



-
摘要:
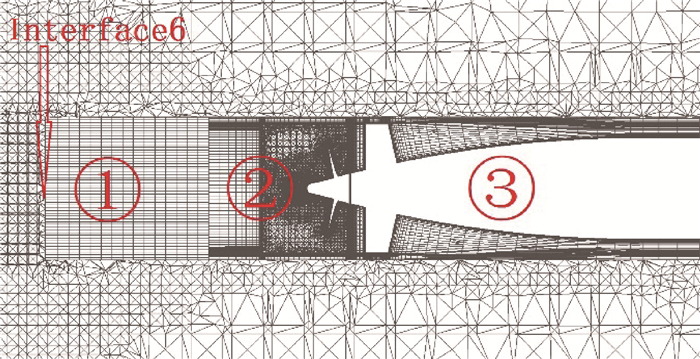
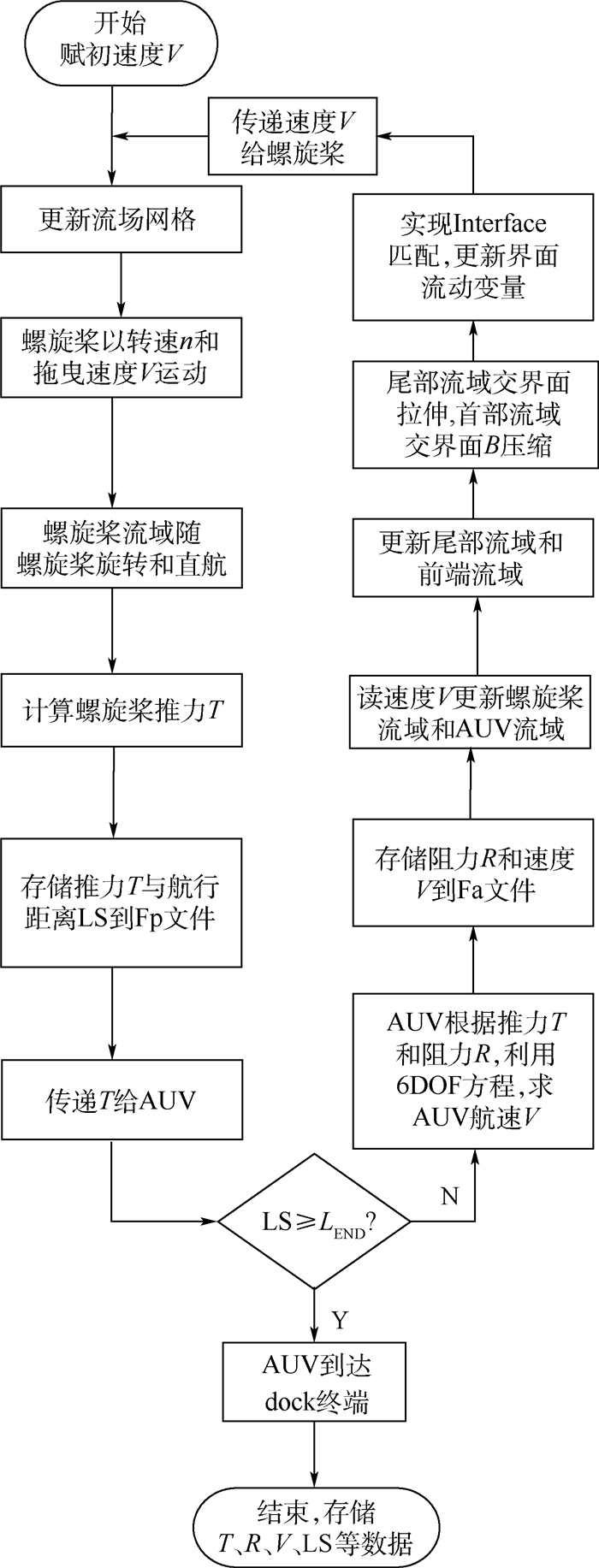
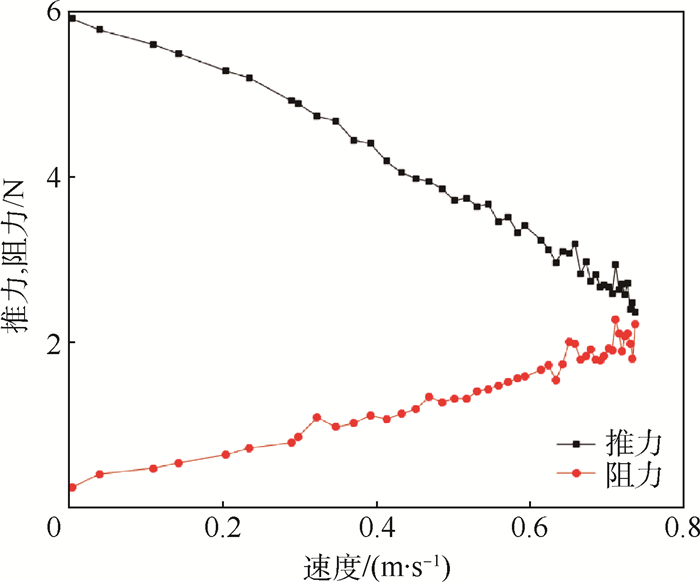
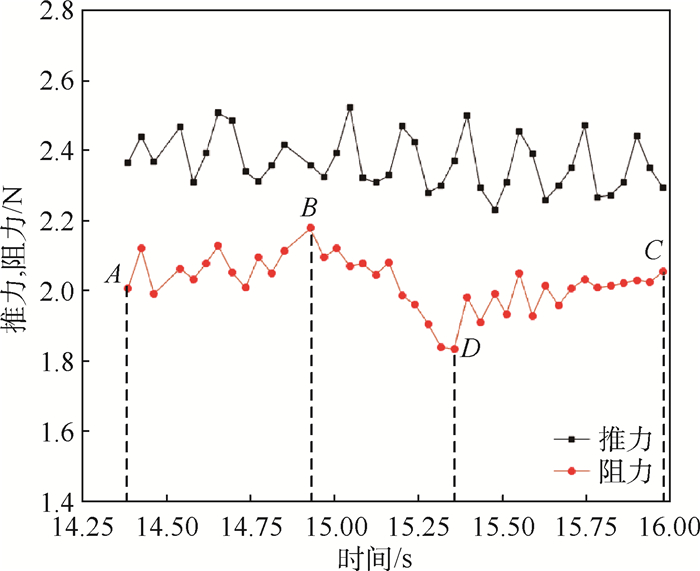
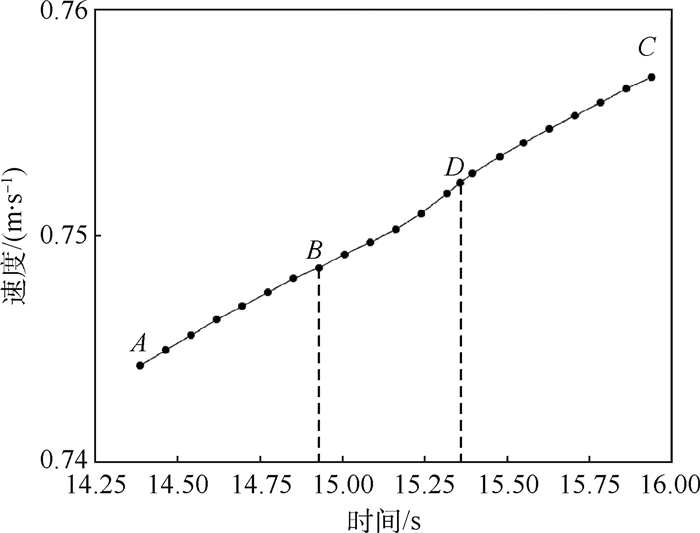
为了预报dock对自主水下机器人(AUV)水动力性能的影响,提高AUV水下对接成功率,提出一种多块混合网格结合动态层方法和用户自定义函数(UDF)的方法,应用于基于离散螺旋桨的AUV自航对接的类物理数值模拟。所提方法采用移动子区域代替传统的移动边界,可提高数值计算效率。在验证了AUV自航试验速度的基础上,对AUV自航对接的水动力和流场进行分析。结果表明,AUV在螺旋桨定转速300 r/min推进作用下,自航对接时间约16 s,终端速度为0.75 m/s。对接速度满足对接碰撞需求。dock对AUV运动影响:在对接井口B点之前起阻碍作用,在B点之后起吸附作用。AUV对接阻力增加2.4%,增幅小,可实现与dock对接。
-
关键词:
- 自主水下机器人(AUV) /
- 水下对接 /
- 类物理数值模拟 /
- 动网格 /
- 自航
Abstract:To predict the effect of dock on hydrodynamic performance of autonomous underwater vehicle (AUV) and to improve AUV underwater docking success rate, a method of multi-block hybrid grids combined with dynamic layer method and user defined function (UDF) was presented, which was applied to the physics-based numerical simulation of AUV underwater docking by self-propulsion with a discretized propeller. In this method, subdomain-moving substitutes for boundary-moving used in traditional dynamic mesh, which could improve the calculation efficiency. After the numerical validation of the velocity history of AUV self-propulsion against the experimental results, the hydrodynamic performance and flow field of AUV underwater docking were investigated. The results demonstrate that the time of AUV underwater docking from rest by a constant rotating propeller of 300 r/min is about 16 s. The end velocity reaches 0.75 m/s, which meets the demand for collision. The effect of the dock on AUV locates on the neck point B. There is a drag on AUV before B, followed by a suction after B. The increment of resistance is small with a value of 2.4%. Therefore, it is achievable for AUV docking with the dock.
