02 52.14 47.73 9.24
下载: 导出CSV
表 6 纤维增强结构对单向弯曲驱动器弯曲程度的影响
Table 6. Influence of fiber-reinforced structure on bending degree of unidirectional bending actuator
P/MPa θ1/(°) θ2/(°) 增大倍数 0.01 6.93 24.14 3.48 0.02 9.27 47.11 5.08 0.03 12.35 69.29 5.61 0.04 14.40 89.89 6.24 0.05 16.12 107.89 6.69
下载: 导出CSV
表 7 纤维增强结构对单向弯曲驱动器末端接触力的影响
Table 7. Influence of fiber-reinforced structure on end contact force of unidirectional bending actuator
P/MPa F1/N F2/N 增大倍数 0.01 0.062 3 0.131 3 2.11 0.02 0.213 3 0.488 0 2.29 0.03 0.466 7 0.875 1 1.88 0.04 0.679 0 1.382 8 2.04 0.05 0.891 4 2.138 4 2.40
下载: 导出CSV
-
[1] 李铁风, 李国瑞, 梁艺鸣, 等.软体机器人结构机理与驱动材料研究综述[J].力学学报, 2016, 242(4):756-766. http://d.old.wanfangdata.com.cn/Periodical/lxxb201604003LI T F, LI G R, LIANG Y M, et al.Study on structural mechanism and driving material of soft robot[J].Chinese Journal of Theoretical Applied Mechanics, 2016, 242(4):756-766(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/lxxb201604003 [2] MAO S X, DONG E, JIN H.Gait study and pattern generation of a starfish-like soft robot with flexible rays actuated by SMAS[J].Journal of Bionic Engineering, 2014, 11(3):400-411. doi: 10.1016/S1672-6529(14)60053-6 [3] TOLLEY M, SHEPHERD R, MOSADEGH B, et al.A resilient untethered soft robot[J].Soft Robotics, 2014, 1(3):213-223. doi: 10.1089/soro.2014.0008 [4] 孙沂琳, 张秋菊, 陈宵燕.软体驱动器研究综述[J].机械设计, 2019, 36(2):5-18. http://d.old.wanfangdata.com.cn/Periodical/njydxyxb201804011SUN Y L, ZHANG Q J, CHEN X Y.Overview of soft-bodied actuators[J].Journal of Mechanical Design, 2019, 36(2):5-18(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/njydxyxb201804011 [5] 姚建涛, 陈新博, 陈俊涛, 等.轮足式仿生软体机器人设计与运动分析[J].机械工程学报, 2019, 55(5):27-35. http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201905004YAO J T, CHEN X B, CHEN J T, et al.Design and motion analysis of a wheel-foot bionic software robot[J].Journal of Mechanical Engineering, 2019, 55(5):27-35(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201905004 [6] 樊继壮, 于庆国, 袁博文, 等.软体仿蛙游动机器人关节式气动致动器研制[J].机器人, 2018, 40(5):578-586. http://d.old.wanfangdata.com.cn/Periodical/jqr201805002FAN J Z, YU Q G, YUAN B W, et al.Development of a joint-like pneumatic actuator applied to soft frog-inspired swimming robot[J].Robot, 2018, 40(5):578-586(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jqr201805002 [7] 胡兵兵, 金国庆.一种仿虎甲幼虫的多驱动器软体机器人的设计与制造[J].机器人, 2018, 40(5):626-633. http://d.old.wanfangdata.com.cn/Periodical/jqr201805007HU B B, JIN G Q.Design and fabrication of a multi-actuator soft robot inspired by young tiger beetle[J].Robot, 2018, 40(5):626-633(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jqr201805007 [8] 董红兵.一种充气式软体全向弯曲模块关键技术研究[D].哈尔滨: 哈尔滨工业大学, 2016. http://cdmd.cnki.com.cn/Article/CDMD-10213-1016774803.htmDONG H B.Research on key technologies of a pneumatic soft omnidirectional bending module[D]. Harbin: Harbin Institute of Technology, 2016(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10213-1016774803.htm [9] YAP H, KAMALDIN N, LIM J, et al.A magnetic resonance compatible soft wearable robotic glove for hand rehabilitation and brain imaging[J].IEEE Transactions on Neural Systems & Rehabilitation Engineering, 2017, 6(25):782-793. http://cn.bing.com/academic/profile?id=5303fab077b36993cb809b90a9a9331f&encoded=0&v=paper_preview&mkt=zh-cn [10] NORITSUGU T, KUBOTA M, YOSHIMATSU S.Development of pneumatic rotary soft actuator made of silicon rubber[J].Journal of Robotics and Mechatronics, 2001, 13(1):17-22. doi: 10.20965/jrm.2001.p0017 [11] 徐淼鑫.气压驱动软体夹持装置研究[D].南京: 南京理工大学, 2015. http://cdmd.cnki.com.cn/Article/CDMD-10288-1015365968.htmXU M X.Research on pneumatic driving software clamping device[D].Nanjing: Nanjing University of Science and Technology, 2015(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10288-1015365968.htm [12] 费燕琼, 庞武, 于文博.气压驱动软体机器人运动研究[J].机械工程学报, 2017, 53(13):14-18. http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201713002FEI Y Q, PANG W, YU W B.Study on motion of air-driven soft robot[J].Journal of Mechanical Engineering, 2017, 53(13):14-18(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201713002 [13] CONNOLLY F, WALSH C J, BERTOLDI K.Automatic design of fiber-reinforced soft actuators for trajectory matching[J].Proceedings of the National Academy of Sciences of the United States of America, 2017, 114(1):51-56. doi: 10.1073/pnas.1615140114 [14] 张忠强, 邹娇, 丁建宁, 等.软体机器人驱动研究现状[J].