



Multi-platform cooperative task planning with decoupling optimization and circulating APF
-
摘要:
为提升协同攻击任务规划效率,借助人工势场(APF)方法求解速度快的优势,提出多平台协同攻击任务规划方法。针对任务规划问题中任务分配与航路规划的耦合问题,提出基于独立航路规划的解耦(ID)与基于直接距离的解耦(DD)2种解耦框架;建立考虑打击目标价值总和、攻击平台与目标距离极差、攻击平台与目标距离总和等因素的指标函数,采用遗传算法进行任务分配求解;提出环流APF方法,避免了传统APF方法因局部极小值而无解的问题,并提出同时到达控制策略与航路冲突规避策略,实现多平台同时到达航路规划。在不同场景下比较了耦合方式、ID、DD 3种任务规划框架的规划结果,并对比了传统APF方法与环流APF方法的航路规划结果。结果表明,解耦方式能够得到与耦合方式接近的结果,并且计算耗时明显低于耦合方式;环流APF方法相比传统APF方法求解可行性更高,航路性能更好。对于存在大块障碍的场景,推荐使用ID方式获得更好的准确度,在障碍稀疏的场景下,推荐使用DD方式以减少计算耗时。
-
关键词:
- 任务规划 /
- 航路规划 /
- 任务分配 /
- 任务解耦 /
- 人工势场法(APF)
Abstract:For better performance in cooperative task planning, a multi-platform task planning method is proposed with the high efficient Artificial Potential Field (APF) method. For the coupling problem of task assignment and path planning in task planning, two decoupling frameworks are presented, namely Decoupling with Independent path planning (ID) and Decoupling with Direct distance (DD). The objective function of task assignment is constructed considering the sum of target value, range of distance between platform and target, and sum of distance between platform and target, and is solved with genetic algorithm. By presenting circulating APF, the no-solution problem of traditional APF method caused by local-minima is avoided, and the simultaneous arrival control strategy and path confliction avoidance strategy are proposed for path planning of multi-platform simultaneous arrival. The simulation is conducted in different scenarios with coupling method, ID and DD. And the path planning results of traditional APF and circulating APF method are also compared. The results suggest that, decoupling methods can reach results close to coupling method but with less time cost than coupling method. And compared with traditional APF method, circulating APF method is characterized with better solution feasibility and path performance. For method application, it is recommended that ID method is used in big block obstacle scenarios for better precision, and DD method is used in sparse obstacle scenarios for better efficiency.
-
Key words:
- task planning /
- path planning /
- task assignment /
- task decoupling /
- Artificial Potential Field (APF)
-

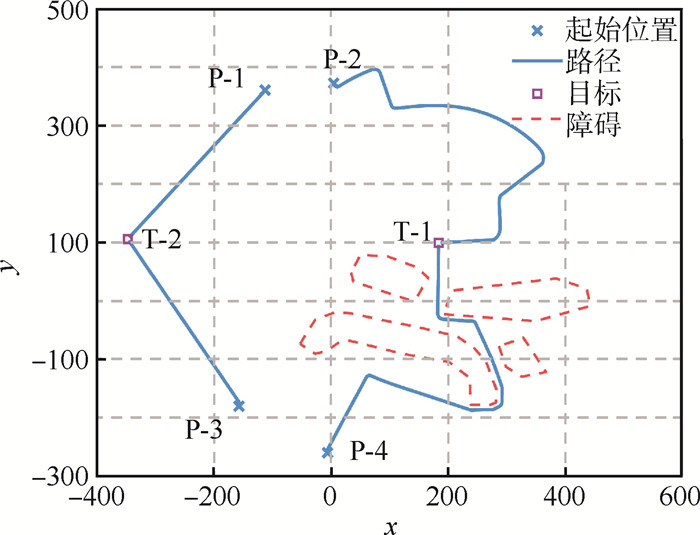
图 5 ID解耦与耦合方式下环流APF方法和传统APF方法的航路规划结果(场景A)
Figure 5. Path planning results of circulating APF and traditional APF with ID decoupling method and coupling method (Scenario A)