-

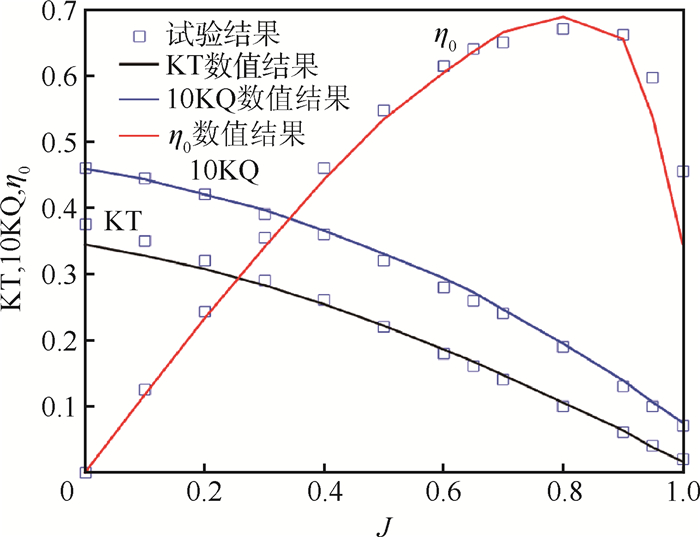
图 6 敞水试验的数值和试验结果对比
Figure 6. Comparison between numerical and experimental results in open water tests

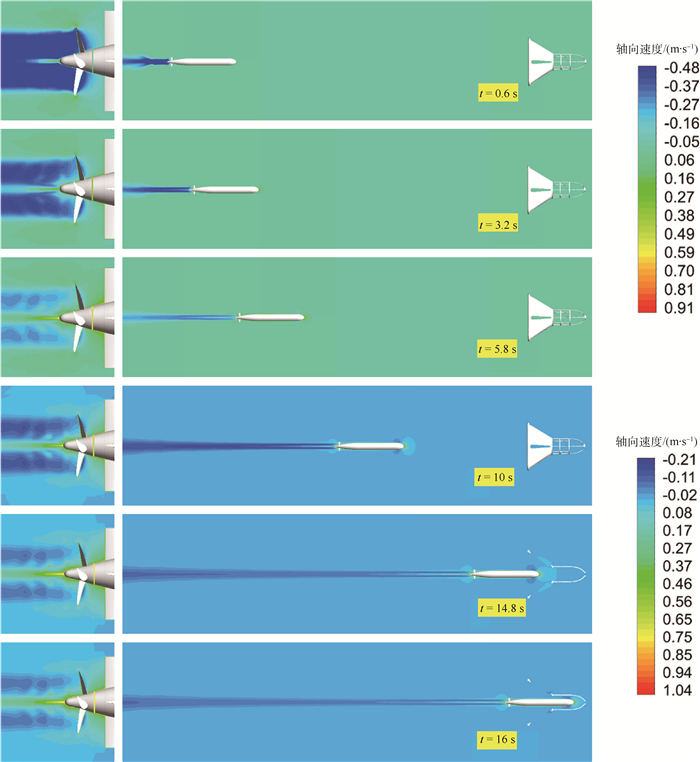
图 12 AUV自航对接轴向速度云图
Figure 12. Axial velocity contours in AUV docking by self-propulsion
-
[1] 燕奎臣, 吴利红.AUV水下对接关键技术研究[J].机器人, 2007, 29(3):267-273. http://d.old.wanfangdata.com.cn/Periodical/jqr200703014YAN K C, WU L H. A survey on the key technologies of AUV underwater docking[J]. Robot, 2007, 29(3):267-273(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jqr200703014 [2] CARRICA P M, CASTRO A M, STERN F.Self-propulsion computations using a speed controller and a discretized propeller with dynamic overset grids[J].Journal of Marine Science and Technology, 2010, 15:316-330. doi: 10.1007-s00773-010-0098-6/ [3] CARRICA P M, FU H P, STERN F.Computations of self-propulsion free to sink and trim and of motions in head waves of the KRISO container ship(KCS)model[J].Applied Ocean Research, 2011, 33(4):309-320. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=2635ab82222bff16e6d9a44e2c1692c7 [4] CARRICA P M, HOSSEINI H S, STERN F.CFD analysis of broaching for a model surface combatant with explicit simulation of moving rudders and rotating propellers[J].Computers & Fluids, 2012, 53:117-132. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=bc107ac901dc60380e0a364634d5486a [5] CHASE N, CARRICA P M.Submarine propeller computations and application to self-propulsion of DARPA SUBOFF[J].Ocean Engineering, 2013, 60:68-80. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=c0df4a1fec04fd105de9d89ae7b97d19 [6] MOFIDI A, CARRICA P M.Simulation of ZigZag maneuvers for a container ship with direct moving rudder and propeller[J].Computers & Fluids, 2014, 96:191-203. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=bc1313a49c35a6a3fda962d4d06a8c51 [7] 沈志荣.船桨舵相互作用的重叠网格技术数值方法研究[D].上海: 上海交通大学, 2014: 150-162.SHEN Z R.Development of overset grid technique for hull-propeller-rudder interactions[D].Shanghai: Shanghai Jiao Tong University, 2014: 150-162(in Chinese). [8] 段旭鹏, 常兴华, 张来平.基于动态混合网格的多体分离数值模拟方法[J].空气动力学学报, 2011, 29(4):447-452. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kqdlxxb201104008DUAN X P, CHANG X H, ZHANG L P.A CFD and 6DOF coupled solver for multiple moving object problems based on dynamic hybrid grids[J].Acta Aerodynamica Sinica, 2011, 29(4):447-452(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kqdlxxb201104008 [9] 张玉东, 纪楚群.包含动边界的非定常流场动网格数值模拟[J].