



Active disturbance rejection control method for position servo system based on electro-hydraulic load sensing
-
摘要:
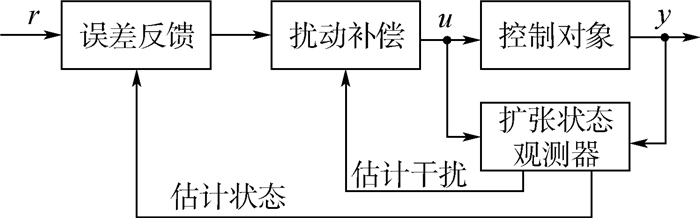
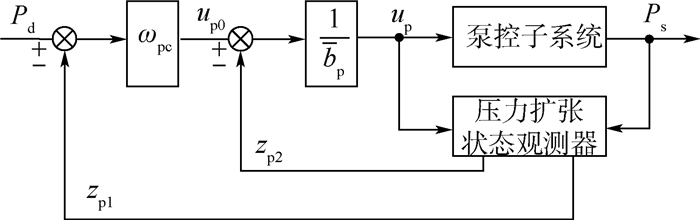
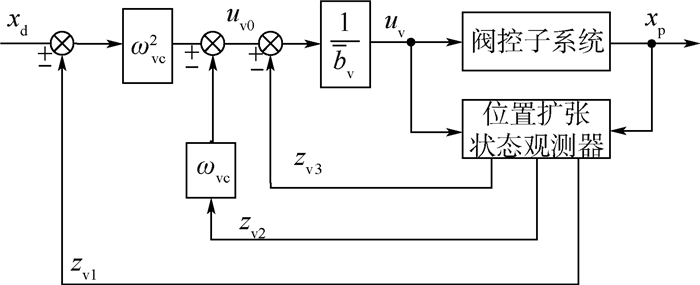
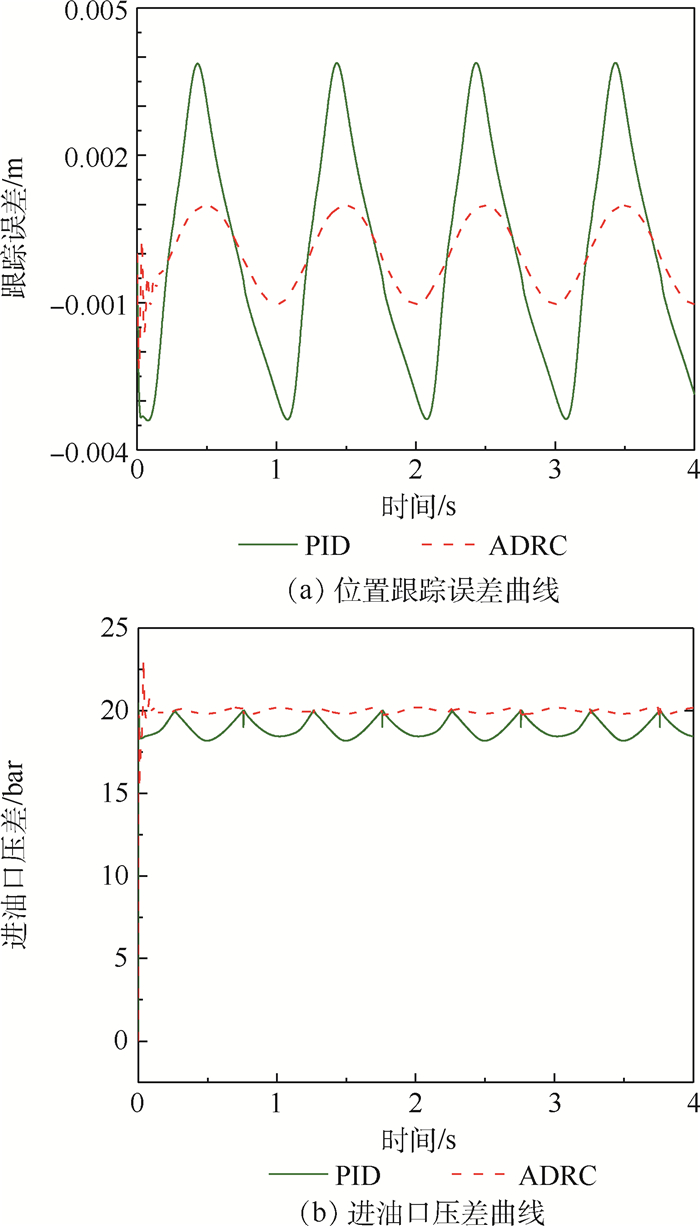
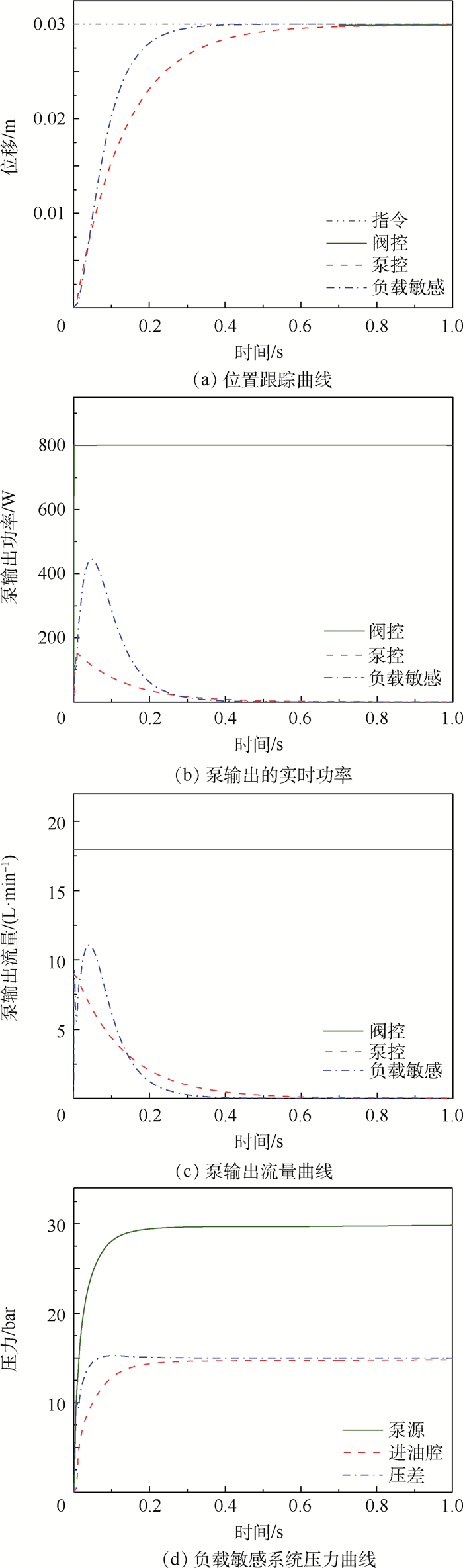
针对电液负载敏感系统中泵阀控制的耦合问题,提出了一种基于自抗扰算法的解耦控制方法。首先,根据系统原理建立了负载敏感系统的状态空间模型。其次,针对阀控和泵控子系统分别设计了位置自抗扰控制器(ADRC)和压力自抗扰控制器,将2个系统间的动态耦合作用以及外部干扰和不确定性视作总扰动进行估计并给予补偿。最后,基于AMESim和MATLAB联合仿真平台进行了仿真分析。结果表明:所提的控制方法能够消除阀控子系统和泵控子系统的强耦合作用,提高系统的控制精度和鲁棒性。另外,在动态性能和节能效率方面与纯阀控和泵控系统进行对比分析,仿真结果表明:基于自抗扰控制的负载敏感系统的动态性能优于泵控系统,系统能效相对于阀控系统也有较大提升。
-
关键词:
- 泵阀协调控制系统 /
- 电液负载敏感 /
- 自抗扰控制器(ADRC) /
- 扩张状态观测器(ESO) /
- 液压伺服系统
Abstract:To deal with the strong interaction between position loop and pressure loop in the electro-hydraulic load sensing control system, we propose a decoupling strategy based on Active Disturbance Rejection Control (ADRC) in this paper. First, according to the equation expressions built by theoretical analysis, the stale space mode model of the load sensing control system was established. Then, position ADRC controller and pressure ADRC controller are designed to control piston position and pump pressure independently. The dynamic interaction between the position loop and pressure loop, external disturbances and uncertainties are treated as total disturbances, which were compensated by ADRC controller. Finally, co-simulation experiment was conducted by using MATLAB and AMESim. The simulation results show that the proposed control strategy can eliminate the strong interaction between the position loop and pressure loop, and improve the control accuracy and robustness of the system. In addition, the dynamic performance and energy-saving efficiency are compared with those of valve-controlled and pump-controlled systems. The simulation results show that the dynamic performance of the load sensing system based on ADRC is better than that of the pump-controlled system, and the energy efficiency is also greatly improved compared with the valve-controlled system.
