



Method and experimental verification of dynamic accuracy detection of single-frequency RTK
-
摘要:
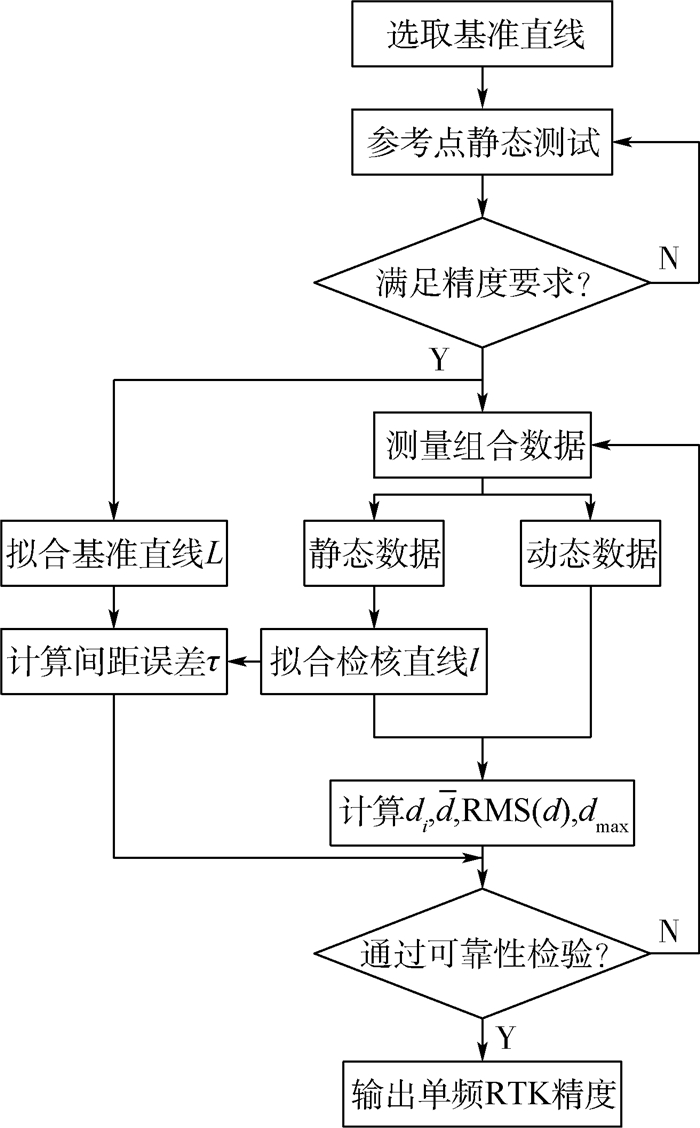
单频RTK技术在高精度测绘、无人驾驶等领域有着广泛应用,针对单频RTK的动态定位精度量化问题,提出了一种易于操作、适用地域广、不需要额外辅助设备的单频RTK动态精度检测法。首先,在地面建立基准直线; 然后,沿基准直线以走停模式测量RTK静态、动态组合数据,将静态数据利用整体最小二乘法拟合得到检核直线,并以此为参考评定动态定位精度; 最后,进行可靠性检验。精度评定时,以动态点到检核直线的平均偏离作为动态精度指标,采用间距误差作为检验所提方法可靠性的指标。实验结果表明,所提方法具有较高的可靠性,可以准确量化单频RTK约2~5 cm的动态定位精度。
Abstract:Single-frequency RTK technology is widely used in high-accuracy mapping, unmanned driving and other fields. A single-frequency RTK dynamic accuracy detection method is proposed to accurately quantify the dynamic positioning accuracy. It is easy to operate, suitable for a wide area and does not need additional auxiliary equipment. Using this method, we first establishes some reference lines on the ground, then measures RTK static and dynamic combined data along the reference lines in the run-stop mode. The static data are fitted by the total least squares algorithm to get the called checking lines, which are then used as the references for evaluating the dynamic positioning accuracy. The reliability of the proposed method is also checked using the same sets of the test data. During accuracy assessment, the average deviation from the dynamic point to the checking lines is used as the dynamic accuracy index, and the reliability index of the method is characterized by the difference between the distances of two reference lines and those of two checking lines. The experimental results show that the proposed method has high reliability and can accurately quantify the dynamic positioning accuracy of single-frequency RTK of about 2-5 cm.
-
Key words:
- satellite navigation /
- single-frequency RTK /
- positioning accuracy /
- low cost /
- accuracy analysis
-

图 1 RTK单频双差观测原理示意图
Figure 1. Schematic diagram of RTK single-frequency double-difference observation principle