计算物理, 2006, 23(2):166-170. http://d.old.wanfangdata.com.cn/Periodical/jswl200602007ZHANG Y D, JI C Q.Numerical methods with dynamic structured meshes for unsteady flows with moving boundaries[J].Chinese Journal of Computational Physics, 2006, 23(2):166-170(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jswl200602007 [10] 张来平, 邓小刚, 张涵信.动网格生成技术及非定常计算方法进展综述[J].力学进展, 2010, 40(4):424-446. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=lxjz201004004ZHANG L P, DENG X G, ZHANG H X.Reviews of moving grid generation techniques and numerical methods for unsteady flow[J].Advances in Mechanics, 2010, 40(4):424-446(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=lxjz201004004 [11] 吴利红, 封锡盛, 胡志强.三维动态混合网格在AUV发射过程中的应用[J].船舶力学, 2010, 14(7):717-722. http://d.old.wanfangdata.com.cn/Periodical/cblx201007003WU L H, FENG X S, HU Z Q.Application of 3-D hybrid dynamic grids to simulate the flow in AUV swim-out[J].Journal of Ship Mechanics, 2010, 14(7):717-722(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/cblx201007003 [12] WU L H, LI Y P, SU S J, et al.Hydrodynamic analysis of AUV underwater docking with a cone-shaped DOCK under ocean currents[J].Ocean Engineering, 2014, 85:110-126. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=ac0d0573e9989a1c1a280f32eca0621a [13] ZHAN J M, CAI W H, HU W Q, et al.Numerical study on the six-DOF anchoring process of gravity anchor using a new mesh update strategy[J].Marine Structures, 2017, 52:173-187. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=4082b394c8ac8b96da8d5ad7d8e777f7 [14] 郝继光, 姜毅, 韩书永, 等.一种新的动网格更新技术及其应用[J].弹道学报, 2007, 19(2):88-92. http://d.old.wanfangdata.com.cn/Periodical/ddxb200702024HAO J G, JIANG Y, HAN S Y, et al.A new dynamic mesh update method and its applications[J].Journal of Ballistics, 2007, 19(2):88-92(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/ddxb200702024 [15] WU L H, LI Y P, ZHANG H C, et al.Meshing impact on numerical simulation of marine systems performance[C]//Proceedings of Oceans 2016.Piscataway, NJ: IEEE Press, 2016: 1-6. [16] 吴利红, 李一平, 刘开周, 等.基于多块动态混合网格的AUV自航类物理数值模拟[J].机器人, 2019, 41(6):706-712. http://d.old.wanfangdata.com.cn/Periodical/jqr201906002WU L H, LI Y P, LIU K Z, et al.Physics-based numerical simulation of AUV self-propulsion using multi-block hybrid dynamic mesh method[J].Robot, 2019, 41(6):706-712(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jqr201906002 [17] ROBERT S M, BRETT W H, LANCE M, et al.Docking control system for a 54-cm-diameter(21-in)AUV[J].IEEE Journal of Oceanic Engineering, 2008, 33(4):550-562. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=CC029688553 -

 下载:
下载:






 点击查看大图
点击查看大图

计量
- 文章访问数: 653
- HTML全文浏览量: 52
- PDF下载量: 218
- 被引次数: 0
