



-
摘要:
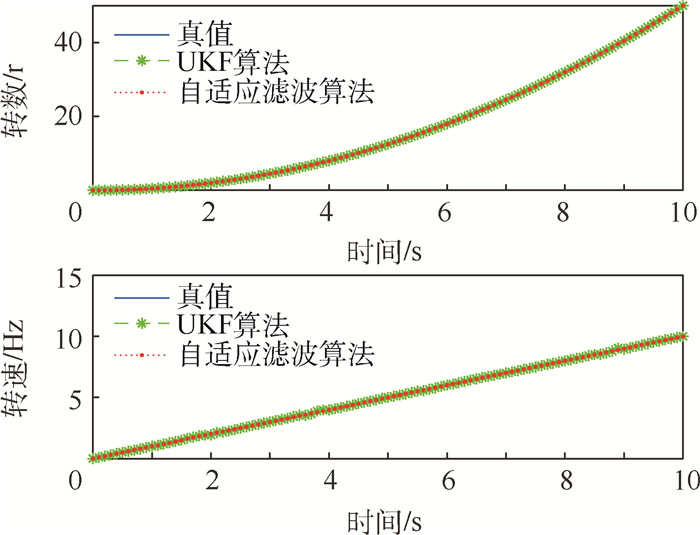
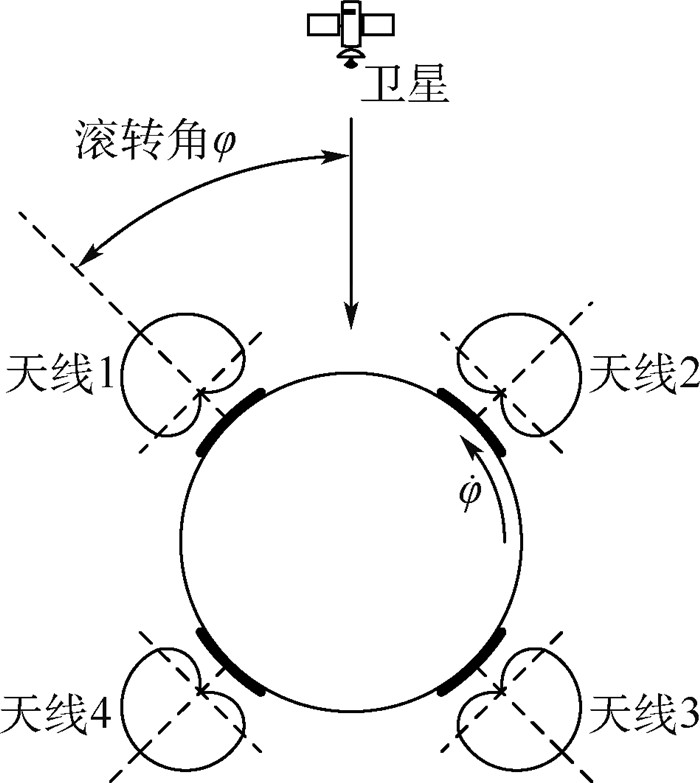
全球定位系统(GPS)测姿技术主要是利用GPS载波相位和信号功率2种方法,但是测量信息单一且独立,针对旋转载体的测姿问题,提出一种基于自适应滤波的GPS滚转角估计方法,通过融合GPS接收机天线信号功率和多普勒频率信息测量载体滚转角和滚转角速度。利用当前统计模型对滚转角和滚转角速度测量进行系统建模,根据滚转角预测估计值选取量测量,并提出自适应滤波,采用滚转角加速度估计自适应滤波算法,实现了对系统噪声方差阵的自适应调整,避免了滚转角加速度最值的选取问题,降低了噪声的影响。通过仿真验证了基于自适应滤波的GPS滚转角估计方法的可行性,结果表明该方法的测量精度高于无迹卡尔曼滤波(UKF)。
-
关键词:
- 全球定位系统(GPS) /
- 当前统计模型 /
- 无迹卡尔曼滤波(UKF) /
- 自适应滤波 /
- 姿态测量
Abstract:The two main techniques for Global Positioning System (GPS) attitude measurement are to use GPS carrier phase and signal power, but the measurement information is single and independent. Aimed at the problem of attitude measurement of a spinning vehicle, a roll angle estimation method using GPS based on adaptive filter is proposed, which measures the roll angle and roll angular velocity by combining signal power and Doppler frequency information of GPS receiver antenna. The system model of the roll angle and roll angular velocity measurement is established by using the current statistical model, the measurements are selected according to the predicted estimation value of the roll angle, and an adaptive filter is proposed. The adaptive filter algorithm of roll angular acceleration estimation is used to realize the adaptive adjustment of the variance matrix of the system noise, which avoids the selection of the roll angle acceleration maximum value and reduces the effect of noise. The feasibility of the roll angle estimation method using GPS based on adaptive filter is verified by simulation, and the results show that the measurement accuracy of the method is higher than that of Unscented Kalman Filter (UKF).
