



Control-oriented modal analysis and dynamic modeling for six-degree-of-freedom piezoelectric vibration isolation platform
-
摘要:
六自由度压电隔振平台各通道之间存在的强耦合性以及压电作动器固有的迟滞非线性都对系统动力学建模提出了挑战。为此,基于模态分析技术对六自由度压电隔振平台开展面向控制的非线性动力学建模研究。在充分考虑压电作动器的迟滞非线性后,采用模态坐标变换方法建立了隔振平台Hammerstein非线性动力学模型,包含了输入端的静态迟滞非线性子系统、解耦的模态方程组以及模态正/反变换矩阵。通过实验测量方法辨识得到模态方程中的参数,采用MPI模型辨识得到静态迟滞非线性子系统,并经过逆补偿控制实验验证了迟滞模型的正确性。基于迟滞逆补偿策略辨识得到模态反变换矩阵。最终建立了平台的动力学模型,为后续的控制奠定了良好的基础。
-
关键词:
- 解耦 /
- 模态分析 /
- 迟滞非线性 /
- 逆补偿 /
- 六自由度压电隔振平台
Abstract:The strong coupling between the channels of the six-degree-of-freedom piezoelectric vibration isolation platform and the inherent hysteresis nonlinearity of the piezoelectric actuator pose challenges to the system dynamic modeling. In this paper, based on modal analysis technology, the control-oriented nonlinear dynamic modeling of six-degree-of-freedom piezoelectric vibration isolation platform is studied. After fully considering the hysteresis nonlinearity of the piezoelectric actuator, the Hammerstein nonlinear dynamic model of the vibration isolation platform is established by the modal coordinate transformation method, including the hysteresis nonlinearity subsystem at the input end, the decoupled modal equations and the modal positive/inverse transformation matrix. The parameters in the modal equation are identified by experimental measurement method. The static hysteresis nonlinear subsystem of the piezoelectric actuator is obtained by MPI model. The correctness of the hysteresis model is verified by inverse compensation control experiment. The modal inverse transformation matrix is obtained based on the hysteresis inverse compensation strategy. Finally, a dynamic model of the platform was established, which laid a good foundation for subsequent control.
-

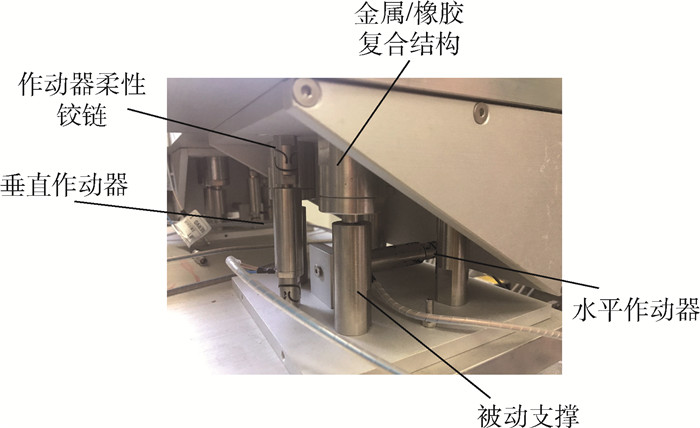
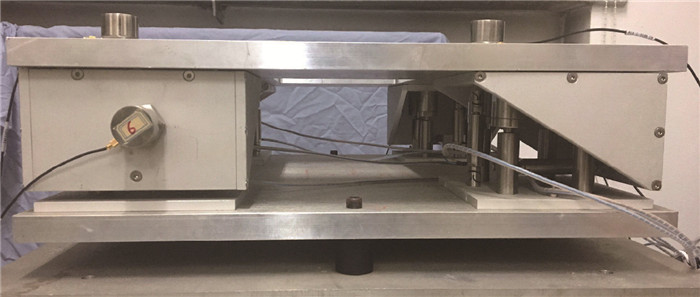
图 1 六自由度压电隔振平台
Figure 1. Six-degree-of-freedom piezoelectric vibration isolation platform

