



-
摘要:
路径规划是实现移动机器人自主导航的关键技术。针对常规路径规划算法求解的路径长度非最短以及在前后两次规划过程中规划路径不连贯的问题,提出一种基于改进遗传算法的帧间关联平稳路径规划方法。首先,结合随机和定向两种搜索方式生成候选路径;然后,在常规遗传操作算子中引入插入算子和删除算子,并将规划路径的连贯性考虑进适应度函数中来计算每条候选路径的适应度值;最后,输出适应度值最高的路径作为当前最优路径。仿真结果表明了所提方法的正确性和可行性。实验结果表明,所提方法与A*算法和常规遗传算法相比,移动机器人行驶路径长度分别减少了3.05%和1.85%;行驶过程中的最大偏航角变化量分别减少了38.02%和32.43%,转角绝对值之和分别减少了23.97%和19.94%,所提方法能规划出更优的路径,并显著提高移动机器人的行驶效率和平稳性。
Abstract:Path planning is the key technology to realize autonomous navigation of mobile robots. For the problem that the path length is not the shortest and the path is not coherent in the two plan cycles with conventional path planning method, a new method for inter-frame correlation smooth path planning based on improved genetic algorithm is proposed. Firstly, the candidate paths were generated by combining random and directional search methods. Then, the insertion operator and deletion operator were added to conventional genetic operators, and the path coherence of two plan cycles was considered in the fitness function to calculate the fitness value of each candidate path. Finally, the path with the highest fitness value was output as the current optimal path. Simulation results show that the proposed method is correct and feasible. Experimental results show that, compared with A* algorithm and conventional genetic algorithm, the path length of mobile robot is reduced by 3.05% and 1.85%, the variation of maximum yaw angle is reduced by 38.02% and 32.43%, and the sum of absolute value of turning angle is reduced by 23.97% and 19.94% respectively during the movement of mobile robot. It shows that the resulting path of this method is more optimal, which observably improves the moving efficiency and stationarity of the mobile robot.
-
Key words:
- path planning /
- genetic algorithm /
- mobile robot /
- inter-frame correlation /
- obstacle avoidance
-

图 10 改进遗传算法和A*算法路径规划结果对比
Figure 10. Path planning results comparison between improved genetic algorithm and A* algorithm

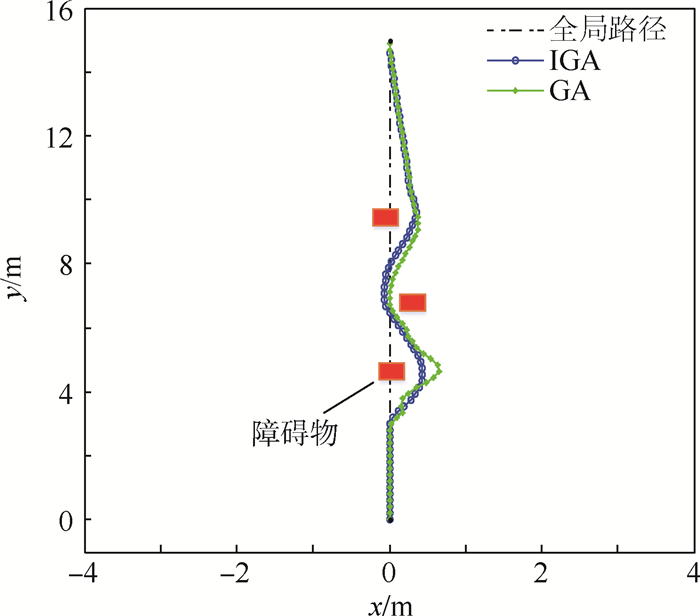
图 11 改进遗传算法和常规遗传算法路径规划结果对比
Figure 11. Path planning results comparison between improved genetic algorithm and conventional genetic algorithm

