



Intelligent detection and autonomous capture system of seafood based on underwater robot
-
摘要:
针对水下机器人实现自主抓取过程中缺乏引导系统的问题,提出了一种依托水下机器人的海产品智能检测与自主抓取系统,用来解决水下目标的智能检测问题,并引导水下机器人进行海产品的自主抓取。将卷积神经网络检测算法应用到水下场景,利用水下图像数据集训练特定的网络模型DSOD检测海产品。建立短基线定位系统定位水下作业的机器人。通过分析相机成像坐标系与定位系统坐标系之间的关系,提出了一种计算海产品实际位置的坐标转换方法,计算海产品的实际位置。设计了一种基于反馈机制的多信号分析方法,引导机器人在水下移动并抓捕海产品。为了验证所提系统的有效性,搭建了一款水下抓捕机器人,并成功将所提算法应用到机器人,在真实海洋环境中进行海产品的自主抓取实验。
Abstract:Currently, underwater robot faces the tough challenges of lacking intelligent detection and autonomous capture system to guide. Therefore, autonomous capture is hard to be achieved. Toward this end, this paper proposes an intelligent detection and autonomous capture system to achieve intelligent detection of marine target and guide the underwater robot to autonomously capture seafood. First, we employ convolutional neural network to perform object detection task in underwater scene and train the DSOD with underwater dataset to accurately detect marine objects. What's more, the short baseline positioning system is built to locate the underwater robot. To calculate the position of the object relative to robot, this paper proposes a coordinate transforming method to transform the target's location from camera coordinates system to underwater positioning coordinates. Furthermore, this paper designs a multi-signal analysis method based on feedback mechanism to command the robot to move ahead to the seafood until grasping them. To verify the effectiveness of the system, we develop an underwater picking robot and successfully apply the proposed methods to the robot to autonomously detect and capture the marine object.
-
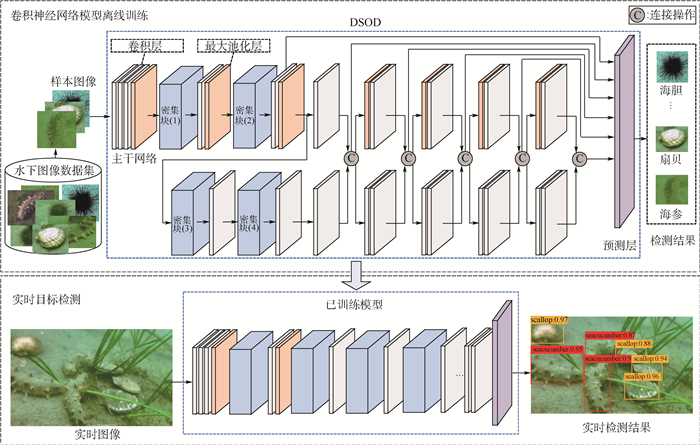
图 1 卷积神经网络模型的训练和水下目标实时检测
Figure 1. CNN model training and real-time marine object detection

