



-
摘要:
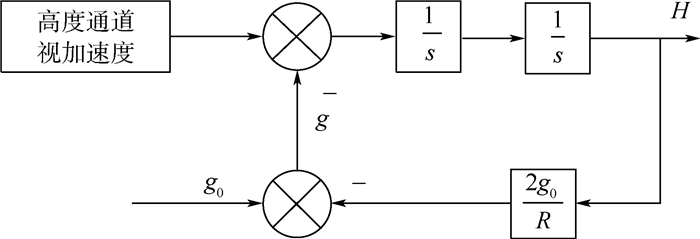
高超声速滑翔飞行器滑翔飞行高度在30 km以上,大气极其稀薄,传统采用气压高度计的地形匹配辅助导航方式将无法正常工作。为实现高精度地形匹配,在分析匹配算法对地形常值误差不敏感的基础上,详细论证了基于惯性系统解算绝对高度方案,并对比分析了将短时滑翔段弹道简化为等高飞行方案。在捷联惯性导航系统(SINS)误差模型基础上,结合高度通道方块图,通过拉普拉斯变换,建立了惯性系统高度通道短时稳定性解析模型,并以CAV-H为研究对象建立数值仿真环境。仿真结果表明,解析模型精度较高,基于SINS解算绝对高度能够满足地形匹配辅助导航系统精度要求,优于气压高度计正常工作时的精度。
Abstract:The height of the hypersonic vehicle gliding flight is over 30 km, so the atmosphere is extremely thin and the traditional terrain match aided navigation with barometric altimeter cannot work properly. In order to improve the accuracy of terrain match, on the basis of analyzing the insensitivity of the matching algorithm to the terrain constant value error, the scheme of using inertial system to solve absolute height is demonstrated in detail, and the scheme that simplifies the short-time gliding trajectory to equal high flight is compared and analyzed. Based on the strap-down inertial navigation system (SINS) error model, the analytic model of the short-time stability of the inertial system is established by the height channel block diagram and Laplace transformation. In addition, the numerical simulation environment is established with CAV-H as study object. The simulation results show that the analytical model has high accuracy and the scheme that the absolute height is solved by SINS can meet the accuracy requirements of terrain match aided navigation system, which is better than the accuracy of the normal operation of the barometric altimeter.
-

图 1 高度h处压强差1Pa对应的高度差
Figure 1. Height difference corresponding to pressure difference of 1Pa at h height

图 2 不同升阻比下δh随时间变化曲线
Figure 2. Variation curves of δh with time under different lift-drag ratios

图 3 不同初始高度下δh随时间变化曲线
Figure 3. Variation curves of δh with time under different initial heights

图 4 较小初始速度偏差下δh随时间变化曲线
Figure 4. Variation curves of δh with time under smaller initial velocity deviation

图 5 较大初始速度偏差下δh随时间变化曲线
Figure 5. Variation curves of δh with time under larger initial velocity deviation
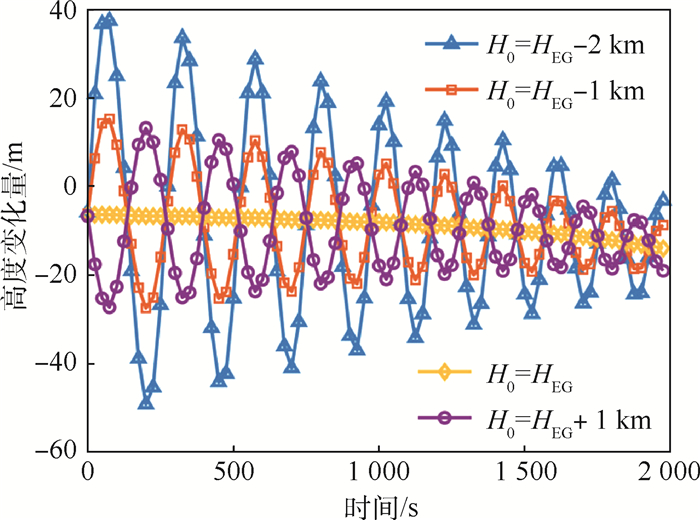
图 6 不同初始高度偏差下δh随时间变化曲线