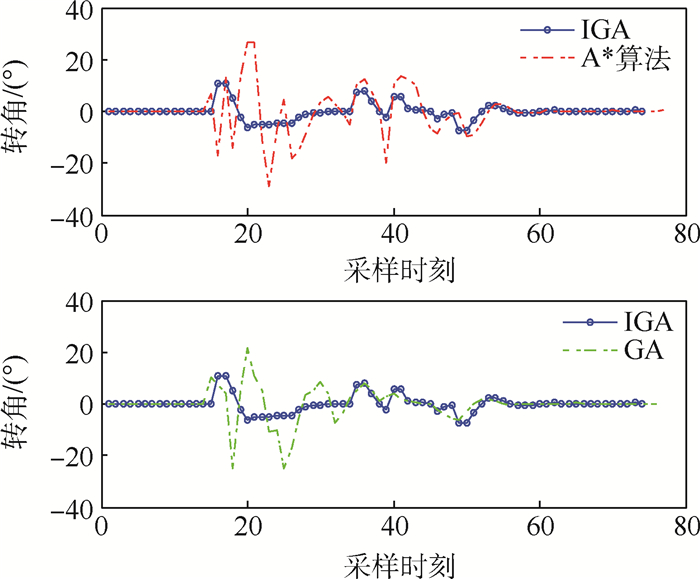
图 13 移动机器人实际行驶过程中转角变化曲线
Figure 13. Curves of turning angle change in actual driving process of mobile robot

图 14 改进遗传算法和A*算法移动机器人行驶轨迹对比
Figure 14. Comparison of mobile robot trajectory between improved genetic algorithm and A* algorithm