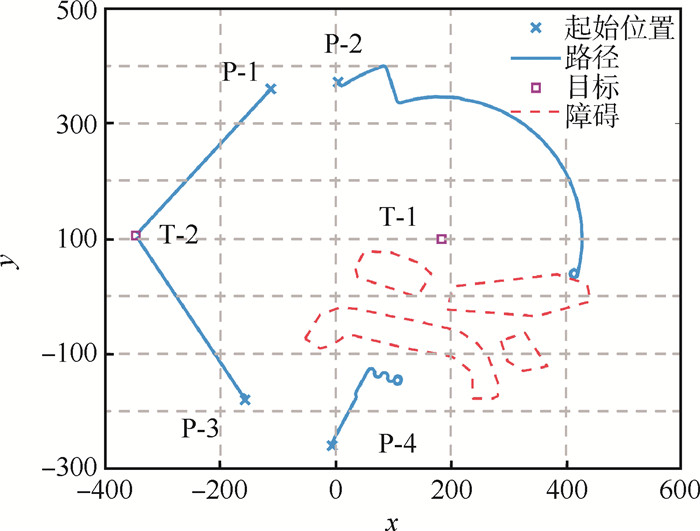
图 6 DD解耦方式下环流APF方法的航路规划结果(场景A)
Figure 6. Path planning results of circulating APF method with DD decoupling method (Scenario A)

图 7 DD解耦方式下传统APF方法的航路规划结果(场景A)
Figure 7. Path planning results of traditional APF method with DD decoupling method (Scenario A)

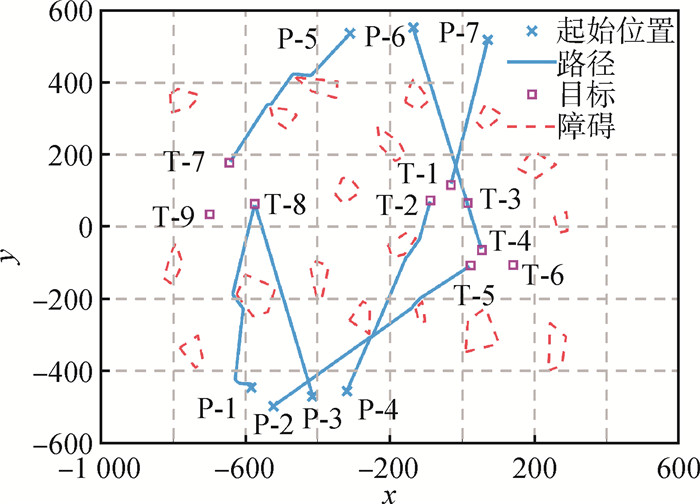
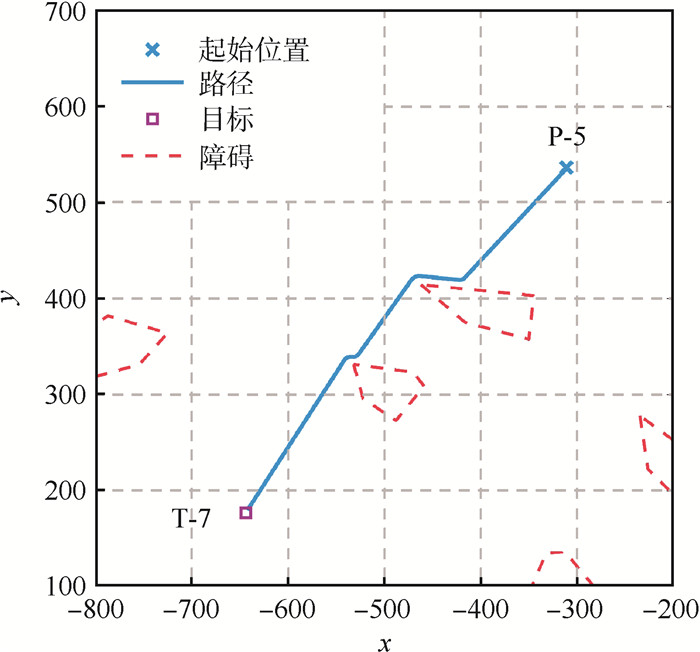
图 8 环流APF方法的航路规划结果(场景B)
Figure 8. Path planning results of circulating APF method (Scenario B)

图 9 传统APF方法的航路规划结果(场景B)
Figure 9. Path planning results of traditional APF method (Scenario B)

图 10 环流APF方法的航路规划细节(场景B)
Figure 10. Path planning result details of circulating APF method (Scenario B)