Figure 6. Variation curves of δh with time under different initial height deviations
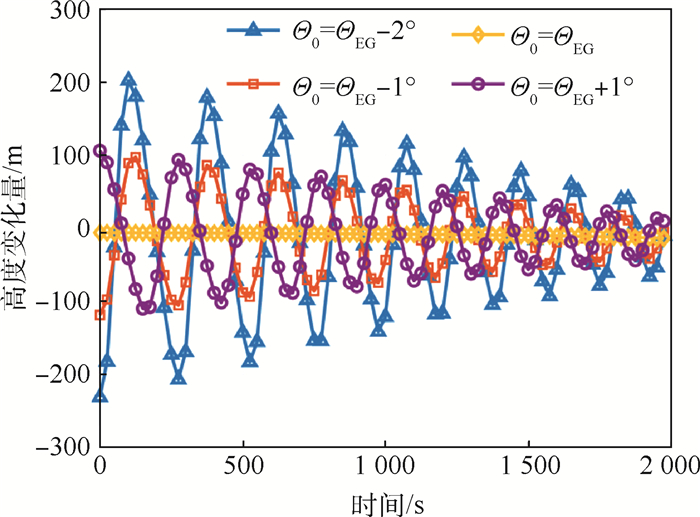
图 7 不同初始速度倾角偏差下δh随时间变化曲线
Figure 7. Variation curves of δh with time under different initial flight path angle deviations

图 10 不同ΔT下δh随时间t0的变化曲线
Figure 10. Variation curves of δh with time t0 under different ΔT
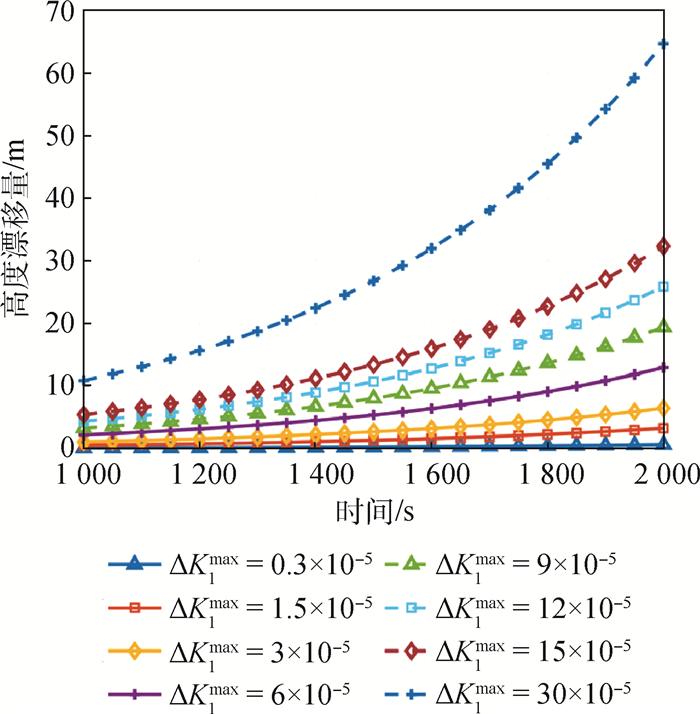
图 11 不同加速度计误差系数偏差下δh随时间t0的变化曲线
Figure 11. Variation curves of δh with time t0 with different deviations of accelerometer error coefficient

图 12 不同ϕ′m0下δh随时间t0的变化曲线
Figure 12. Variation curves of δh with time t0 under different ϕ′m0
表 1 不同升阻比下2000s时的δh
Table 1. δh at 2000s with different lift-drag ratios
K δh/m 2.30 -32.78 2.45 -24.03 2.60 -19.07 2.75 -15.88 2.90 -13.65 3.05 -12.00 3.20 -10.74 3.35 -9.73 3.50 -8.91  下载: 导出CSV
下载: 导出CSV
表 2 不同初始高度下2000s时的δh
Table 2. δh at 2000s with different initial heights
H0/km δh/m 50 -64.64 51 -39.16 52 -27.92 53 -21.63 54 -17.64 55 -14.91 60 -8.72 70 -5.86 80 -5.31
下载: 导出CSV
表 3 ΔT=1s时δh的大小
Table 3. Value of δh when ΔT=1s
t0/s δh/m 1 000 5.10 1 300 8.80 1 500 12.57 1 800 21.36 2 000 30.36
下载: 导出CSV
表 4 不同加速度计误差系数偏差下t0=2000s时δh的大小
Table 4. Value of δh when t0=2000s with different deviations of accelerometer error coefficient
误差系数偏差 δh/m 0.3×10-5 0.65 1.5×10-5 3.23 3×10-5 6.46 6×10-5 12.92 9×10-5 19.38 12×10-5 25.84 15×10-5 32.30 30×10-5 64.60
下载: 导出CSV
表 5 不同ϕ′m0下t0=2000s时δh的大小
Table 5. Value of δh when t0=2000s with different ϕ′m0
ϕ′m0/(°) δh/m 0 16.80 5 17.79 10 18.13 15 18.68 20 19.16 25 19.56 30 19.87 35 20.09 40 20.23 45 20.28
下载: 导出CSV
表 6 工具误差系数精度
Table 6. Instrumental error coefficient accuracy
误差系数偏差 系数精度 ΔD0x/((°)·h-1) 0.01 ΔD0y/((°)·h-1) 0.01 ΔD0z/((°)·h-1) 0.01 ΔK0x/g0 3×10-5 ΔK0y/g0 3×10-5 ΔK0z/g0 3×10-5 ΔK1x 3×10-5 ΔK1y 3×10-5 ΔK1z 3×10-5
下载: 导出CSV
-