图 15 改进遗传算法和常规遗传算法移动机器人行驶轨迹对比
Figure 15. Comparison of mobile robot trajectory between improved genetic algorithm and conventional genetic algorithm
表 1 路径规划仿真结果比较
Table 1. Comparison of path planning simulation results
算法 路径
长度/m最大偏航角
变化量/(°)转角绝对值
之和/(°)A* 15.4 28.8 385.0 GA 15.2 25.0 250.8 IGA 15.2 10.9 135.8  下载: 导出CSV
下载: 导出CSV
表 2 路径规划实验结果比较
Table 2. Comparison of path planning experiment results
算法 路径
长度/m最大偏航角
变化量/(°)转角绝对值
之和/(°)A* 16.4 12.1 206.5 GA 16.2 11.1 196.1 IGA 15.9 7.5 157.0
下载: 导出CSV
-
[1] MAC T T, COPOT C, TRAN D T, et al.Heuristic approaches in robot path planning:A survey[J].Robotics and Autonomous Systems, 2016, 86:13-28. https://www.sciencedirect.com/science/article/pii/S0921889015300671 [2] 赵晓, 王铮, 黄程侃, 等.基于改进A*算法的移动机器人路径规划[J].机器人, 2018, 40(6):137-144. http://d.old.wanfangdata.com.cn/Periodical/dianzixb201105043ZHAO X, WANG Z, HUANG C K, et al.Mobile robot path planning based on improved A* algorithm[J].Robot, 2018, 40(6):137-144(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/dianzixb201105043 [3] 周慧子, 胡学敏, 陈龙, 等.面向自动驾驶的动态路径规划避障算法[J].计算机应用, 2017, 37(3):883-888. http://d.old.wanfangdata.com.cn/Periodical/jsjyy201703049ZHOU H Z, HU X M, CEHN L, et al.Dynamic path planning obstacle avoidance algorithm for autonomous driving[J].Computer Application, 2017, 37(3):883-888(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jsjyy201703049 [4] PADEN B, CAP M, YONG S Z, et al.A survey of motion planning and control techniques for self-driving urban vehicles[J].IEEE Transactions on Intelligent Vehicles, 2016, 1(1):33-55. http://cn.bing.com/academic/profile?id=c0bf0b899f4f5a9b0e860a01a2fc3ce2&encoded=0&v=paper_preview&mkt=zh-cn [5] ALIA C, GILLES T, REINE T, et al.Local trajectory planning and tracking of autonomous vehicles, using clothoid tentacles method[C]//IEEE Symposium on Intelligent Vehicles.Piscataway, NJ: IEEE Press, 2015: 674-679. [6] CHU K, LEE M, SUNWOO M.Local path planning for off-road autonomous driving with avoidance of static obstacles[J].IEEE Transactions on Intelligent Transportation Systems, 2012, 13(4):1599-1616. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=e9bf32af8035d38a1cee3d6ad1c2632c [7] 王景存, 张晓彤, 陈彬, 等.一种基于Dijkstra算法的启发式最优路径搜索算法[J].北京科技大学学报, 2007, 29(3):346-350. http://d.old.wanfangdata.com.cn/Periodical/bjkjdxxb200703022WANG J C, ZHANG X T, CHEN B, et al.Heuristic optimization path-finding algorithm based on Dijkstra algorithm[J].Journal of University of Science and Technology Beijing, 2007, 29(3):346-350(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/bjkjdxxb200703022 [8] WANG Q, HUANG W H, LIU B, et al.An improved A* algorithm for path-planning of two-wheeled self-balancing vehicle[C]//IEEE Conference on Industrial Electronics and Applications(ICIEA).Piscataway, NJ: IEEE Press, 2018: 841-846. [9] 辛煜, 梁华为, 杜明博, 等.一种可搜索无限个邻域的改A*算法[J].机器人, 2014, 36(5):627-633. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jqr201405015XIN Y, LIANG H W, DU M B, et al.An improved A* algorithm for searching infinite neighborhood[J] Robot, 2014, 36(5):627-633(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jqr201405015 [10] XU W D, WEI J Q, DOLAN J M, et al.A real-time motion planner with trajectory optimization for autonomous vehicles[C]//IEEE International Conference on Robotics and Automation.Piscataway, NJ: IEEE Press, 2012: 2061-2067. [11] GU T Y, SNIDER J, DOLAN J M, et al.Focused trajectory planning for autonomous on-road driving[C]//IEEE Symposium on Intelligent Vehicle.Piscataway, NJ: IEEE Press, 2013: 547-552. [12] LI X H, SUN Z P, LIU D X, et al.Combining local trajectory planning and tracking control for autonomous ground vehicles navigating along a reference path[C]//IEEE International Conference on Intelligent Transportation Systems.Piscataway, NJ: IEEE Press, 2014: 725-731. [13] WU M H, CHEN E K, SHI Q Q, et al.Path planning of mobile robot based on improved genetic algorithm[C]//2017 Chinese Automation Congress(CAC).Piscataway, NJ: IEEE Press, 2017: 6696-6700. [14] GONG Z H, SHAN Y X, DENG Y Q, et al.Balance mechanism design for the fusion of pure pursuit and PI tracking controller[C]//2018 Chinese Automation Congress (CAC).Piscataway, NJ: IEEE Press, 2018: 3149-3152. [15] LIU R, DUAN J.A path tracking algorithm of intelligent vehicle by preview strategy[C]//Proceedings of the 32nd Chinese Control Conference.Piscataway, NJ: IEEE Press, 2013: 5630-5635. [16] LAMINI C, BENHLIMA S, ELBEKRI A.Genetic algorithm based approach for autonomous mobile robot path planning[J].Procedia Computer Science, 2018, 127:180-189. http://cn.bing.com/academic/profile?id=cd3a606abf82a7e767a43c6eb198e7d2&encoded=0&v=paper_preview&mkt=zh-cn [17] LI Q, ZHANG W, YIN Y X, et al.An improved genetic algorithm of optimum path planning for mobile robots[C]//International Conference on Intelligent Systems Design & Applications.Piscataway, NJ: IEEE Press, 2006: 637-642. [18] SU J, LI J.Path planning for mobile robots based on genetic algorithms[C]//Proceedings of 9th International Conference on Natural Computation.Piscataway, NJ: IEEE Press, 2014: 723-727. -

 下载:
下载:









 点击查看大图
点击查看大图
计量
- 文章访问数: 1821
- HTML全文浏览量: 1298
- PDF下载量: 443
- 被引次数: 0