图 3 机器人与目标在定位系统中的位置关系
Figure 3. Relative location of robot and target in positioning system
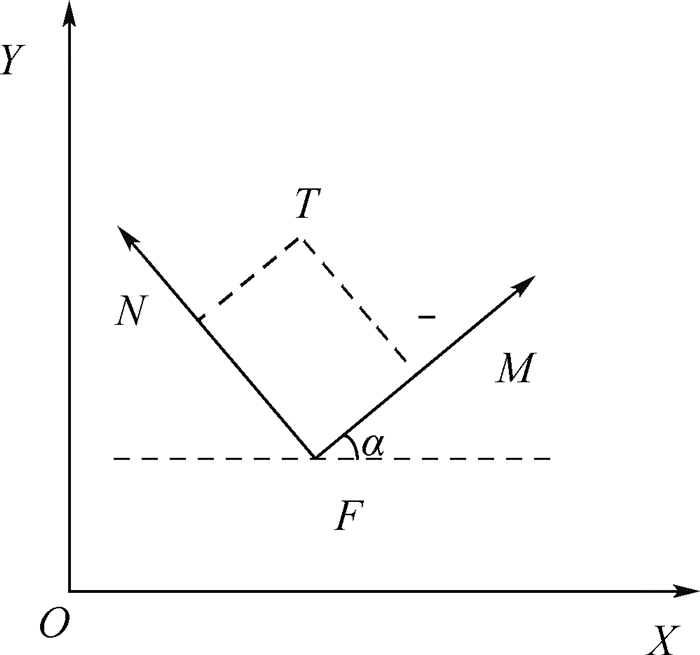
图 4 机器人世界坐标系和定位系统坐标系的关系
Figure 4. Relation between robot world coordinate system and positioning system coordinate system
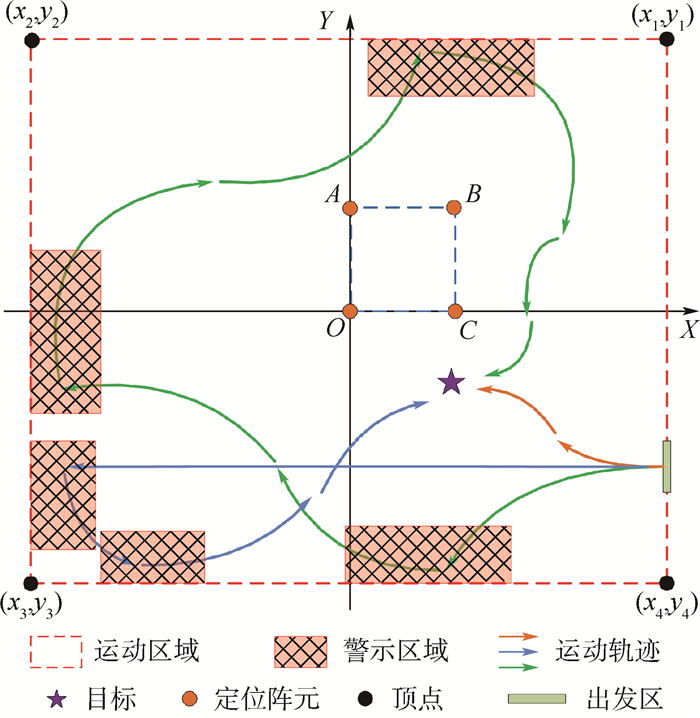
图 5 水下机器人在限制区域内的运动轨迹
Figure 5. Trajectory of underwater robot moving within constrained area