[1] 鲜勇, 李邦杰, 雷刚, 等.弹道导弹精度分析方法[M].长沙:国防科技大学出版社, 2012:1.XIAN Y, LI B J, LEI G, et al.Ballistic missile precision analysis method[M].Changsha:National University of Defense Technology Press, 2012:1(in Chinese). [2] 鲜勇, 李刚, 苏娟, 等.导弹制导理论与技术[M].北京:国防工业出版社, 2015:11.XIAN Y, LI G, SU J, et al.Missile guidance theory and technology[M].Beijing:National Defense Industry Press, 2015:11(in Chinese). [3] 李雄伟, 刘建业, 康国华.TERCOM地形高程辅助导航系统发展及应用研究[J].中国惯性技术学报, 2006, 14(1):34-40.LI X W, LIU J Y, KANG G H.Development and application of TERCOM elevation-aided navigation system[J].Journal of Chinese Inertial Technology, 2006, 14(1):34-40(in Chinese). [4] 张聘义, 强涛, 翁晓东.巡航导弹现状与发展趋势[J].红外与激光工程, 2006, 35(z1):28-34.ZHANG P Y, QIANG T, WENG X D.Status quo and trend of cruise missile[J].Infrared and Laser Engineering, 2006, 35(z1):28-34(in Chinese). [5] 戴晨曦, 程向红, 陈红梅, 等.天文观测角辅助的高超声速飞行器传递对准方法[J].中国惯性技术学报, 2015, 23(4):446-450.DAI C X, CHENG X H, CHEN H M, et al.Transfer alignment approach of hypersonic vehicle aided by celestial angle[J].Journal of Chinese Inertial Technology, 2015, 23(4):446-450(in Chinese). [6] 肖存英.临近空间大气动力学特性研究[D].北京: 中国科学院空间科学与应用研究中心, 2009.XIAO C Y.Researches on the dynamics of the atmosphere in the near space[D].Beijing: Center for Space Science and Applied Research, Chinese Academy of Sciences, 2009(in Chinese). [7] 秦永元.惯性导航[M].2版.北京:科学出版社, 2014:190-191.QIN Y Y.Inertial navigation[M].2nd ed.Beijing:Science Press, 2014:190-191(in Chinese). [8] 吴旋.高性能惯性/大气高度组合及其动态虚拟仿真技术[D].南京: 南京航空航天大学, 2014.WU X.High-performance INS/ADS and high dynamic of virtual simulation technology[D].Nanjing: Nanjing University of Aeronautics and Astronautics, 2014(in Chinese). [9] 臧新乐.捷联惯性导航系统误差阻尼技术[D].哈尔滨: 哈尔滨工程大学, 2017.ZANG X L.Error damping technique of strapdown inertial navigation system[D].Harbin: Harbin Engineering University, 2017(in Chinese). [10] 徐剑, 毕笃彦, 袁建国.一种无气压高度信息辅助的地形导航系统[J].电光与控制, 2005, 12(6):46-49.XU J, BI D Y, YUANG J G.A terrain navigation system independent of barometer information[J].Electronics Optics & Control, 2005, 12(6):46-49(in Chinese). [11] 谢愈, 刘鲁华, 汤国建, 等.多约束条件下高超声速滑翔飞行器轨迹优化[J].宇航学报, 2011, 32(12):2499-2504.XIE Y, LIU L H, TANG G J, et al.Trajectory optimization for hypersonic glide vehicle with multi-constraints[J].Journal of Astronautics, 2011, 32(12):2499-2504(in Chinese). [12] 谢愈, 潘亮, 谷学强, 等.高超声速飞行器多目标复杂约束滑翔弹道优化[J].