



-
摘要:
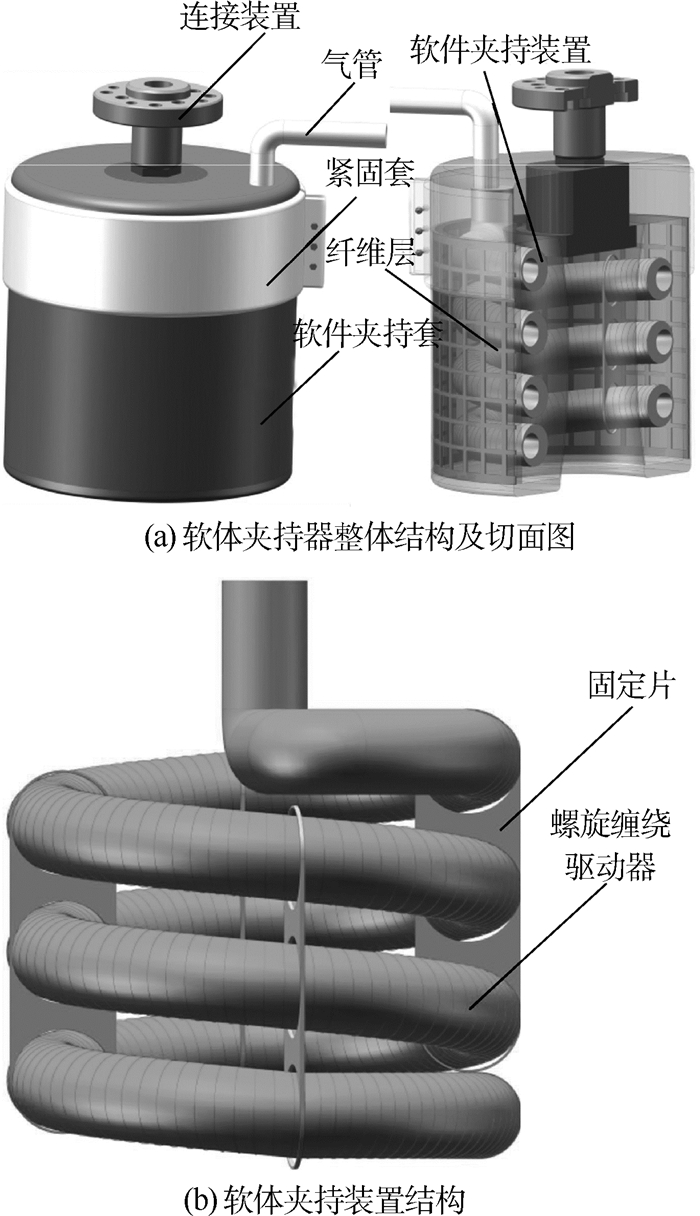
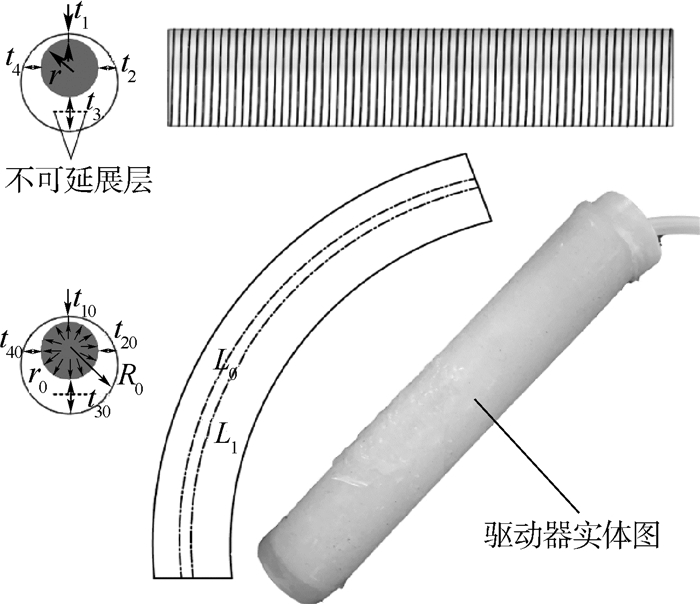
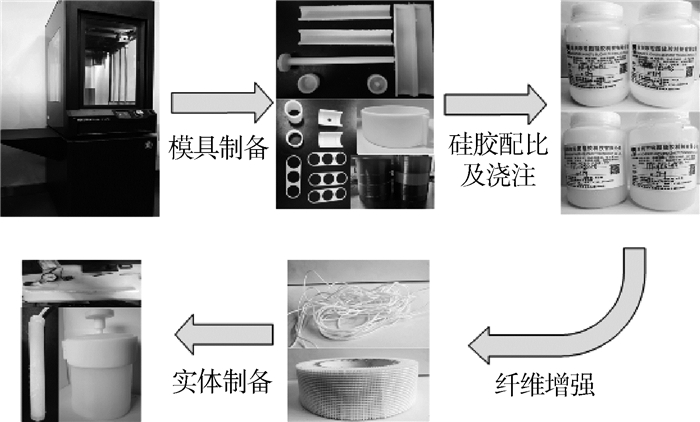
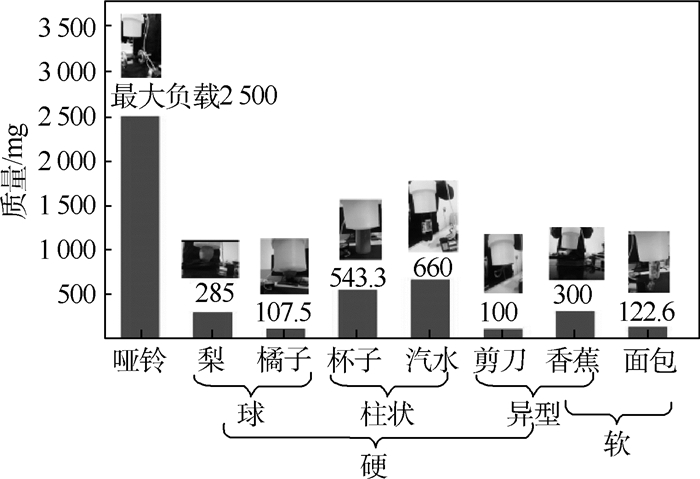
针对目前软体夹持器缺乏螺旋缠绕变形的理论研究及传统多指软体夹持器夹持力不足的问题,开展了针对纤维增强结构的仿生软体夹持器螺旋缠绕变形特性的研究,提出了一种新的封闭式抓取方式。首先,设计了仿生软体夹持器,该夹持器由软体夹持装置、软体夹持套、紧固套及连接装置组成。其次,基于Mooney-Rivlin模型建立了驱动压强与驱动器螺旋缠绕变形后端面扭转角度的非线性数学模型,并对夹持器封闭式抓取的末端闭合特性进行了分析。然后,开展了单元驱动器螺旋缠绕变形的仿真及实验,结果证明了理论模型的正确性。最后,进行了仿生软体夹持器封闭式抓取实验。结果表明:封闭式仿生软体夹持器具有较大的负载能力及良好的目标适应性。
Abstract:Aimed at the problems of lacking the theoretical research on the spiral winding deformation for soft gripper and the traditional soft gripper having a low load capacity, the research on the spiral deformation characteristics and the closed capture form of the fiber-reinforced bionic soft gripper was carried out. First, a bionic soft gripper was designed, which is composed of a software holding device, a soft clamping sleeve, a fixing sleeve and a connecting device. Secondly, a nonlinear mathematical model of the driving pressure and the torsion angle of the soft driver end face is established based on the Mooney-Rivlin model. And the end-closing characteristics of the soft gripper were analyzed. Then, the simulation and experiment of the unit spiral wound drive were carried out. The results prove the correctness of the theoretical model. Finally, the closed grabbing experiment of the bionic soft gripper was carried out. Experimental results show that the closed bionic soft gripper has a large load capacity and good target adaptability.
-
Key words:
- spiral winding deformation /
- fiber-reinforced structure /
- bionic /
- soft gripper /
- closed form /
- Mooney-Rivlin model
-