图 8 检测模块和机器人之间的通信协议
Figure 8. Communication protocol between detection module and robot
-
[1] SHEN Z, LIU Z, LI J, et al.DSOD: Learning deeply supervised object detectors from scratch[C]//IEEE International Conference on Computer Vision(ICCV).Piscataway, NJ: IEEE Press, 2017: 1937-1945. [2] VICKERY K.Acoustic positioning systems.A practical overview of current systems[C]//Proceedings of the 1998 Workshop on Autonomous Underwater Vehicles.Piscataway, NJ: IEEE Press, 1998: 5-17. [3] GIRSHICK R, DONAHUE J, DARRELL T, et al.Rich feature hierarchies for accurate object detection and semantic segmentation[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition.Piscataway, NJ: IEEE Press, 2014: 580-587. [4] GIRSHICK R.Fast R-CNN[C]//Proceedings of the IEEE International Conference on Computer Vision.Piscataway, NJ: IEEE Press, 2015: 1440-1448. [5] REN S, HE K, GIRSHICK R, et al.Faster R-CNN: Towards real-time object detection with region proposal networks[C]//Proceedings of the 29th International Conference on Neural Information Processing Systems.Cambridge: MIT Press, 2015: 91-99. [6] HE K, GKIOXARI G, DOLLÁR P, et al.Mask R-CNN[C]//Proceedings of the IEEE International Conference on Computer Vision.Piscataway, NJ: IEEE Press, 2017: 2961-2969. [7] DAI J, LI Y, HE K, et al.R-FCN: Object detection via region-based fully convolutional networks[C]//Proceedings of the 30th International Conference on Neural Information Processing Systems.Cambridge: MIT Press, 2016: 379-387. [8] REDMON J, DIVVALA S, GIRSHICK R, et al.You only look once: Unified, realtime object detection[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition.Piscataway, NJ: IEEE Press, 2016: 779-788. [9] LIU W, ANGUELOV D, ERHAN D, et al.SSD: Single shot multibox detector[C]//European Conference on Computer Vision.Berlin: Springer, 2016: 21-37. doi: 10.1007/978-3-319-46448-0_2 [10] FU C Y, LIU W, RANGA A, et al.DSSD: Deconvolutional single shot detector[EB/OL].(2017-01-23)[2019-07-01]. [11] SUN X, SHI J, LIU L, et al.Transferring deep knowledge for object recognition in low-quality underwater videos[J].Neurocomputing, 2018, 275:897-908. doi: 10.1016/j.neucom.2017.09.044 [12] 杨放琼, 谭青, 彭高明.基于长基线系统深海采矿ROV精确定位[J].海洋工程, 2006(3):95-99. doi: 10.3969/j.issn.1005-9865.2006.03.016YANG F Q, TAN Q, PENG G M.Accurate positioning for ROV in deep-sea mining based on LBL acoustic system[J].The Ocean Engineering, 2006(3):95-99(in Chinese). doi: 10.3969/j.issn.1005-9865.2006.03.016 [13] SMITH S M, KRONEN D.Experimental results of an inexpensive short baseline acoustic positioning system for AUV navigation[C]//Proceedings of IEEE Oceans'97.Piscataway, NJ: IEEE Press, 1997, 1: 714-720. [14] MANDIĆ F, RENDULIC I, MISKOVIC N, et al.Underwater object tracking using sonar and USBL measurements[J].Journal of Sensors, 2016, 2016:1-10. [15] MARANI G, CHOI S K, YUH J.Experimental study on autonomous manipulation for underwater intervention vehicles[C]//The Seventeenth International Offshore and Polar Engineering Conference, 2007: 1088-1094. [16] ZANNATHA J M I, LIMON R C, SANCHEZ A D G, et al.Monocular visual self-localization for humanoid soccer robots[C]//21st International Conference on Electrical Communications and Computers.Piscataway, NJ: IEEE Press, 2011: 100-107. [17] LEE P M, JEON B H, HONG S W, et al.System design of an ROV with manipulators and adaptive control of it[C]//Proceedings of the 2000 International Symposium on Underwater Technology.Piscataway, NJ: IEEE Press, 2000: 431-436. [18] ZHANG M, ZHANG L, LI Y.A three-dimensional locating method for underwater robot based on sensors fusion[C]//2009 International Conference on Mechatronics and Automation.Piscataway, NJ: IEEE Press, 2009: 1207-1212. [19] REDMON J, FARHADI A.YoLov3: An incremental improvement[EB/OL].(2018-04-08)[2019-07-02]. 期刊类型引用(15)
1. 罗飞,王润峰. 基于YOLOv5水下目标检测算法研究与改进. 通信与信息技术. 2024(01): 34-40 .  百度学术
百度学术2. 陈宇梁,董绍江,孙世政,闫凯波. 改进YOLOv5s的弱光水下生物目标检测算法. 北京航空航天大学学报. 2024(02): 499-507 .  本站查看
本站查看3. 周玺兴,梁翔宇,胡佳宁,曾立华. 基于负压的浅海养殖海参捕捞系统设计与性能研究. 中国农机化学报. 2024(10): 94-99 . 百度学术4. 杨婷,高武奇,王鹏,李晓艳,吕志刚,邸若海. 自动色阶与双向特征融合的水下目标检测算法. 激光与光电子学进展. 2023(06): 132-143 . 百度学术5. 贾文娟,张孝薇,闫晨阳,李红志. 海洋牧场生态环境在线监测物联网技术研究. 海洋科学. 2022(01): 83-89 . 百度学术6. 范刚,张亚,赵河明,李波. 水下机器人定位导航技术发展现状与分析. 兵器装备工程学报. 2022(03): 22-29 . 百度学术7. 郝琨,王阔,王贝贝. 基于改进Mobilenet-YOLOv3的轻量级水下生物检测算法. 浙江大学学报(工学版). 2022(08): 1622-1632 . 百度学术8. 高天铭,闫敬,尤康林,张良,林景胜,罗小元. 水下智能识别与自主抓取机器人设计与实现. 控制理论与应用. 2022(11): 2074-2083 . 百度学术9. 王伟,李琰. 基于GIS的短时交通客流智能协调控制系统设计. 计算机测量与控制. 2021(01): 154-158 . 百度学术10. 王晓鸣,吴高升. 基于单目视觉的水下机器人相对位姿精确控制. 水下无人系统学报. 2021(03): 299-307 . 百度学术11. 高云,彭炜,周建慧. 机器人智能抓取未知目标位置深度识别仿真. 计算机仿真. 2021(08): 376-380 . 百度学术12. 石少炜,石少敏. 基于虚拟现实的机器人工作状态智能监测系统. 自动化与仪器仪表. 2021(12): 172-175+180 . 百度学术13. 魏哲,焦航. 纱筒搬运机器人的设计. 机械与电子. 2020(08): 76-80 . 百度学术14. 翟国栋,任聪,王帅,岳中文,潘涛,季如佳. 多尺度特征融合的煤矿救援机器人目标检测模型. 工矿自动化. 2020(11): 54-58 . 百度学术15. 于红. 水产动物目标探测与追踪技术及应用研究进展. 大连海洋大学学报. 2020(06): 793-804 . 百度学术其他类型引用(21)
-

 下载:
下载:





 百度学术
百度学术
 点击查看大图
点击查看大图
计量
- 文章访问数: 1611
- HTML全文浏览量: 206
- PDF下载量: 593
- 被引次数: 36