国防科技大学学报, 2017, 39(2):9-17.XIE Y, PAN L, GU X Q, et al.Gliding trajectory optimization with multiple objectives and complicated constraints for hypersonic vehicles[J].Journal of National University of Defense Technology, 2017, 39(2):9-17(in Chinese). [13] 胡锦川, 张晶, 陈万春.高超声速飞行器平稳滑翔弹道解析解及其应用[J].北京航空航天大学学报, 2016, 42(5):961-968. doi: 10.13700/j.bh.1001-5965.2015.0330HU J C, ZHANG J, CHEN W C.Analytical solutions of steady glide trajectory for hypersonic vehicle and planning application[J].Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(5):961-968(in Chinese). doi: 10.13700/j.bh.1001-5965.2015.0330 [14] 李广华, 张洪波, 汤国建.高超声速滑翔飞行器典型弹道特性分析[J].宇航学报, 2015, 36(4):397-403.LI G H, ZHANG H B, TANG G J.Typical trajectory characteristics of hypersonic glide vehicle[J].Journal of Astronautics, 2015, 36(4):397-403(in Chinese). [15] FERREIRA L O.Nonlinear dynamics and stability of hypersonic reentry vehicles[D].Michigan: University of Michigan, 1995. [16] 李邦杰, 王明海.滑翔式远程导弹滑翔段弹道研究[J].宇航学报, 2009, 30(6):2122-2126.LI B J, WANG M H.Research on glide trajectory of long range glide missile[J].Journal of Astronautics, 2009, 30(6):2122-2126(in Chinese). [17] 黄帅.低成本微小型巡飞弹组合导航技术研究[D].长沙: 国防科学技术大学, 2016.HUANG S.Research on integrated navigation technology for low-cost miniature loitering missile[D].Changsha: National University of Defense Technology, 2016(in Chinese). [18] 孙健.GPS和高精度气压高度表的组合导航定位技术研究[D].南京: 南京航空航天大学, 2008.SUN J.Research on GPS and high precision baro-altimeter integrated navigation and positioning technology[D].Nanjing: Nanjing University of Aeronautics and Astronautics, 2008(in Chinese). [19] 白浪, 雷旭升, 盛蔚, 等.基于小波滤波的无人旋翼机高度信息融合[J].北京航空航天大学学报, 2012, 38(5):659-664. https://bhxb.buaa.edu.cn/CN/Y2012/V38/I5/659BAI L, LEI X S, SHENG W, et al.Method of small unmanned aerial rotorcraft altitude information fusion based on wavelet filter[J].Journal of Beijing University of Aeronautics and Astronautics, 2012, 38(5):659-664(in Chinese). https://bhxb.buaa.edu.cn/CN/Y2012/V38/I5/659 [20] 李本亮.基于CAN总线的气压高度表研制[D].西安: 西安电子科技大学, 2015.LI B L.Design of atmospheric pressure altimeter based on CAN bus[D].Xi'an: Xidian University, 2015(in Chinese). [21] Bosch Sensortec. BMP180 digital pressure sensor data sheet: BST-BMP-180-DS000-12[R].