



Aerodynamic and flight dynamic iterative simulation method of a joined wing aircraft
-
摘要:
根据连翼布局飞行器气动力和力矩的分布特点,建立了面向其气动部件的飞行力学数学模型。将计算流体力学(CFD)和飞行力学仿真结合,采用时间步长离散,建立了一个能通过气动计算和飞行力学相互迭代来完成仿真全过程的面向连翼布局飞行器气动部件的仿真平台,并且在仿真过程中能全程监测所有部件的气动、动力学、姿态和航迹参数的变化。通过该仿真平台对不同输入信号作用下的动力学响应分析了连翼布局飞行器纵向和横侧向的动力学特性。仿真分析结果表明:该连翼布局飞行器纵向具备静稳定性,但横侧向不具备静稳定性。同时,横向和航向运动耦合明显,符合荷兰滚运动偏航及侧滑振荡明显的主要特征。所提方法可为了解连翼布局飞行器本体及飞行动力学响应特性、飞行品质和飞行安全研究等工作提供分析基础。
-
关键词:
- 连翼布局飞行器 /
- 计算流体力学(CFD) /
- 飞行动力学 /
- 动力学特性 /
- 仿真平台
Abstract:An aerodynamic component-oriented flight dynamic model of joined wing aircraft was established based on the joined wing aircraft aerodynamic force and moment distribution characteristic, and a simulation platform is established by combining the computational fluid dynamics and flight dynamic simulation method. The entire simulation is spatially discretized with time steps, and is executed by iterating Computational Fluid Dynamics (CFD) calculation along with the above joined wing aircraft flight dynamic model at each time step. Moreover, the platform is able to output the change of variables of interest, such as aerodynamics, mechanics, attitude and the space track of all components throughout the entire simulation process. Based on the dynamic response of the platform to different input signals, the longitudinal and lateral dynamic characteristics of the joined wing aircraft are analyzed. The simulation results show that the joined wing aircraft is longitudinally stable, but is not laterally stable. Lateral and directional motion couple clearly, and the yaw and side slip motion oscillations are in line with the main characteristics of the Dutch roll. The developed platform can provide a useful guideline for investigating the ontology system model, flight quality, flight safety analysis and flight dynamic response characteristics of the joined wing aircraft.
-
盒式机翼、菱形翼、支撑翼和普朗特构型等都属于连翼布局的范畴[1]。其不同于常规布局的气动力和力矩分布,前后翼之间的气动干扰和机翼系统结构应力分布等特点大大增加了其应用研究的难度。但是,连翼布局独特的气动和结构优势也能为飞机设计师针对特定的飞行任务提供更大的设计空间,因此,吸引了世界各国学者对其进行研究。
