



KBLMS channel compensation multipath mitigation algorithm based on BDS/GPS
-
摘要:
在全球卫星导航系统(GNSS)中,针对城市峡谷单系统无法定位及信号失锁后重新捕获及跟踪性能表现不佳的问题,提出了一种基于BDS/GPS的卡尔曼最小均方估计(KBLMS)的信道补偿技术。首先,建立双系统模型。其次,设计基于卡尔曼估计的最小均方误差的延迟估计模块,补偿接收信号上的多径失真。最后,设计视距(LOS)最佳估计块以在反馈回路中产生控制误差信号,用于自适应地更新补偿矩阵系数。通过实测数据与实验仿真,分析KBLMS的信道补偿多径缓减算法的性能。结果表明:KBLMS的信道补偿多径缓减技术相较于最小均方(LMS)算法在多径信道中能快速收敛,且码跟踪误差在ENU三个维度误差减少了0.1 chip,载波跟踪误差减少了约0.125 cm,有效降低了多径效应引起的误差,最终残余误差比LMS降低了0.035 chip,说明所提多径缓减算法可以进行更为精准的估计,从而验证了算法的有效性。
-
关键词:
- 全球卫星导航系统(GNSS) /
- 多径缓解 /
- 卡尔曼最小均方估计(KBLMS) /
- 多径时延 /
- 视距(LOS)估计
Abstract:In the Global Navigation Satellite System (GNSS), a channel compensation technique based on BDS/GPS Kalman Based Least Mean Square estimation (KBLMS) is proposed to address the problems that the single system cannot locate in the city canyon, the signal cannot be captured after locking, and the tracking performance is poor. Firstly, a dual system model is established. Secondly, the delay estimation module based on the minimum mean square error of Kalman estimation is designed to compensate the multipath distortion on the received signal. Finally, the Line-of-Sight (LOS) optimal estimation block is designed to generate a control error signal in the feedback loop for adaptively updating the filter coefficients. The performance of KBLMS channel compensation multipath mitigation algorithm is analyzed through measured data and experimental simulation. The results show that, compared with Least Mean Square (LMS) algorithm, the KBLMS channel compensation multipath mitigation technology can fast converge in the multipath channel, the code tracking error in ENU three dimensions reduces by 0.1 chip, carrier tracking error decreases by about 0.125 cm, the error due to multipath effect effectively reduces, and the final residual error decreases by 0.035 chip. This shows that the multipath algorithm can do more accurate estimation, which verifies the effectiveness of the algorithm.
-
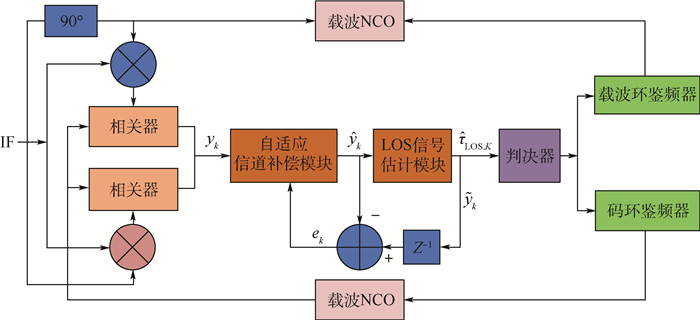
图 1 基于KBLMS自适应滤波的延迟估计模型