-

图 1 电液负载敏感位置伺服系统结构
Figure 1. Structure of electro-hydraulic load sensingposition servo system

图 6 MATLAB/Simulink和AMESim联合仿真模型
Figure 6. MATLAB/Simulink and AMESim co-simulation model
表 1 系统仿真参数
Table 1. System simulation parameters
参数 数值 Pr/Pa 0 Ap/m2 6.4×10-4 Cpl/m3·s-1·Pa-1 8.33×10-12 m/kg 10 B/(N·(m·s-1)) 500 Dp/(m3·r-1) 2×10-5 ρ/(kg·m-3) 850 βe/bar 7 000 p 20 ωpo 1 000 ωpc 500 bv 7 ωvo 900 ωpo 300 注:1bar=100kPa。  下载: 导出CSV
下载: 导出CSV
-
[1] PENCELLI M, VILLA R, ARGIOLAS A, et al.Accurate position control for hydraulic servomechanisms[C]//ISARC Proceedings of the International Symposium on Automation and Robotics in Construction.Edmonton: IAARC Publications, 2019: 250-257. [2] GUO K, WEI J H, FANG J F, et al.Position tracking control of electro-hydraulic single-rod actuator based on an extended disturbance observer[J].Mechatronics, 2015, 27:47-56. doi: 10.1016/j.mechatronics.2015.02.003 [3] 汪成文, 尚耀星, 焦宗夏, 等.阀控电液位置伺服系统非线性鲁棒控制方法[J].北京航空航天大学学报, 2014, 40(12):1736-1740. doi: 10.13700/j.bh.1001-5965.2013.0752WANG C W, SHANG Y X, JIAO Z X, et al.Nonlinear robust control of valve controlled electro-hydraulic position servo system[J].Journal of Beijing University of Aeronautics and Astronautics, 2014, 40(12):1736-1740(in Chinese). doi: 10.13700/j.bh.1001-5965.2013.0752 [4] WANG C W, QUAN L, JIAO Z X, et al.Nonlinear adaptive control of hydraulic system with observing and compensating mismatching uncertainties[J].IEEE Transactions on Control Systems Technology, 2017, 26(3):927-938. [5] 彭辉, 王军政, 沈伟, 等.带补偿因子的双模糊控制在电液伺服阀控非对称缸系统上的应用研究[J].机械工程学报, 2017, 53(24):184-192. http://www.cnki.com.cn/Article/CJFDTotal-JXXB201724023.htmPENG H, WANG J Z, SHEN W, et al.Double fuzzy control with compensating factor for electronic-hydraulic servo valve-controlled system[J].Journal of Mechanical Engineering, 2017, 53(24):184-192(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-JXXB201724023.htm [6] 王玄, 陶建峰.泵控非对称液压缸系统高精度位置控制方法[J].浙江大学学报(工学版), 2016, 50(4):597-602. http://www.cnki.com.cn/Article/CJFDTotal-ZDZC201604001.htmWANG X, TAO J F.Precision position control of pump controlled asymmetric cylinder[J].Journal of Zhejiang University(Engineering Science), 2016, 50(4):597-602(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-ZDZC201604001.htm [7] TAO J, WANG X, XIONG Z, et al.Modelling and simulation of unidirectional proportional pump-controlled asymmetric cylinder position control system with model predictive control algorithm[C]//IEEE International Conference on Aircraft Utility Systems.Piscataway: IEEE Press, 2016: 408-413. [8] BA D X, AHN K K, TRUONG D Q, et al.Integrated model-based backstepping control for an electro-hydraulic system[J].International Journal of Precision Engineering and Manufacturing, 2016, 17(5):565-577. doi: 10.1007/s12541-016-0069-x [9] KETELSEN S, SCHMIDT L, DONKOV V H, et al.Energy saving potential in knuckle boom cranes using a novel pump controlled cylinder drive[J].Modeling, Identification and Control, 2018, 39(2):73-89. doi: 10.4173/mic.2018.2.3 [10] SHEN W, PANG Y, JIANG J H.Robust controller design of the integrated direct drive volume control architecture for steering systems[J].ISA Transactions, 2018, 78:116-129. doi: 10.1016/j.isatra.2017.05.008 [11] 王军政, 赵江波, 汪首坤.电液伺服技术的发展与展望[J].液压与气动, 2014(5):1-12.WANG J Z, ZHAO J B, WANG S K.The development and future trends of electro-hydraulic servo technology[J].Chinese Hydraulics & Pneumatics, 2014(5):1-12(in Chinese). [12] 黄泽平, 娄贺, 王纪森.