图 2 单频RTK动态精度检测法流程
Figure 2. Flowchart of single-frequency RTK dynamic accuracy detection method

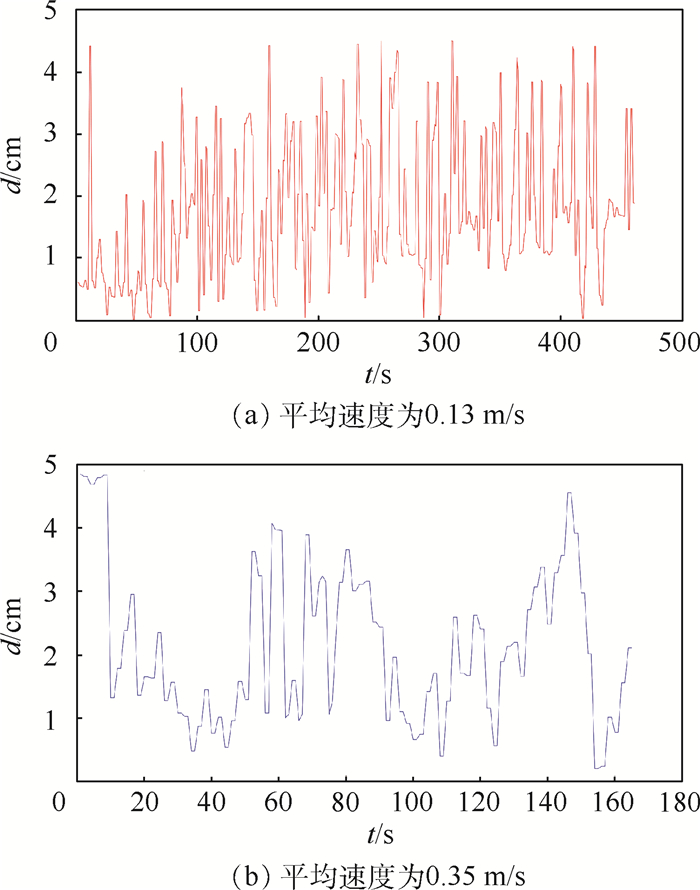
图 7 平均速度为0.35 m/s时实验的动态点与检核直线
Figure 7. Dynamic point and checking line of experiment with average speed of 0.35 m/s
表 1 东北天方向的RMS最值
Table 1. Maximum and minimum RMS in E-N-U
方向 RMSmax/cm RMSmin/cm E 0.72 0.19 N 0.75 0.19 U 1.90 0.33  下载: 导出CSV
下载: 导出CSV
表 2 动态实时定位实验精度分析
Table 2. Accuracy analysis of dynamic real-time positioning experiment
实验次数 平均速度/(m·s-1) 平均偏离
d/cm最大偏离
dmax/cm误差离散程度
RMS(d)/cm1 0.13 1.676 4 4.567 6 1.18 2 0.35 2.151 7 4.855 4 2.29
下载: 导出CSV
-
[1] THEVENON P, VEZINET J, ESTRADE P.Estimation of the base station position error in a RTK receiver using state augmentation in a Kalman filter[C]//20189th ESA Workshop on Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing (NAVITEC).Piscataway: IEEE Press, 2018: 1-7. [2] HENKEL P, SPERL A.Real-time kinematic positioning for unmanned air vehicles[C]//2016 IEEE Aerospace Conference.Piscataway: IEEE Press, 2016: 1-7. [3] 张小红, 李星星, 郭斐, 等.GPS单频精密单点定位软件实现与精度分析[J].武汉大学学报(信息科学版), 2008, 33(8):783-787. http://d.old.wanfangdata.com.cn/Periodical/whchkjdxxb200808004ZHANG X H, LI X X, GUO F, et al.Realization and precision analysis of single-frequency precise point positioning software[J].Geomatics and Information Science of Wuhan University, 2008, 33(8):783-787(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/whchkjdxxb200808004 [4] 苏景岚, 章红平.城市环境下BDS/GPS单频RTK定位算法研究[J].大地测量与地球动力学, 2018, 38(10):1033-1037. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=dkxbydz201810008SU J L, ZHANG H P.Performance analysis of RTK algorithm for single-frequency combination of GPS and BDS in urban environments[J].Journal of Geodesyand Geodesy and Geodynamics, 2018, 38(10):1033-1037(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=dkxbydz201810008 [5] 潘冉冉, 蒋浩, 张洪, 等.低成本实时动态载波相位差分GPS的定位精度研究[J].浙江大学学报(农业与生命科学版), 2018, 44(4):414-422. http://d.old.wanfangdata.com.cn/Periodical/zjdxxb-nyysm201804009PAN R R, JIANG H, ZHANG H, et al.Research on positioning accuracy of low cost real time kinematic-global positioning system (RTKGPS)[J].Journal of Zhejiang University (Agriculture and Life Sciences), 2018, 44(4):414-422(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/zjdxxb-nyysm201804009 [6] 徐彦田, 程鹏飞, 蔡艳辉, 等.单频RTK动态解算的卡尔曼滤波算法研究[J].测绘科学, 2012, 37(4):43-44. http://d.old.wanfangdata.com.cn/Periodical/chkx201204013XU Y T, CHENG P F, CAI Y H, et al.A Kalman filter algorithm for single-frequency RTK solution[J].Science of Surveying and Mapping, 2012, 37(4):43-44(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/chkx201204013 [7] ODOLINSKI R, TEUNISSEN P J G.Single-frequency, dual-GNSS versus dual-frequency, single-GNSS:A low-cost and high-grade receivers GPS-BDS RTK analysis[J].Journal of Geodesy, 2016, 90(11):1255-1278. doi: 10.1007/s00190-016-0921-x [8] 李金龙.