Figure 1. Delay estimation model based on KBLMS adaptive filtering

图 5 LOS信号估计模块中码跟踪误差对应载噪比
Figure 5. Code tracking error corresponding to load-to-noise ratio in LOS signal estimation module
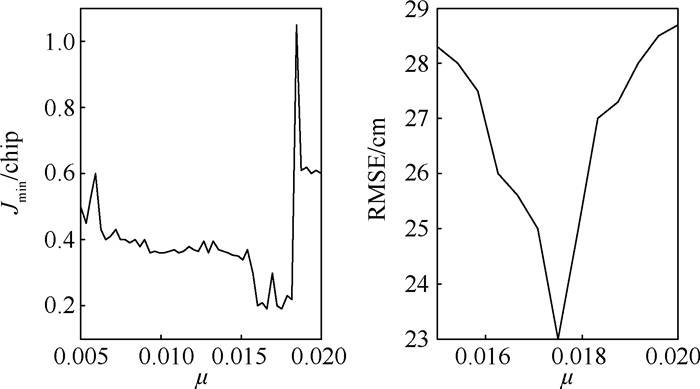
图 6 LOS信号估计模块的均方根误差和作为步长函数的代价函数变化
Figure 6. Root mean square error of LOS signal estimation module and change of cost function as step size function
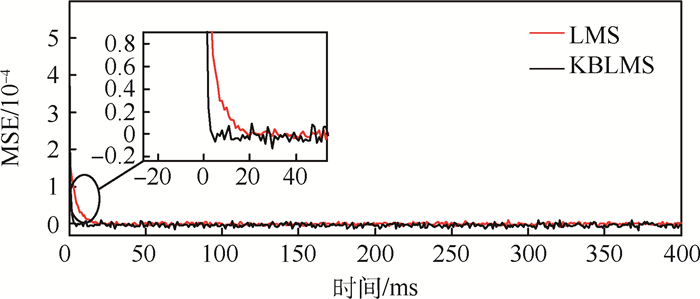
图 7 跟踪环路中两种优化算法的收敛性能比较(C/N0=40 dB/Hz, μ=0.017 5)
Figure 7. Convergence performance comparison of two optimization algorithms in tracking loop (C/N0= /Hz, μ=0.017 5)
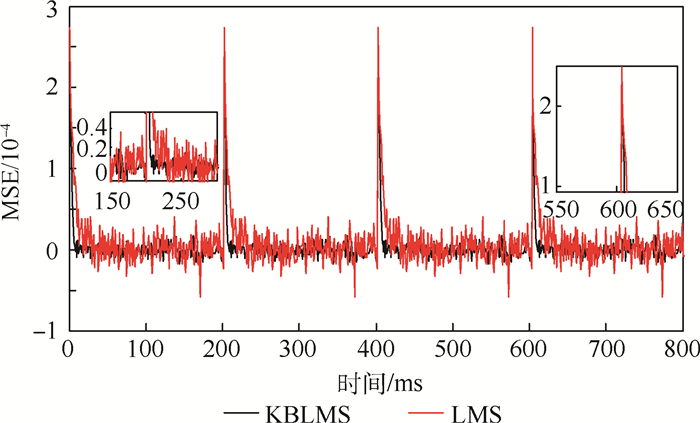
图 8 信号失锁情况下两种优化算法的跟踪性能比较(C/N0=40 dB/Hz, μ=0.017 5)
Figure 8. Tracking performance comparison of two optimization algorithms in the event of loss of signal lock (C/N0=40 dB/Hz, μ=0.017 5)
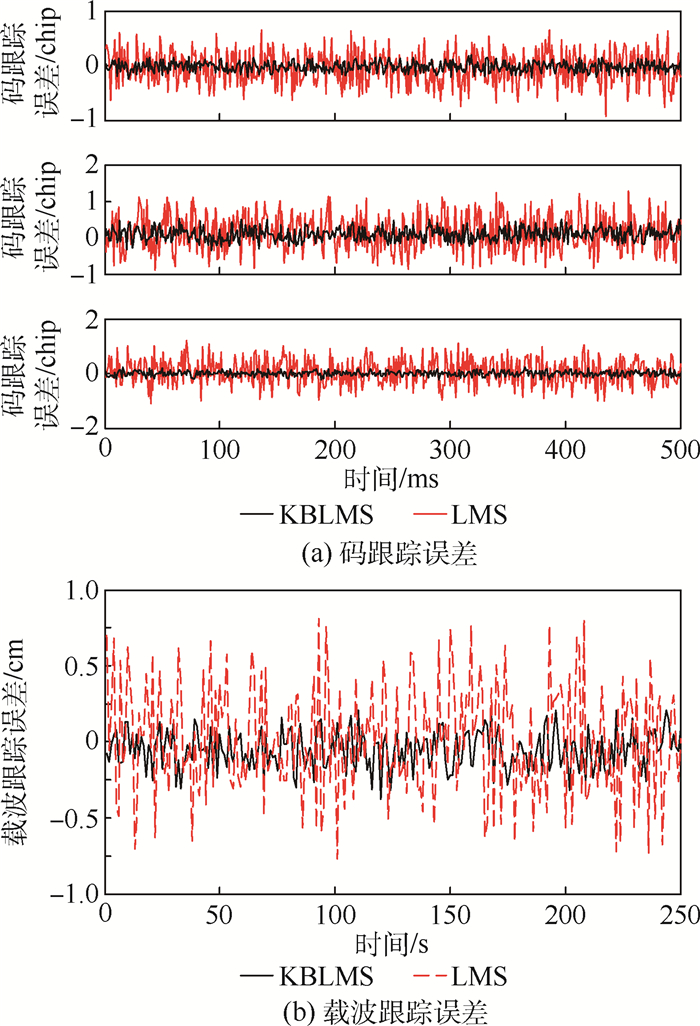
图 9 两种优化算法的码跟踪误差和载波跟踪误差比较
Figure 9. Comparison of code tracking errors and carrier tracking errors between two optimization algorithms

图 10 两种优化算法的最终残余误差比较(C/N0=40 dB/Hz, μ=0.017 5)
Figure 10. Final residual error comparison of two optimization algorithms (C/N0=40 dB/Hz, μ=0.017 5)
表 1 实验仿真参数
Table 1. Experiment simulation parameter
参数 数值 接收机类型 GPS/BDS双模两频点 频点/MHz L1(1 575.42),B1(1 561.098) 带宽/MHz 2.046(L1),1.092(B1) 采样频率/MHz 10 量化数据/bit 4 中频信号频率/MHz 2.5 供电方式/V 5 设备接口 USB2.0 天线接口 TNC制接头 整机功耗/W < 10  下载: 导出CSV
下载: 导出CSV
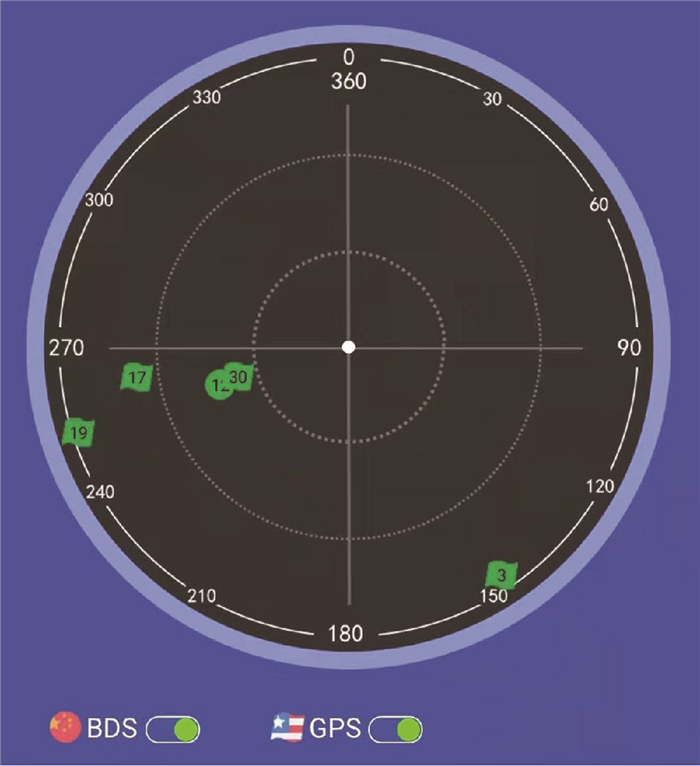
表 2 卫星参数
Table 2. Satellite parameters
卫星 
BDS/GPS卫星 B12 38 G3 43 G17 38 G19 40 G30 41 PDOP 1.35 VDOP 1.11 HDOP 0.77 注:C/N0为载噪比。
下载: 导出CSV
表 3 实验仿真参数设计
Table 3. Parameter design of experimental simulation
参数 数值 城市 太原 海拔/m 788 BDS频率(B1)/MHz 1 561.08±2.06 GPS频率(L1)/MHz 1 575.42±1.023 时间/min 3
下载: 导出CSV
-
[1] 李惟, 朱云龙, 王峰, 等.GNSS多径信号模型及测高方法[J].北京航空航天大学学报, 2018, 44(6):1239-1245. doi: 10.13700/j.bh.1001-5965.2017.0417LI W, ZHU Y L, WANG F, et al.GNSS multipath signal model and altimetry method[J].Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(6):1239-1245(in Chinese). doi: 10.13700/j.bh.1001-5965.2017.0417 [2] 廖希, 薛睿, 赵旦峰.