机器人, 2018, 40(5):648-659. http://d.old.wanfangdata.com.cn/Periodical/jqr201805010ZHANG Z Q, ZOU J, DING J N, et al.Research status of the soft robot driving[J].Robot, 2018, 40(5):648-659(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jqr201805010 [15] PEDRO P, ANANDA C, RAFAEL P B, et al.Closed structure soft robotic gripper[C]//IEEE International Conference on Soft Robotics.Piscataway, NJ: IEEE Press, 2018: 66-70. [16] LASCHI C, CIANCHETTI M, MAZZOLAI B, et al.Soft robot arm inspired by the octopus[J].Advanced Robotics, 2012, 26(7):709-727. doi: 10.1163/156855312X626343 [17] 郭钟华, 李小宁, 林浩鹏.基于主动包络和负压塑形的软体适形夹持器[J].机械工程学报, 2019, 55(12):215-221. http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201912024GUO Z H, LI X N, LIN H P.Soft conformal gripper based on active envelope and negative pressure shaping[J].Journal of Mechanical Engineering, 2019, 55(12):215-221(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201912024 [18] 魏树军, 王天宇, 谷国迎.基于纤维增强型驱动器的气动软体抓手设计[J].机械工程学报, 2017, 53(13):29-38. http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201713004WEI S J, WANG T Y, GU G Y.Design of pneumatic soft grips based on fiber reinforced drivers[J].Chinese Journal of Mechanical Engineering, 2017, 53(13):29-38(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201713004 [19] GALLOWAY K C, KAITLYN P B, PHILLIPS B, et al.Soft robotic grippers for biological sampling on deep reefs[J].Soft Robotics, 2016, 3(1):2169-5172. http://cn.bing.com/academic/profile?id=598e5f11ed5f423b37e5fa6797cde771&encoded=0&v=paper_preview&mkt=zh-cn [20] HAO Y F, GONG Z, XIE Z, et al.Universal soft pneumatic robotic gripper with variable effective length[C]//Proceedings of the 35th Chinese Control Conference.Piscataway, NJ: IEEE Press, 2016: 6109-6114. [21] 王宁扬, 孙昊, 姜皓, 等.一种基于蜂巢气动网络的软体夹持器抓取策略研究[J].机器人, 2016, 38(3):371-384. http://d.old.wanfangdata.com.cn/Periodical/jqr201603014WANG N Y, SUN H, JIANG H, et al.On grasp strategy of honeycomb pneuNets soft gripper[J].Robot, 2016, 38(3):371-384(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jqr201603014 [22] YU D, MARTIN S, XU W L.A soft ring-shaped actuator for radial contracting deformation:Design and modeling[J].Soft Robotics, 2019, 6(4):444-454. doi: 10.1089/soro.2018.0064 [23] LI H, YAO J T, ZHOU P C, et al.High-load soft grippers based on bionic winding effects[J].Soft Robotics, 2018, 6(2):276-288. https://www.ncbi.nlm.nih.gov/pubmed/30650016 [24] WU P C, LIN N, LEI T, et al.A new grasping mode based on a sucked-type underactuated hand[J].Chinese Journal of Mechanical Engineering, 2018, 31(6):25-33. http://d.old.wanfangdata.com.cn/Periodical/jxgcxb-e201806002 [25] MANTI M, HASSAN T, PASSETTI G, et al.A bioinspired soft robotic gripper for adaptable and effective grasping[J].Soft Robotics, 2015, 2(3):107-116. http://cn.bing.com/academic/profile?id=6b2b04bf0b9dd81b3b6b8c9d5db2d315&encoded=0&v=paper_preview&mkt=zh-cn [26] BROWN E, RODENBER N, AMEND J, et al.Universal robotic gripper based on the jamming of granular material[J].Proceedings of the National Academy of Sciences of the United States of America, 2010, 107(44):18809-18814. doi: 10.1073/pnas.1003250107 [27] ELSAYED A, VINCENSI A, LEKAKOU C, et al.Finite element analysis mad design optimization of a pneumatically actuating silicone module for robotic surgery applications[J].Soft Robotics, 2014, 1(4):255-262. doi: 10.1089/soro.2014.0016 [28] 董虎, 林苗, 顾苏程, 等.多向气动驱动器软体仿生舌弯曲状态的研究[J].北京航空航天大学学报, 2019, 45(9):1882-1893. doi: 10.13700/j.bh.1001-5965.2018.0788DONG H, LIN M, GU S C, et al.The research on the motion characteristics of soft bionic tongue based on multi-directional pneumatic actuator[J].Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(9):1882-1893(in Chinese). doi: 10.13700/j.bh.1001-5965.2018.0788 [29] WANG Z, POLYGERINOS P, JOHANNES T B, et al.Interaction forces of soft fiber reinforced bending actuators[J].IEEE/ASME Transactions on Mechatronics, 2017, 22(2):717-727. doi: 10.1109/TMECH.2016.2638468 [30] 黄建龙, 解广娟, 刘正伟.基于Mooney-Rivlin模型和Yeoh模型的超弹性橡胶材料有限元分析[J].橡胶工业, 2008, 55(8):467-471. doi: 10.3969/j.issn.1000-890X.2008.08.004HUANG J L, XIE G J, LIU Z W.The finite element analysis of super-elastic rubber material based on Mooney-Rivlin model and Yeoh model[J].China Rubber Industry, 2008, 55(8):467-471(in Chinese). doi: 10.3969/j.issn.1000-890X.2008.08.004 -

 下载:
下载:












 点击查看大图
点击查看大图

计量
- 文章访问数: 962
- HTML全文浏览量: 221
- PDF下载量: 355
- 被引次数: 0