北斗/GPS多频实时精密定位理论与算法[D].郑州: 解放军信息工程大学, 2014.LI J L.BDS/GPS multi-frequency real-time kinematic positioning theory and algorithms[D].Zhengzhou: PLA Information Engineering University, 2014(in Chinese). [9] HENKEL P, BANJARA B.Precise positioning in alpine areas with troposphere and multipath estimation[J].IEEE Sensors Journal, 2018, 18(20):8397-8409. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=6b6fb18737be75b8872473713253c40e [10] 谢钢.GPS原理与接收机设计[M].北京:电子工业出版社, 2017.XIE G.Principles of GPS and receiver design[M].Beijing:Publishing House of Electronics Industry, 2017(in Chinese). [11] 陈健, 岳东杰, 朱少林.BDS/GPS组合单历元相对定位性能分析[J].现代测绘, 2017, 40(4):15-20. doi: 10.3969/j.issn.1672-4097.2017.04.005CHEN J, YUE D J, ZHU S L.Performance assessment of BDS/GPS single-epoch positioning[J].Modern Surveying and Mapping, 2017, 40(4):15-20(in Chinese). doi: 10.3969/j.issn.1672-4097.2017.04.005 [12] ZHANG S G, CHENG N P, NI S Y.Analysis and simulations of LAMBDA integer ambiguity resolution algorithm[C]//2018 3rd International Conference on Control, Automation and Artificial Intelligence(CAAI 2018), 2018: 131-133. [13] 姚宜斌, 黄书华, 孔建, 等.空间直线拟合的整体最小二乘算法[J].武汉大学学报(信息科学版), 2014, 39(5):571-574. http://d.old.wanfangdata.com.cn/Periodical/whchkjdxxb201405013YAO Y B, HUANG S H, KONG J, et al.Total least squares algorithm for fitting spatial straight lines[J].Geomatics and Information Science of Wuhan University, 2014, 39(5):571-574(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/whchkjdxxb201405013 [14] 杜聪慧, 高星伟, 马元, 等.BDS/GPS双系统单频RTK定位性能分析[C]//第九届中国卫星导航学术年会, 2018: 76-81.DU C H, GAO X W, MA Y, et al.Performance analysis of RTK positioning for single-frequency combination of BDS and GPS[C]//The 9th China Satellite Navigation Conference, 2018: 76-81(in Chinese). [15] 张艳红, 张鹏, 吴辉, 等.基于RTK的低成本GPS+BDS接收机设计与性能分析[J].测绘通报, 2018(11):1-6. http://d.old.wanfangdata.com.cn/Periodical/chtb201811001ZHANG Y H, ZHANG P, WU H, et al.Design and performance analysis of low cost GPS+BDS receiver based on RTK[J].Bulletin of Surveying and Mapping, 2018(11):1-6(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/chtb201811001 [16] CHAI T, DRAXLER R R.Root mean square error (RMSE) or mean absolute error(MAE) —Arguments against avoiding RMSE in the literature[J].Geoscientific Model Development, 2014, 7(3):1247-1250. doi: 10.5194/gmd-7-1247-2014 -

 下载:
下载:




 点击查看大图
点击查看大图

计量
- 文章访问数: 919
- HTML全文浏览量: 178
- PDF下载量: 269
- 被引次数: 0