[S.l.]: Bosch Sensortec, 2015. [22] Bosch Sensortec.BMP388 digital pressure sensor data sheet: BST-BMP-388-DS001-01[R].[S.l.]: Bosch Sensortec, 2018. [23] 张二国, 鲁物婷, 李伟, 等.PTB210气压传感器检定结果的不确定度分析[J].陕西气象, 2015(1):39-40.ZHANG E G, LU W T, LI W, et al.Uncertainty analysis of the detection results of PTB210 altimeter sensor[J].Journal of Shaanxi Meteorology, 2015(1):39-40(in Chinese). [24] MASSÉ F, BOURKE A K, CHARDONNENS J, et al.Suitability of commercial barometric pressure sensors to distinguish sitting and standing activities for wearable monitoring[J].Medical Engineering & Physics, 2014, 36(6):739-744. [25] 郝振海, 黄圣国.高精度气压高度表的研制[J].南京航空航天大学学报, 2009, 41(1):134-138.HAO Z H, HUANG S G.Development of high precision barometric altimeter[J].Journal of Nanjing University of Aeronautics & Astronautics, 2009, 41(1):134-138(in Chinese). [26] 杨晓斌.用于飞行器导航的地形匹配方法研究[D].上海: 同济大学, 2004.YANG X B.The study of the terrain-matching method based on aircraft navigation[D].Shanghai: Tongji University, 2004(in Chinese). [27] 鲜勇, 李刚.弹道导弹捷联惯性导航系统误差传播模型[J].兵工学报, 2009, 30(3):338-341.XIAN Y, LI G.Rsearch on SINS error transfer model of ballistic missile[J].Acta Armamentarii, 2009, 30(3):338-341(in Chinese). [28] 张毅, 肖龙旭, 王顺宏.弹道导弹弹道学[M].长沙:国防科技大学出版社, 1999:29.ZHANG Y, XIAO L X, WANG S H.Missile ballistics[M].Changsha:National University of Defense Technology Press, 1999:29(in Chinese) [29] 周邦大.基于SINS/BDS/CNS的高超声速飞行器组合导航研究[D].长沙: 国防科学技术大学, 2010.ZHOU B D.Research on integrated navigation technology for hypersonic vehicle[D].Changsha: National University of Defense Technology, 2010(in Chinese). [30] PHILLIPS T H.A common aero vehicle (CAV) model, description, and employment guide[R].Arlington: Schafer Cooperation for AFRL and AFSPC, 2003. [31] 范娜.地形辅助导航系统的匹配算法研究[D].哈尔滨: 哈尔滨工程大学, 2007.FAN N.Research on matching algorithm of terrain aided navigation system[D].Harbin: Harbin Engineering University, 2007(in Chinese). -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 1069
- HTML全文浏览量: 260
- PDF下载量: 161
- 被引次数: 0