图 11 传统APF方法的航路规划细节(场景B)
Figure 11. Path planning result details of traditional APF method (Scenario B)
表 1 攻击平台对目标的毁伤概率(场景A)
Table 1. Kill probabilities of attack platforms to targets in Scenario A
攻击平台 T-1 T-2 P-1 0.41 0.65 P-2 0.77 0.70 P-3 0.51 0.64 P-4 0.53 0.72  下载: 导出CSV
下载: 导出CSV
表 3 任务分配结果(场景A)
Table 3. Task assignment results in Scenario A
规划方式 P-1 P-2 P-3 P-4 耦合 T-1 T-1 T-2 T-2 ID T-1 T-1 T-2 T-2 DD T-2 T-1 T-2 T-1
下载: 导出CSV
表 4 攻击平台对目标的毁伤概率(场景B)
Table 4. Kill probabilities of attack platforms to targets in Scenario B
攻击
平台T-1 T-2 T-3 T-4 T-5 T-6 T-7 T-8 T-9 P-1 0.58 0.65 0.72 0.67 0.63 0.46 0.52 0.79 0.50 P-2 0.52 0.74 0.48 0.48 0.66 0.72 0.47 0.44 0.77 P-3 0.64 0.60 0.58 0.56 0.64 0.56 0.64 0.69 0.75 P-4 0.48 0.78 0.47 0.40 0.68 0.76 0.69 0.69 0.72 P-5 0.52 0.56 0.46 0.63 0.52 0.51 0.70 0.71 0.42 P-6 0.45 0.65 0.41 0.66 0.41 0.57 0.48 0.69 0.60 P-7 0.78 0.43 0.42 0.74 0.40 0.63 0.64 0.59 0.49
下载: 导出CSV
表 5 目标价值(场景B)
Table 5. Target value in Scenario B
目标 目标价值 T-1 0.77 T-2 2.20 T-3 0.76 T-4 0.62 T-5 1.70 T-6 0.65 T-7 0.75 T-8 3.30 T-9 0.50
下载: 导出CSV
表 6 任务分配结果(场景B)
Table 6. Task planning results in Scenario B
规划方式 P-1 P-2 P-3 P-4 P-5 P-6 P-7 耦合 T-8 T-5 T-8 T-2 T-7 T-4 T-1 ID T-8 T-5 T-8 T-2 T-7 T-4 T-1 DD T-8 T-5 T-8 T-2 T-7 T-4 T-1
下载: 导出CSV
表 7 不同规划方式下的指标与计算耗时对比
Table 7. Index and time consumption comparison of different planning methods
场景 规划方式 优化
总指标任务分配
耗时/ms航路规划
单步耗时/ms耦合 2.45 508.09 0.82 A ID 2.45 0.79 0.88 DD 2.30 0.27 0.79 耦合 3.07 7498.93 3.57 B ID 3.07 12.50 3.56 DD 3.07 1.10 3.58
下载: 导出CSV
-
[1] BEARD R W, MCLAIN T W, GOODRICH M A, et al.Coordinated target assignment and intercept for unmanned air vehicles[J].IEEE Transactions on Robotics and Automation, 2003, 18(6):911-922. http://faculty.cs.byu.edu/~mike/mikeg/papers/BeardMcLainGoodrichAnderson2002.pdf [2] 杨萍, 刘颖, 裴莹.改进合同网协议的Agent动态任务分配[J].火力与指挥控制, 2011, 36(10):77-80. doi: 10.3969/j.issn.1002-0640.2011.10.021YANG P, LIU Y, PEI Y.Agent dynamic task allocation based on improved contract net protocol[J].Fire Control & Command Control, 2011, 36(10):77-80(in Chinese). doi: 10.3969/j.issn.1002-0640.2011.10.021 [3] 唐苏妍, 梅珊, 朱一凡, 等.基于扩展合同网协议的分布式武器目标分配方法[J].系统工程与电子技术, 2011, 33(3):568-574. doi: 10.3969/j.issn.1001-506X.2011.03.20TANG S Y, MEI S, ZHU Y F, et al.Distributed weapon target assignment algorithm based on extended contract net protocol[J].Systems Engineering and Electronics, 2011, 33(3):568-574(in Chinese). doi: 10.3969/j.issn.1001-506X.2011.03.20 [4] 张昉.无人机任务规划技术研究[D].南京: 南京航空航天大学, 2009.ZHANG F.Research on mission planning technology for unmanned air vehicles[D].Nanjing: Nanjing University of Aeronautics and Astronautics, 2009(in Chinese). [5] 孙小雷, 齐乃明, 姚蔚然, 等.无人机任务分配与航迹规划协同控制方法[J].系统工程与电子技术, 2015, 37(12): 2772-2776. doi: 10.3969/j.issn.1001-506X.2015.12.17SUN X L, QI N M, YAO W R, et al.Cooperative control algorithm of task assignment and path planning for multiple UAVs[J].Systems Engineering and Electronics, 2015, 37(12):2772-2776(in Chinese). doi: 10.3969/j.issn.1001-506X.2015.12.17 [6] ZENG J, DOU L, XIN B.Multi-objective cooperative salvo attack against group target[J].Journal of Systems Science and Complexity, 2018, 31(1):244-261. http://d.old.wanfangdata.com.cn/Periodical/xtkxysx201801017 [7] LUITPOLD B.Coordinated target assignment and UAV path planning with timing constraints[J].Journal of Intelligent and Robotic Systems, 2018, 94:857-869. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=ea4821750423d3d563a78d40d7c34a61 [8] 赵明.多无人机系统的协同目标分配和航迹规划方法研究[D].哈尔滨: 哈尔滨工业大学, 2016.ZHAO M.Research on cooperative target assignment and path planning for Multi-unmanned aircraft system[D].Harbin: Harbin Institute of Technology, 2016(in Chinese). [9] FOSSEN T I, PETTERSEN K Y, GALEAZZI R.Line-of-sight path following for Dubins paths with adaptive sideslip compensation of drift forces[J].IEEE Transactions on Control Systems Technology, 2015, 23(2):820-827. doi: 10.1109/TCST.2014.2338354 [10] YAZICI A, KIRLIK G, PARLAKTUNA O, et al.A dynamic path planning approach for multi-robot sensor-based coverage considering energy constraints[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems.Piscataway: IEEE Press, 2009: 5930-5935. https://www.researchgate.net/publication/224090525_A_dynamic_path_planning_approach_for_multi-robot_sensor-based_coverage_considering_energy_constraints [11] LIU Y, ZHAO Y.A virtual-waypoint based artificial potential field method for UAV path planning[C]//2016 IEEE Chinese Guidance, Navigation and Control Conference (CGNCC).Piscataway: IEEE Press, 2016: 16619076. https://www.researchgate.net/publication/313121057_A_virtual-waypoint_based_artificial_potential_field_method_for_UAV_path_planning [12] MANSOOR D, FATEMEH P, ALI M, et al.Clear and smooth path planning[J].Applied Soft Computing, 2015, 32:568-579. doi: 10.1016/j.asoc.2015.04.017 [13] NIEWOLA A, PODSEDKOWSKI L.L* algorithm—A linear computational complexity graph searching algorithm for path planning[J].Journal of Intelligent and Robotic Systems, 2018, 91:425-444. doi: 10.1007/s10846-017-0748-6 [14] DONATELLI M, GIANNELLI C, MUGNAINI D, et al.Curvature continuous path planning and path finding based on PH splines with tension[J].Computer-Aided Design, 2017, 88:14-30. doi: 10.1016/j.cad.2017.03.005 [15] SASKA M, SPURNY V, VONASEK V, et al.Predictive control and stabilization of nonholonomic formations with integrated spline-path planning[J].Robotics and Autonomous Systems, 2016, 75:379-397. doi: 10.1016/j.robot.2015.09.004 [16] LI N, HUAI W, WANG S.The solution of target assignment problem in command and control decision-making behaviour simulation[J].Enterprise Information Systems, 2016, 11(31):1-19. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=10.1080/17517575.2016.1177207 [17] BAI F, CHANG T Q, LI Y.An improved niche-based adaptive genetic algorithm for WTA problem solving[C]// International Conference on Computational Problem-solving.Piscataway: IEEE Press, 2010: 11763286. https://www.researchgate.net/publication/251986938_An_improved_niche-based_adaptive_genetic_algorithm_for_WTA_problem_solving [18] BAYRAK A E, POLAT F.Employment of an evolutionary heuristic to solve the target allocation problem efficiently[J].Information Sciences, 2013, 222:675-695. doi: 10.1016/j.ins.2012.07.050 [19] ŞAHIN M A, LEBLEBICIOĞLU K.Approximating the optimal mapping for weapon target assignment by fuzzy reasoning[J].Information Sciences, 2014, 255:30-44. doi: 10.1016/j.ins.2013.08.004 -

 下载:
下载:






 点击查看大图
点击查看大图

计量
- 文章访问数: 561
- HTML全文浏览量: 58
- PDF下载量: 130
- 被引次数: 0