以往关于连翼布局飞行器的研究课题主要涉及其气动[2-5]、结构[6-7]、气动弹性[8-9]及多学科优化[10-11]等方面,而对连翼布局飞行力学相关内容关注较少。目前国内外已有的涉及连翼布局飞行力学的研究主要集中在连翼布局稳定性、操纵性和飞行品质等方面。文献[12]通过涡格法计算了盒式布局的气动力和力矩,并研究了盒式机翼布局纵向及横侧向的稳定性,根据MIL-8785C军用飞行品质规范对其飞行品质进行了评估,结果表明,在大多数飞行状态下盒式布局能达到一级飞行品质,但当飞行高度较大时飞行品质等级下降。文献[13]建立了一个重点考虑机翼相对面积、前后翼衔接点和重心位置的连翼模型,用以研究机翼几何形状对飞机稳定性的影响,结果表明,减小前翼面积或者将重心调整到前翼气动中心前面能获得满意的稳定性,增加前后翼之间的距离会降低稳定性。文献[14]研究了盒式布局飞机的纵向飞行品质,并与具有相同机身和相同机翼面积的常规布局飞机的纵向稳定性进行了比较,发现若将重心位置往后调整减小稳定裕度可以获得和常规布局类似的纵向动力学特性,同时,稳定裕度可以作为连翼布局纵向动力学特性的评价参数之一。文献[15]采用准定常假设建立一个纵向和横侧向解耦的普朗特构型刚体飞行动力学数学模型,并通过其动力学响应来研究其稳定性、操纵性和飞行品质,结果表明,纵向和横侧向动力学响应能满足操纵性要求,而且普朗特构型还能在不降低飞行品质等级和稳定性的前提下进一步降低稳定裕度。
但连翼布局飞行力学仿真研究中仍然存在以下几个问题:①连翼布局飞行力学仿真目前均采用常规布局飞行器动力学方程组[16],没有针对连翼布局气动力和力矩分布特点建立动力学模型。②目前的仿真方法对不同飞行状态下的气动力和力矩描述一般有2个方法。其一,采用气动导数方法,而气动导数往往只对初始飞行状态邻域范围有效,在仿真过程中某些参数可能超出此范围;其二,采用气动数据库来描述飞行状态变化时气动力和力矩的变化,而气动数据库主要考虑速度和迎角2个参数,飞行高度、温度和密度等参数的变化往往被忽略。而且,在飞行器设计的初期,面对的工作任务往往需要通过动力学仿真了解设计方案的某些飞行性能参数,而在此阶段一般没有完整的气动导数或者气动数据库支持。③考虑飞行器的动态变化时主要采用动导数来描述,先不讨论动导数的高阶项是否被忽略,在计算动导数时无论是采用计算流体力学(CFD)方法还是风洞试验,都必须控制飞机模型运动,但这种运动往往是给定方式的平动或转动,而真实飞行过程中,飞机的运动参数决定下一时刻的气动参数,气动参数又决定接下来的运动参数,这是一个运动参数和气动参数相互迭代的过程。
针对以上问题,在考虑复杂气动布局飞行器的飞行力学仿真中,CFD方法能根据运动参数计算当前的气动参数,但运动方式必须给定;而飞行力学能根据当前气动参数计算运动参数,但气动参数必须给定。因此,本文将CFD计算和飞行力学仿真相结合,通过时间步长离散动力学方程组,在没有气动导数或气动数据库支持下,建立了一个能通过气动计算和飞行力学仿真相互迭代来完成飞行动力学仿真全过程的、面向飞行器气动部件的仿真平台,并且在迭代过程中能全程监测所有部件的气动、动力学、姿态和航迹等参数的变化。
1. 连翼布局飞行力学方程
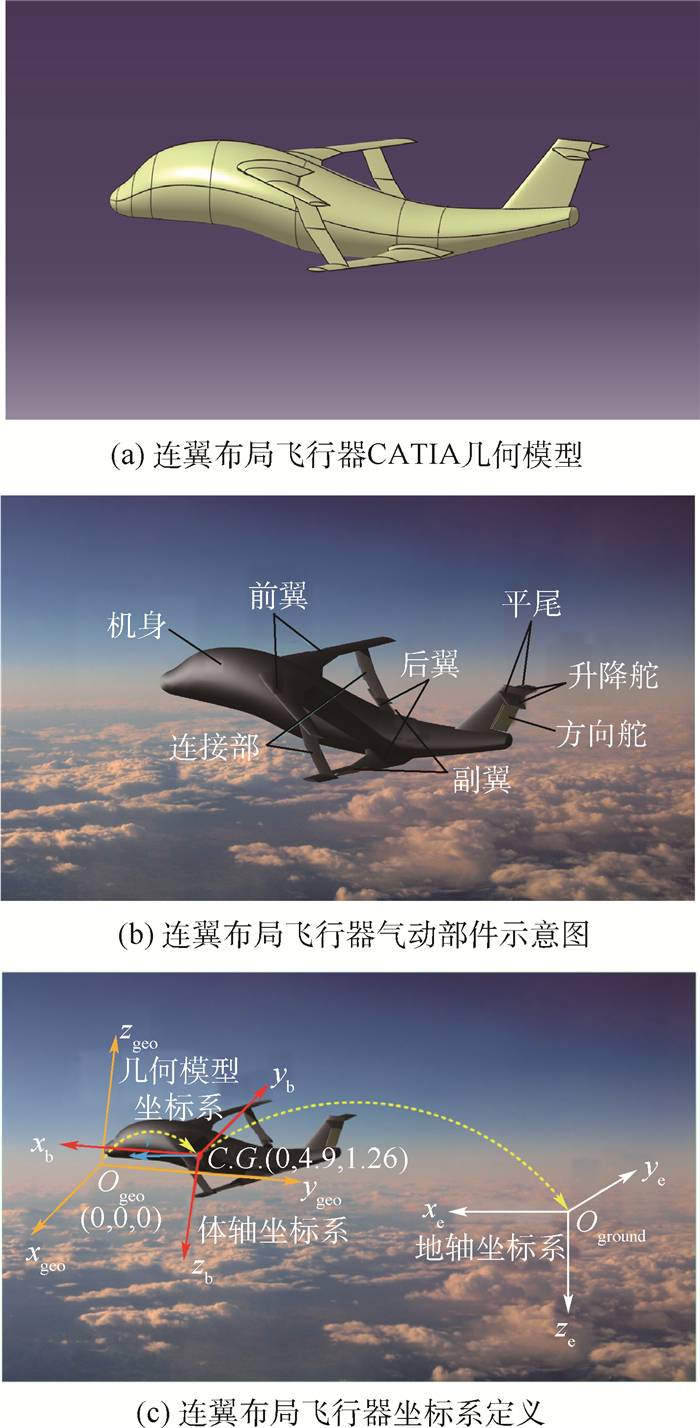
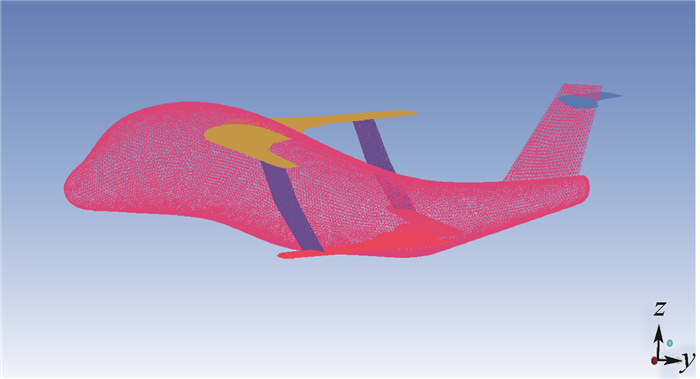
本文建立的飞行力学方程组面向连翼布局飞行器的气动部件,因此,给出连翼布局飞行器的CATIA几何模型,如图 1(a)所示。通过渲染给出的各个气动部件如图 1(b)所示。同时,根据其初始飞行状态,给定初始参数,主要包括飞行空速、迎角、侧滑角、航迹倾角和高度,动力学方程组推导用到的连翼布局飞行器坐标系如图 1(c)所示。
 图 1 连翼布局飞行器几何模型及坐标系定义Figure 1. Joined wing aircraft's geometry model and coordinate system definition
图 1 连翼布局飞行器几何模型及坐标系定义Figure 1. Joined wing aircraft's geometry model and coordinate system definition在体轴坐标系下建立飞机的动力学方程组,因此,必须将气动力从风轴坐标系投影到体轴坐标系。根据坐标系旋转定义,并考虑到便于CFD计算,气动力和力矩从风轴坐标系转换到几何模型坐标系的转换矩阵为