图 2 六自由度压电隔振平台平面图
Figure 2. Planar graph of six-degree-of-freedom piezoelectric vibration vibration isolation platform

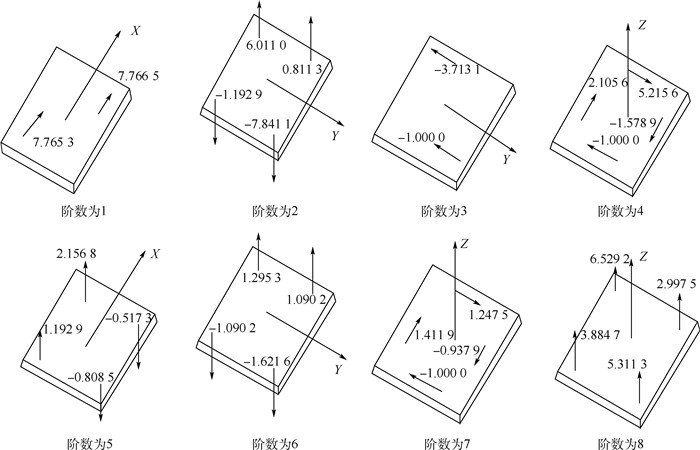
图 11 隔振平台振型辨识结果
Figure 11. Vibration isolation platform vibration type identification results
表 1 模态频率、质量、刚度和阻尼比
Table 1. Modal frequency, mass, stiffness and damping ratio
阶数 模态频率/Hz 质量 刚度/10 9 阻尼比 1 178.581 42.145 0.053268 14.286 2 381.735 21.838 0.13247 30.538 3 1064.865 82.448 3.4952 85.189 4 1375.991 22.980 1.7185 117.37 5 1825.936 28.565 3.7862 152.16 6 2279.569 74.963 1.5413 165.27 7 2356.211 175.62 31.847 173.18 8 2548.429 52.821 1.3543 188.73  下载: 导出CSV
下载: 导出CSV
表 2 MPI模型建模误差
Table 2. Modeling error of MPI model
作动器 RMSE/μm 1 0.0059 2 0.0021 3 0.0013 4 0.0022 5 0.0019 6 0.0028 7 0.0018 8 0.0017
下载: 导出CSV
表 3 逆补偿实验结果
Table 3. Inverse compensation experimental results
作动器 RMSE/μm 1 0.0305 2 0.0063 3 0.0042 4 0.0115 5 0.0095 6 0.026 7 0.0148 8 0.0102
下载: 导出CSV
-
[1] PREMOUNT A.Vibration control of active structures:An introduction[M].Berlin:Springer Science & Business Media, 2002. [2] LIU C C, JING X J, DALEY S, et al.Recent advances in micro-vibration isolation[J].Mechanical Systems and Signal Processing, 2015, 56-57:55-80. doi: 10.1016/j.ymssp.2014.10.007 [3] NAKAMURA Y, NAKAYAMA M, MASUDA K, et al.Development of active 6-DOF micro-vibration control system using giant magnetostrictive actuator[C]//Conference on Smart Systems for Bridges, Structures, and Highways at Smart Structures and Materials 1999.Bellingham: SPIE, 1999, 3671: 229-240. https://www.researchgate.net/publication/252151560_Development_of_6-DOF_microvibration_control_system_using_giant_magnetostrictive_actuator [4] THEIR M, SAATHOF R, SINN A, et al.Six degree of freedom vibration isolation platform for in-line nano-metrology[J].IFAC PapersOnLine, 2016, 49(21):149-156. doi: 10.1016/j.ifacol.2016.10.534 [5] WANG C X, XIE X L, CHEN Y H, et al.Investigation on active vibration isolation of a Stewart platform with piezoelectric actuators[J].Journal of Sound and Vibration, 2016, 383:1-19. doi: 10.1016/j.jsv.2016.07.021 [6] YANG X L, WU H T, CHEN B, et al.Dynamic modeling and decoupled control of a flexible Stewart platform for vibration isolation[J].Journal of Sound and Vibration, 2019, 439:398-412. doi: 10.1016/j.jsv.2018.10.007 [7] 郝慧荣, 白鸿柏, 张慧杰.六自由度主被动一体隔振平台鲁棒控制[J].振动与冲击, 2012, 31(7):122-127. doi: 10.3969/j.issn.1000-3835.2012.07.026HAO H R, BAI H B, ZHANG H J.Robust control of a 6-DOF active-passive vibration isolation platform[J].Journal of Vibration and Shock, 2012, 31(7):122-127(in Chinese). doi: 10.3969/j.issn.1000-3835.2012.07.026 [8] 傅志方, 华宏星.模态分析理论与应用[M].