一种适用于双卫星系统窄带LMS信道的状态模型[J].西安电子科技大学学报, 2015, 42(1):161-167. doi: 10.3969/j.issn.1001-2400.2015.01.026LIAO X, XUE R, ZHAO D F.State modeling of the narrowband LMS channel suitable for dual-satellite systems[J].Journal of Xidian University, 2015, 42(1):161-167(in Chinese). doi: 10.3969/j.issn.1001-2400.2015.01.026 [3] MILLER S, ZHANG X, SPANIAS A.A new asymmetric correlation kernel for GNSS multipath mitigation[C]//2015 Sensor Signal Processing for Defence, 2015: 15490738. [4] JIA Q, WU R B, WANG W Y, et al.Multipath interference mitigation in GNSS via WRELAX[J].GPS Solutions, 2018, 21(2):487-498. doi: 10.1007/s10291-016-0538-9 [5] CHEN X, DOVIS F, PINI M.An innovative multipath mitigation method using coupled amplitude delay locked loops in GNSS receivers[J].IEEE/ION Position, Location and Navigation Symposium.Piscataway:IEEE Press, 2010:1118-1126. [6] RUI X, SUN Y B, ZHAO D F.CPM signals for satellite navigation in the S and C bands[J].Sensors, 2015, 15(6):13184-13200. doi: 10.3390/s150613184 [7] ROST C, WANNINGER L.Carrier phase multipath mitigation based on GNSS signal quality measurements[J].Journal of Applied Geodesy, 2009, 3(2):81-87. [8] CANNON M E, LACHAPELLE G, QIU W, et al.Performance analysis of a narrow correlator spacing receiver for precise static GPS positioning[C]//Position Location and Navigation Symposium.Piscataway: IEEE Press, 1994: 355-360. [9] DE BAKKER P F, VAN DER MAREL H, TIBERIUS C C J M.Geometry-free undifferenced, single and double differenced analysis of single frequency GPS, EGNOS and GIOVE-A/B measurements[J].GPS Solutions, 2009, 13(4):305-314. doi: 10.1007/s10291-009-0123-6 [10] SÁNCHEZFERNÁNDEZ M, AGUILERAFORERO M, GARCÍ-AARMADA A.Performance analysis and parameter optimization of DLL and MEDLL in fading multipath environments for next generation navigation receivers[J].IEEE Transactions on Consumer Electronics, 2007, 53(4):1302-1308. doi: 10.1109/TCE.2007.4429216 [11] TOWNSEND B, WIEBE J, JAKAB A.Results and analysis of using the MEDLL receiver as a multipath