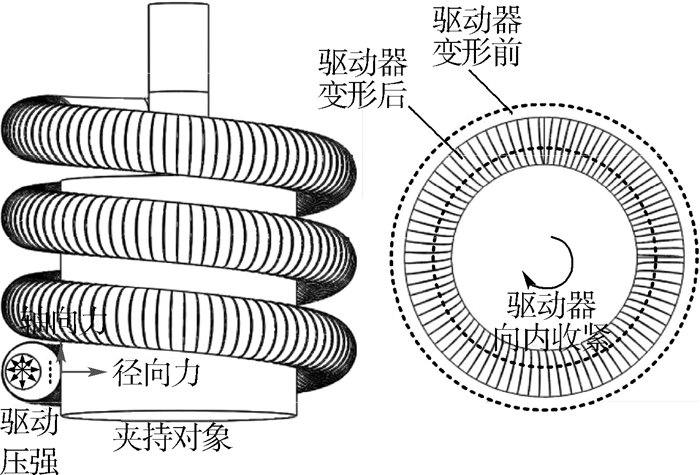
图 4 螺旋缠绕驱动器结构变形及受力示意图
Figure 4. Structural deformation and force diagram of spiral wound actuator

图 9 单元螺旋缠绕驱动器仿真示意图
Figure 9. Schematic diagram of unit spiral winding simulation of actuator

