



-
摘要:
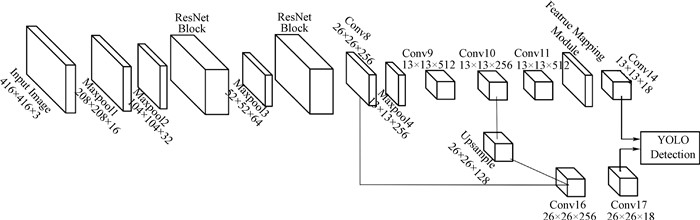
目标检测算法在PASCAL VOC等数据集中取得了非常好的检测效果,但是在大尺度遥感图像中舰船目标的检测准确率却很低。因此,针对可见光遥感图像的特点,在YOLOv3-Tiny算法的基础上增加了特征映射模块,为预测层提供丰富的语义信息,同时在特征提取网络中引用残差网络,提高了检测准确率,从而有效提取舰船特征。实验结果表明:优化后的M-YOLO算法检测准确率为94.12%。相比于SSD和YOLOv3算法,M-YOLO算法的检测准确率分别提高了11.11%和9.44%。
-
关键词:
- 舰船检测 /
- YOLOv3 /
- YOLOv3-Tiny /
- 残差网络 /
- 特征映射模块
Abstract:Although the target detection algorithm has achieved very good detection results in data sets such as PASCAL VOC.However, the accuracy of ship target detection in large-scale prediction images is very low.Therefore, according to the characteristics of the visible light reflection image, a feature mapping module is added on the basis of the YOLOv3-Tiny algorithm, which provides rich semantic information for the prediction layer.At the same time, a residual network is used in the feature extraction network, which improves the detection accuracy and effectively extracts ship features. Experimental results show that the detection accuracy of the optimized M-YOLO algorithm is 94.12%.Compared with the SSD and YOLOv3 algorithms, the detection accuracy of the M-YOLO algorithm is improved by 11.11% and 9.44%.
-
Key words:
- ship detection /
- YOLOv3 /
- YOLOv3-Tiny /
- residual network /
- feature mapping module
-
表 1 PASCAL VOC数据集算法结果对比
模型 mAP/% YOLOv3 YOLOv3-Tiny Person 70.89 57.96 Bird 40.62 22.79 Sheep 53.31 44.41 Cow 53.39 43.68 Dog 54.78 37.83 Horse 76.13 59.96 Motorbike 73.81 61.55 均值 60.42 46.88 模型 mAP/% YOLOv3 YOLOv3-Tiny Aeroplane 64.09 47.14 Bicycle 71.05 61.44 Boat 43.56 27.49 Bus 68.16 58.10 Car 75.87 65.39 Cat 59.31 37.89 Train 75.21 53.92 均值 65.32 50.20 模型 mAP/% YOLOv3 YOLOv3-Tiny Bottle 57.43 47.41 Chair 29.32 13.45 Diningtable 36.04 25.78 Pottedplant 59.66 34.77 sofa 27.60 20.53 Tvmonitor 55.69 31.92 均值 44.29 28.98  下载: 导出CSV
下载: 导出CSV
表 2 舰船数据集算法对比结果
Table 2. Ship dataset algorithm comparison results
算法 AP/% YOLOv3 84.68 YOLOv3-Tiny 87.23
下载: 导出CSV
表 3 舰船检测数据集
Table 3. Ship detection dataset
参数 数值 总数据集 60078 训练集 18023 测试集 24032 训练验证集 360046 验证集 180023
下载: 导出CSV
表 4 实验环境
Table 4. Lab environment
参数 配置 CPU Intel®xeon(R) CPU E5-2620 2.10GHz×12 GPU GeForce GTX TITAN Xp 系统 Ubuntu 16.04 LTS 语言 Python 2.7 加速环境 CUDA9.0,cuDNN7.0 训练框架 Darknet
下载: 导出CSV
表 5 实验对比结果
Table 5. Experimental comparison results
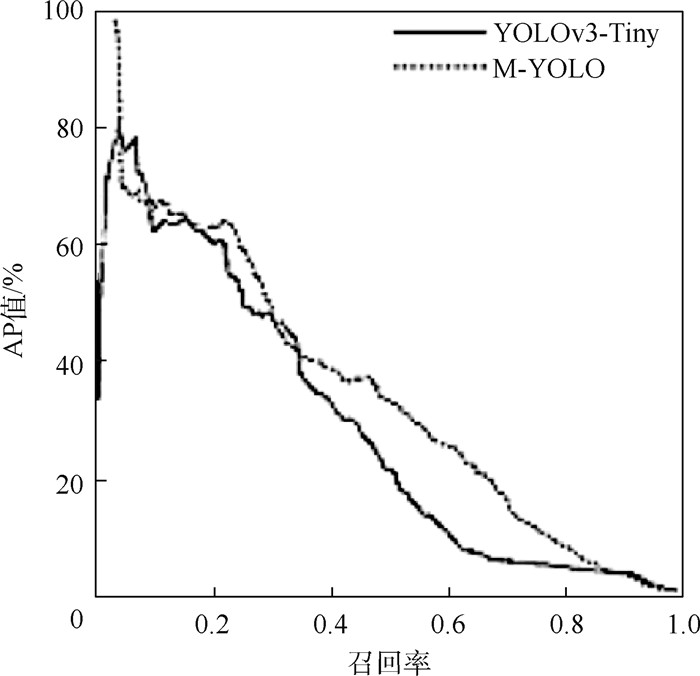
算法 检测准确率/% 帧率/(帧·s-1) SSD 83.01 41 YOLOv3 84.68 43.4 YOLOv3-Tiny 87.23 55.6 M-YOLO 94.12 54.1
下载: 导出CSV
-