上海:上海交通大学出版社, 2000.FU Z F, HUA H X.Modal analysis theory and application[M].Shanghai:Shanghai Jiao Tong University Press, 2000(in Chinese). [9] MEIROVITCH L, BARUH H.Robustness of the independent modal space control method[J].Journal of Guidance, 1982, 6(1):20-25. doi: 10.2514-3.19797/ [10] ZUO L, SOLTINE J J E.Robust vibration isolation via frequency-shaped sliding control and modal decomposition[J].Journal of Sound and Vibration, 2004, 285(4-5):1123-1149. http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ027830359/ [11] HEERTJES M, DE GRAAFF K, VAN DER TOOM J.Active vibration isolation of metrology frames:A modal decoupled control design[J].Journal of Vibration and Acoustics, 2005, 127(3):223-233. doi: 10.1115/1.1897741 [12] NAKAMURA Y, NAKAYAMAL M, MASUDAL K.Development of active six-degrees-of-freedom microvibration control system using giant magnetostrictive actuators[J].Smart Materials and Structurse, 2000, 9(2):175-185. doi: 10.1088/0964-1726/9/2/308 [13] 侯军芳, 李荣利, 白鸿柏.主动隔振平台模态区间参数模型的独立模态控制方法[J].振动工程学报, 2011, 24(6):670-675. doi: 10.3969/j.issn.1004-4523.2011.06.014HOU J F, LI R L, BAI H B.Independent modal control method for the modal interval parameter model of the active isolation platform[J].Journal of Vibration Engineering, 2011, 24(6):670-675(in Chinese). doi: 10.3969/j.issn.1004-4523.2011.06.014 [14] ZHANG Z, DU C L, GAO T T, et al.Hysteresis modeling and compensation of PZT milliactuator in hard disk drivers[C]//2014 13th International Conference on Control Automation Robotics & Vision(ICARCV).Piscataway: IEEE Press, 2014: 980-984. https://www.researchgate.net/publication/282711097_Hysteresis_modeling_and_compensation_of_PZT_milliactuator_in_hard_disk_drives [15] 王贞艳, 张臻, 周克敏, 等.压电作动器的动态迟滞建模与鲁棒控制[J].控制理论与应用, 2014, 31(1):35-41. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kzllyyy201401005WANG Z Y, ZHANG Z, ZHOU K M, et al.Dynamic hysteresis modeling and robust control of piezoelectric actuators[J].Control Theory and Application, 2014, 31(1):35-41(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kzllyyy201401005 [16] KUHNEN K.Modeling, identification and compensation of complex hysteretic nonlinearities:A modified Prandtl-Ishlinskii approach[J].European Journal of Control, 2003, 9(4):407-418. doi: 10.3166/ejc.9.407-418 [17] YOSHIOKA H, MURAI N.An active microvibration isolation system[C]//Proceeding of the 7th International Workshop on Accelerator Alignment, 2002: 388-401. https://www.researchgate.net/publication/252134273_AN_ACTIVE_MICROVIBRATION_ISOLATION_SYSTEM -

 下载:
下载:










 点击查看大图
点击查看大图
计量
- 文章访问数: 590
- HTML全文浏览量: 108
- PDF下载量: 133
- 被引次数: 0