-
表 1 2种算法的均方根误差
Table 1. Root mean square error of two algorithms
机动形式 滤波算法 滚转角/(°) 滚转角速度/((°)·s-1) 滚转角加速度/((°)·s-2) 匀加速 UKF 2.7 10.7 23.8 自适应滤波 1.7 3.7 3.7 正弦 UKF 3.1 28.2 139.3 自适应滤波 2.6 18.6 64.9  下载: 导出CSV
下载: 导出CSV
-
[1] 杨洁, 王新龙, 陈鼎, 等.GNSS定姿技术发展综述[J].航空兵器, 2018(6):16-25. http://d.old.wanfangdata.com.cn/Periodical/hkbq201806003YANG J, WANG X L, CHEN D, et al.Review on the development of GNSS attitude determination technology[J].Aero Weaponry, 2018(6):16-25(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/hkbq201806003 [2] 王冰, 隋立芬, 张清华, 等.利用GPS解算载体测姿的算法研究[J].武汉大学学报(信息科学版), 2013, 38(12):1392-1395. http://d.old.wanfangdata.com.cn/Periodical/whchkjdxxb201312002WANG B, SUI L F, ZHANG Q H, et al.Research on attitude determination algorithms using GPS[J].Geomatics and Information Science of Wuhan University, 2013, 38(12):1392-1395(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/whchkjdxxb201312002 [3] LUO J, VAN DER VELDE W E, TSENG H W, et al.Single antenna GPS measurement of roll rate and roll angle of spinning platform: US9429660[P].2016-08-30. [4] VELDE W V, CAFARELLA J, TSENG H W, et al.GPS-based measurement of roll rate and roll angle of spinning platforms: US2010117894(A1)[P].2010-05-13. [5] 王康, 刘莉, 杜小菁.天线方向图在GPS仿真实验中的应用[J].系统仿真学报, 2010, 22(4):1079-1082. http://d.old.wanfangdata.com.cn/Periodical/xtfzxb201004059WANG K, LIU L, DU X J.Application of antenna radiation pattern in GPS simulation experiment[J].Journal of System Simulation, 2010, 22(4):1079-1082(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/xtfzxb201004059 [6] 谢钢.GPS原理与接收机设计[M].北京:电子工业出版社, 2017.XIE G.Principles of GPS and receiver design[M].Beijing:Publishing House of Electronics Industry, 2017(in Chinese). [7] 张尧.旋转状态下GNSS信号跟踪算法研究及GPU实现[D].长沙: 国防科学技术大学, 2014: 12-14.ZHANG Y.Research of GNSS signal tracking algorithm under spinning condition and complemented by GPU[D].Changsha: National University of Defense Technology, 2014: 12-14(in Chinese). [8] 熊杰, 马勇.GPS多普勒差分测速算法[J].电讯技术, 2018, 58(9):38-42. http://d.old.wanfangdata.com.cn/Periodical/dianxjs201809006XIONG J, MA Y.A velocity determination algorithm via difference GPS Doppler measurements[J].Telecommunication Engineering, 2018, 58(9):38-42(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/dianxjs201809006 [9] 周政, 刘进忙, 谭西江.基于Jerk输入估计的MCS模型及非线性跟踪算法[J].