[1] KAZEMI F M, SAMADI S, POORREZA H R, et al.Vehicle recognition using curvelet transform and SVM[C]//4th International Conference on Information Technology.Piscataway: IEEE Press, 2007: 516-521. [2] DALAL N, TRIGGS B.Histograms of oriented gradients for human detection[C]//Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition(CVPR).Piscataway: IEEE Press, 2005, 1: 886-893. [3] FREUND Y, SCHAPIRE R E.A desicion-theoretic generalization of on-line learning and an application to boosting[C]//European Conference on Computational Learning Theory.Berlin: Springer, 1995: 23-37. [4] BI F, ZHU B, GAO L, et al.A visual search inspired computational model for ship detection in optical satellite images[C]//IEEE Geoscience & Remote Sensing Letters.Piscataway: IEEE Press, 2012, 9: 749-754. [5] REN S, HE K, GIRSHICK R, et al.Faster R-CNN:Towards real-time object detection with region proposal networks[J] IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6):1137-1149. doi: 10.1109/TPAMI.2016.2577031 [6] REDMON J, FARHADI A.YOLOv3: An incremental improvement[EB/OL].(2018-04-08)[2019-07-18].https://arxiv.org/abs/1804.02767. [7] LIU W, ANGUELOV D, ERHAN D, et al.SSD: Single shot MultiBox detector.ECCV 1[EB/OL].(2016-12-29)[2019-07-18].https://arxiv.org/abs/1512.02325. [8] LIN T Y, DOLLAA'R P, GIRSHICK R, et al.Feature pyramid networks for object detection[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition(CVPR).Piscataway: IEEE Press, 2017: 2117-2125. [9] DAI J, LI Y, HE K, et al.R-FCN: Object detection via region-based fully convolutional networks[C]//Proceedings of the 30th International Conference on Neural Information Processing.La Jolla: NIPS, 2016: 379-387. [10] ZHANG R, YAO J, ZHANG K, et al.S-CNN ship detection from high-resolution remote sensing images[C]//ISPRS-International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2016: 423-430. [11] KANG M, LENG X, LIN Z, et al.A modified faster R-CNN based on CFAR algorithm for SAR ship detection[C]//International Workshop on Remote Sensing with Intelligent Processing.Piscataway: IEEE Press, 2017: 1-4. [12] LIU Y, ZHANG M H, XU P, et al.SAR ship detection using sea-land segmentation-based convolutional neural network[C]//International Workshop on Remote Sensing with Intelligent Processing.Piscataway: IEEE Press, 2017: 1-4. [13] VAN ETTEN A.You only look twice: Rapid multi-scale object detection in satellite imagery[EB/OL].(2018-05-24)[2019-07-18].https://arxiv.org/abs/1805.09512. [14] REDMON J, FARHADI A.YOLO9000: Better, faster, stronger[C]//Proceedings of the IEEE Conference on Computer Visoin and Pattern Recognition(CVPR).Piscataway: IEEE Press, 2017: 6517-6525. [15] HE K, ZHANG X, REN S, et al.Deep residual learning for image recognition[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition(CVPR).Piscataway: IEEE Press, 2016: 770-778. -

 下载:
下载:



 点击查看大图
点击查看大图

计量
- 文章访问数: 954
- HTML全文浏览量: 218
- PDF下载量: 182
- 被引次数: 0