meter[C]//Proceedings of the National Technical Meeting of the Institute of Navigation, 2000: 73-79. [12] YUAN G, FENG L, TENG L.Analysis of multipath parameter estimation accuracy in MEDLL algorithm[C]//China Satellite Navigation Conference (CSNC) 2013 Proceeding, 2013: 597-606. [13] SAHMOUDI M, AMIN M.Fast iterative maximum-likelihood algorithm (FIMLA) for multipath mitigation in the next generation of GNSS receivers[J].IEEE Transactions on Wireless Communications, 2008, 7(11):4362-4374. doi: 10.1109/T-WC.2008.070700 [14] STAUDER J.Estimation of point light source parameters for object-based coding[J].Signal Processing Image Communication, 1995, 7(4-6):355-379. doi: 10.1016/0923-5965(95)00008-7 [15] SECO-GRANADO G, FERNANDEZ-RUBIO J A, FERNANDEZ-PRADES C.ML estimator and hybrid beamformer for multipath and interference mitigation in GNSS receivers[J].IEEE Transactions on Signal Processing, 2005, 53(3):1194-1208. doi: 10.1109/TSP.2004.842193 [16] YAN G, WEI L, LI J, et al.A new iterative method for multipath mitigation[C]//China Satellite Navigation Conference (CSNC) 2015 Proceedings, 2015: 667-676. [17] SADRIEH S N, BROUMANDAN A, LACHAPELLE G.Doppler characterization of a mobile GNSS receiver in multipath fading channels[J].Journal of Navigation, 2012, 65(3):477. doi: 10.1017/S037346331200015X [18] SOKHANDAN N, BROUMANDAN A, CURRAN J T, et al.Accurate GNSS range estimation in multipath environments using stochastic-gradient-based adaptive filtering[J].Navigation, 2016, 63(1):39-52. doi: 10.1002/navi.126 [19] CHEN X.Statistical multipath model comparative analysis of different GNSS orbits in static urban canyon environment[J].Advances in Space Research, 2018, 62(5):39-52. [20] CHANG H K, SUN Y K, CHAN G P.An adaptive Kalman filtering approach to Fourier analysis for estimating various chirp-type GNSS interference frequencies:Chirp-type GNSS interference frequency tracking[J].Navigation, 2018, 65(1):3-13. doi: 10.1002/navi.217 -

 下载:
下载:




 点击查看大图
点击查看大图
计量
- 文章访问数: 608
- HTML全文浏览量: 111
- PDF下载量: 69
- 被引次数: 0