北京航空航天大学学报, 2013, 39(10):1397-1402. https://bhxb.buaa.edu.cn/CN/abstract/abstract12760.shtmlZHOU Z, LIU J M, TAN X J.MCS model based on Jerk input estimation and nonlinear tracking algorithm[J].Journal of Beijing University of Aeronautics and Astronautics, 2013, 39(10):1397-1402(in Chinese). https://bhxb.buaa.edu.cn/CN/abstract/abstract12760.shtml [10] 金学波.Kalman滤波器理论与应用:基于MATLAB实现[M].北京:科学出版社, 2016:120-130.JIN X B.Theory and application of Kalman filter:Realization based on MATLAB[M].Beijing:Science Press, 2016:120-130(in Chinese). [11] 叶文, 蔡晨光, 杨平, 等.融合高斯过程回归的UKF估计方法[J].北京航空航天大学学报, 2019, 45(6):1081-1087. doi: 10.13700/j.bh.1001-5965.2018.0591YE W, CAI C G, YANG P, et al.UKF estimation method incorporating Gaussian process regression[J].Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(6):1081-1087(in Chinese). doi: 10.13700/j.bh.1001-5965.2018.0591 [12] 袁丹丹, 易文俊, 管军, 等.基于UKF弹体滚转姿态测量方法研究[J].弹道学报, 2017, 29(2):8-12. doi: 10.3969/j.issn.1004-499X.2017.02.002YUAN D D, YI W J, GUAN J, et al.Improved neural network enhanced navigation system of adaptive unscented Kalman filter[J].Journal of Ballistics, 2017, 29(2):8-12(in Chinese). doi: 10.3969/j.issn.1004-499X.2017.02.002 [13] 梁小虎, 朱武宣, 郭军海, 等.多级弹道目标主动段机动检测自适应跟踪算法[J].北京航空航天大学学报, 2013, 39(12):1682-1686. https://bhxb.buaa.edu.cn/CN/abstract/abstract12812.shtmlLIANG X H, ZHU W X, GUO J H, et al.Adaptive tracking algorithm based on maneuver detection for multi-stage ballistic target boost phase[J].Journal of Beijing University of Aeronautics and Astronautics, 2013, 39(12):1682-1686(in Chinese). https://bhxb.buaa.edu.cn/CN/abstract/abstract12812.shtml [14] 骆荣剑, 李颖, 钱广华, 等.机动目标跟踪中一种改进的自适应卡尔曼滤波算法[J].重庆邮电大学学报(自然科学版), 2015, 27(1):31-36. http://d.old.wanfangdata.com.cn/Periodical/cqydxyxb-zrkx201501006LUO R J, LI Y, QIAN G H, et al.Improved maneuvering target tracking adaptive Kalman filter algorithm[J].Journal of Chongqing University of Posts and Telecommunications(Natural Science Edition), 2015, 27(1):31-36(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/cqydxyxb-zrkx201501006 [15] 刘朝华, 王勇, 毛玉良, 等.基于MEMS加速度计的弹体滚转角测量方法[J].中国惯性技术学报, 2012, 20(5):505-509. doi: 10.3969/j.issn.1005-6734.2012.05.001LIU Z H, WANG Y, MAO Y L, et al.Measurement method of projectile's roll angle based on MEMS accelerometers[J].Journal of Chinese Inertial Technology, 2012, 20(5):505-509(in Chinese). doi: 10.3969/j.issn.1005-6734.2012.05.001 -

 下载:
下载:





 点击查看大图
点击查看大图
计量
- 文章访问数: 602
- HTML全文浏览量: 74
- PDF下载量: 110
- 被引次数: 0