图 13 驱动器端面扭转角相对误差对比
Figure 13. Torsion angle relative error comparison of actuator end face
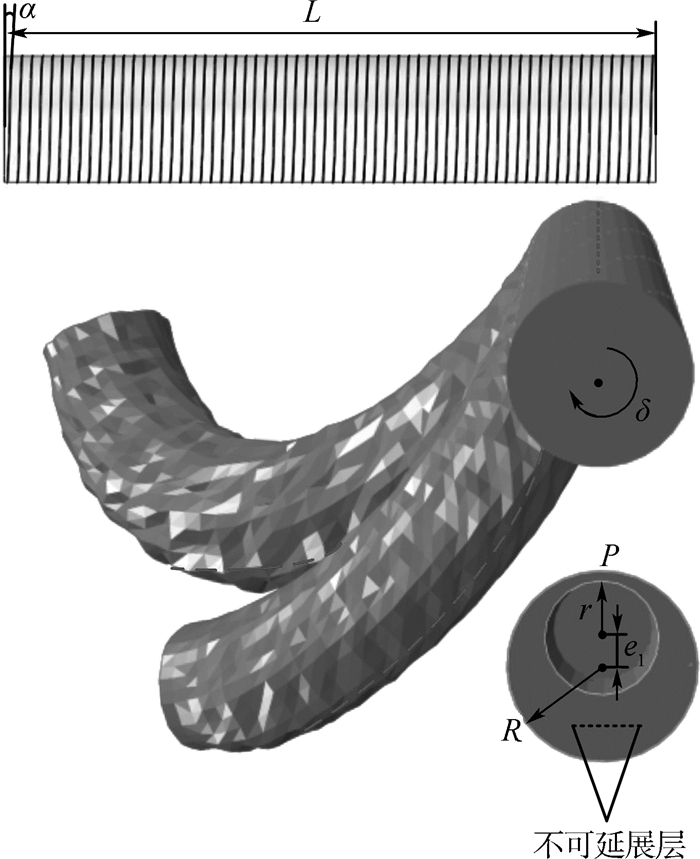
表 1 单元螺旋缠绕驱动器结构参数
Table 1. Unit spiral wound actuator structure parameters
参数 数值 单元驱动器长度L/mm 110 单元驱动器空腔半径r/mm 6 单元驱动器半径R/mm 10 单元驱动器偏心距e1/mm 3 螺纹线圈缠绕角度α/(°) 3  下载: 导出CSV
下载: 导出CSV
表 2 螺旋缠绕驱动器末端端面扭转角
Table 2. End face torsion angle of spiral wound actuator
P/kPa 端面扭转角/(°) 理论值 仿真值 实验值 0 0 0 0 10 19.97 20.6 18.5 20 39.51 40.3 37 30 55.25 58.4 50.6 40 70.86 75.8 68.4 50 85.73 92.2 79.5 60 99.42 107.1 96.5 70 112.74 122.8 109.6
下载: 导出CSV
-
[1] GRUNERT K G.Food quality and safety:Consumer perception and demand[J].European Review of Agricultural Economics, 2005, 32(3):369-391. doi: 10.1093/eurrag/jbi011 [2] FANTONI G, SANTOCHI M, DINI G, et al.Grasping devices and methods in automated production processes[J].CIRP Annals-Manufacturing Technology, 2014, 63(2):679-701. doi: 10.1016/j.cirp.2014.05.006 [3] TAI K, EL-SAYED A R, SHAHRIARI M, et al.State of the art robotic grippers and applications[J].Robotics, 2016, 5(2):1-20. http://www.researchgate.net/publication/304037147_State_of_the_Art_Robotic_Grippers_and_Applications [4] 董红兵.一种充气式软体全向弯曲模块关键技术研究[D].哈尔滨: 哈尔滨工业大学, 2016.DONG H B.Research on key technologies of a pneumatic soft omnidirectional bending module[D].Harbin: Harbin Institute of Technology, 2016(in Chinese). [5] YAP H, KAMALDIN N, LIM J, et al.A magnetic resonance compatible soft wearable robotic glove for hand rehabilitation and brain imaging[J].IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2017, 6(25):782-793. http://ieeexplore.ieee.org/document/7552551/ [6] NORITSUGU T.Development of pneumatic rotary soft actuator made of silicon rubber[J].Journal of Robotics and Mechatronics, 2001, 1:17-22. http://ci.nii.ac.jp/naid/80015453500 [7] 徐淼鑫.气压驱动软体夹持装置研究[D].南京: 南京理工大学, 2015.XU M X.Research on pneumatic driving software clamping device[D].Nanjing: Nanjing University of Science and Technology, 2015(in Chinese). [8] 费燕琼, 庞武, 于文博.气压驱动软体机器人运动研究[J].机械工程学报, 2017, 53(13):14-18.FEI Y Q, PANG W, YU W B.Study on motion of air-driven soft robot[J].Journal of Mechanical Engineering, 2017, 53(13):14-18(in Chinese). [9] DEIMEL R, BROCK O.A novel type of compliant and underactuated robotic hand for dexterous grasping[J].The International Journal of Robotics Research, 2015, 35(1-3):161-185. doi: 10.1177/0278364915592961 [10] HAO Y F, GONG Z, XIE Z, et al.Universal soft pneumatic robotic gripper with variable effective length[C]//Control Conference, 2016: 6109-6114. [11] LIU A J, NAGEL S R.Nonlinear dynamics:Jamming is not just cool any more[J].Nature, 1998, 396(6706):21-22. doi: 10.1038/23819 [12] PEDRO P, ANANDA C, RAFAEL P B, et al.Closed structure soft robotic gripper[C]//IEEE International Conference on Soft Robotics.Piscataway: IEEE Press, 2018: 66-70. [13] WU P C, LIN N, LEI T, et al.A new grasping mode based on a sucked-type underactuated hand[J].Chinese Journal of Mechanical Engineering, 2018, 31(6):25-33. http://d.old.wanfangdata.com.cn/Periodical/jxgcxb-e201806002 [14] ILIEVSKI F, MAZZEO A D, SHEPHERD R F, et al.Soft robotics for chemists[J].Angewandte Chemie, 2011, 123(8):1930-1935. doi: 10.1002/ange.201006464 [15] 王宁扬, 孙昊, 姜皓, 等.一种基于蜂巢气动网络的软体夹持器抓取策略研究[J].机器人, 2016, 38(3):371-384.WANG N Y, SUN H, JIANG H, et al.On grasp strategy of honeycomb pneuNets soft gripper[J].Robot, 2016, 38(3):371-384(in Chinese). [16] 郭钟华, 李小宁, 林浩鹏.基于主动包络和负压塑形的软体适形夹持器[J].机械工程学报, 2019, 4(23):1-7.GUO Z H, LI X N, LIN H P.Soft conformal gripper based on active envelope and negative pressure shaping[J].Journal of Mechanical Engineering, 2019, 4(23):1-7(in Chinese). [17] BROWN E, RODENBER N, AMEND J, et al.Universal robotic gripper based on the jamming of granular material[J].Proceedings of the National Academy of Sciences of the United States of America, 2010, 107(44):18809-18814. doi: 10.1073/pnas.1003250107 [18] LI H, YAO J T, ZHOU P C, et al.High-load soft grippers based on bionic winding effects[J].Soft Robotics, 2019, 6(2):276-288. doi: 10.1089/soro.2018.0024 [19] 顾苏程, 王保兴, 刘俊辰, 等.纤维增强型软体夹持器变形及末端接触力[J].北京航空航天大学学报, 2020, 46(2):447-456. doi: 10.13700/j.bh.1001-5965.2019.0251GU S C, WANG B X, LIU J C, et al.The research on the deformation mechanism and contact force of the fiber-reinforced soft gripper[J].Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(2):447-456(in Chinese). doi: 10.13700/j.bh.1001-5965.2019.0251 [20] TOSHIMICHI B, YOSHIHIDE K, TETSUSHI K, et al.A snake robot propelling inside of a pipe with helical rolling motion[C]//SICE Annual Conference, 2010: 1471-1487. [21] GALLOWAY K C, BECKER K P, PHILLIPS B, et al.Soft robotic grippers for biological sampling on deep reefs[J].Soft Robotics, 2016, 3(1):23-33. doi: 10.1089/soro.2015.0019 [22] CONNOLLY F, POLYGERINOS P, WALSH C J, et al.Mechanical programming of soft actuators by varying fiber angle[J].Soft Robotics, 2015, 2(1):26-32. doi: 10.1089/soro.2015.0001 [23] ELSAYED Y A, LEKAKOU C.Finite element analysis mad design optimization of a pneumatically actuating silicone module for robotic surgery applications[J].Soft Robotics, 2014, 1(4):255-262. doi: 10.1089/soro.2014.0016 [24] 黄建龙, 解广娟, 刘正伟.基于Mooney-Rivlin模型和Yeoh模型的超弹性橡胶材料有限元分析[J].橡胶工业, 2008, 55(8):467-471. doi: 10.3969/j.issn.1000-890X.2008.08.004HUANG J L, XIE G J, LIU Z W.The finite element analysis of super-elastic rubber material based on Mooney-Rivlin model and Yeoh model[J].China Rubber Industry, 2008, 55(8):467-471(in Chinese). doi: 10.3969/j.issn.1000-890X.2008.08.004 -

 下载:
下载:








 点击查看大图
点击查看大图

计量
- 文章访问数: 717
- HTML全文浏览量: 83
- PDF下载量: 233
- 被引次数: 0