基于负载敏感技术的新型EHA设计与仿真分析[J].液压气动与密封, 2012, 32(7):31-33. http://www.cnki.com.cn/Article/CJFDTotal-YYQD201207009.htmHUANG Z P, LOU H, WANG J S.Design and simulation analysis of a new type EHA dased on load-sensing technology[J].Hydraulics Pneumatics & Seals, 2012, 32(7):31-33(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-YYQD201207009.htm [13] 袁士豪, 殷晨波, 刘世豪.机械负载敏感定量泵系统性能分析[J].农业工程学报, 2013, 29(13):38-45.YUAN S H, YIN C B, LIU S H.Performance analysis of machinery load sensitive quantitative pump system[J].Transactions of the Chinese Society of Agricultural Engineering, 2013, 29(13):38-45(in Chinese). [14] 张哲.基于变频调节的快锻液压机泵阀复合控制研究[D].秦皇岛: 燕山大学, 2014.ZHANG Z.The study on accumulator fast forcing subsystem of 0.6 mn sinusoidal pump-controlled press[D].Qinhuangdao: Yanshan University, 2014(in Chinese). [15] 谢文.串联式泵阀协控电液伺服控制系统研究[D].北京: 北京理工大学, 2015.XIE W.Research on serial type pump-valve coordinated electric-hydraulic servo control system[D].Beijing: Beijing Institute of Technology, 2015(in Chinese). [16] 徐兵, 程敏, 杨华勇, 等.带旁路压力补偿的电液流量匹配系统[J].浙江大学学报(工学版), 2015, 49(9):1762-1767.XU B, CHENG M, YANG H Y, et al.Electrohydraulic flow matching system with bypass pressure compensation[J].Journal of Zhejiang University(Engineering Science), 2015, 49(9):1762-1767(in Chinese). [17] 程敏, 于今, 丁孺琦, 等.基于流量前馈与压力反馈复合控制的电液负载敏感系统[J].机械工程学报, 2018, 54(20):262-270.CHENG M, YU J, DING R Q, et al.Electrohydraulic load sensing system via compound control of flow feedforward and pressure feedback[J].Journal of Mechanical Engineering, 2018, 54(20):262-270(in Chinese). [18] CHO S H, NOSKIEVI P.Position tracking control with load-sensing for energy-saving valve-controlled cylinder system[J].Journal of Mechanical Science and Technology, 2012, 26(2):617-625. doi: 10.1007/s12206-011-1032-5 [19] MERRITT H E.Hydraulic control systems[M].New York:John Wiley & Sons, 1967:90-100. [20] DJUROVIC M, HELDUSER S.New control strategies for electrohydraulic load-sensing[C]//Bath Workshop on Power Transmission and Motion Control.Dresden: Professional Engineering Publishing, 2004: 201. [21] WANG C, QUAN L, ZHANG S, et al.Reduced-order model based active disturbance rejection control of hydraulic servo system with singular value perturbation theory[J].ISA Transactions, 2017, 67:455-465. doi: 10.1016/j.isatra.2017.01.009 [22] HAN J.From PID to active disturbance rejection control[J].IEEE Transactions on Industrial Electronics, 2009, 56(3):900-906. doi: 10.1109/TIE.2008.2011621 [23] GAO Z.Scaling and bandwidth-parameterization based controller-tuning[C]//Proceedings of the 2003 American Control Conference.Piscataway: IEEE Press, 2003: 4989-4996. [24] HUANG Y, XUE W C.Active disturbance rejection control:Methodology and theoretical analysis[J].ISA Transations, 2014, 53:963-976. doi: 10.1016/j.isatra.2014.03.003 [25] 韩京清.自抗扰控制技术:估计补偿不确定因素的控制技术[M].北京:国防工业出版社, 2008:60-70.HAN J Q.Active disturbance rejiection control technique-The technique for estimating and compensating the uncertainties[M].Beijing:National Defense Industry Press, 2008:60-70(in Chinese). [26] HERBST G.A simulative study on active disturbance rejection control (ADRC) as a control tool for practitioners[J].Electronics, 2013, 2(3):246-279. -

 下载:
下载:





 点击查看大图
点击查看大图

计量
- 文章访问数: 763
- HTML全文浏览量: 182
- PDF下载量: 96
- 被引次数: 0