(1) 式中: Tx、Tz分别为绕x轴、z轴的旋转矩阵; Tgw为风轴坐标系到几何模型坐标系的旋转矩阵; α为迎角; β为侧滑角。
由于以上给出的飞机几何模型坐标系不和飞行力学体轴坐标系重合,升力、阻力和侧力在以上几何模型坐标系下的方向定义如下:

(2) 滚转力矩、俯仰力矩和偏航力矩方向在几何模型坐标系下定义分别为y轴、x轴和z轴的负方向。在推导动力学方程组时全部按照飞行力学坐标系定义惯例。同时,CFD计算中来流速度方向定义如下:

(3) 根据飞行力学惯例,在体轴坐标系下机体所受的合外力和力矩可以表示为

(4) 式中:

(5) 其中:u、v和w分别为空速在体轴坐标系xb、yb和zb方向的投影;m为飞机质量; t为时间; p、q和r分别为滚转角速度、俯仰角速度和偏航角速度;Ix、Iy、Iz和Ixz分别为飞机转动惯量和惯性积。将发动机推力T和重力投影到体轴坐标系,并展开式(4),得到

(6) 式中:XD、YC和ZL分别为阻力、侧力和升力;Lroll、M和N分别为滚转力矩、俯仰力矩和偏航力矩;φT为推力角;φ、θ和ψ分别为滚转角、俯仰角和偏航角;zT为推力偏心距;g为重力加速度。将连翼布局飞行器气动力和力矩分解到各个气动部件,可得

(7) 式中:下标fw为前翼的缩写;下标r为方向舵的缩写。为了描述式(7)中各个部件的气动力和力矩方便,取

(8) 式中:i代表阻力、侧力和升力; k代表滚转力矩、俯仰力矩和偏航力矩;j=fw, rw, jp, tail, b, δe, δw, δr代表前翼、平尾、连接部、尾翼、机身、升降舵、副翼和方向舵;ρ为密度; V为飞行空速; S和cA分别为各个气动部件参考面积和平均气动弦长。计算气动力和力矩时,各个部件参考面积和平均气动弦长均取1个单位,因此,只需将导出的参数乘以动压就可以得到气动力和力矩。之后将给定的边界条件代入Fluent求解,得到3 000 m高度定直平飞初始状态下飞机各个部件的气动力和力矩,再对飞机初始飞行状态进行配平。配平后各个飞行力学参数和配平误差参数如表 1所示。表中:u、γ、χ分别为速度滚转角、航迹倾角、航迹偏角;ue、ve、we为空速矢量在地轴坐标系三轴的投影;Xe、Ye、Ze为地轴坐标系下三轴的坐标位置;Err_i(i=D、C、L、Lroll、M、N)为各个方向方程的配平误差,各个参数的单位均采用国际单位制。之后将以上参数作为边界条件代入迭代过程进行仿真。
表 1 定直平飞配平初始状态参数初值Table 1. Trimmed parameter values of straightforward and level flight initial condition参数 数值 α 0.0780802 β 0 u 98.345454 v 0 w 7.6944834 p 0 q 0 r 0 φ 0.001084 θ 0.078080 ψ 0 μ 0.001081 γ 0 χ 9.927×10-4 ue 98.64595 ve 0.097925 we 0 Xe 0 Ye 0 Ze 3000.0 m 6942.922 δe 0.220958 δT 0.400235 δa 6.5767×10-4 δr -0.001217 Err_D -9.0949×10-13 Err_C 1.56319×10-13 Err_L 4.77485×10-13 Err_Lroll -8.8818×10-16 Err_M 6.82121×10-13 Err_N 0 2. 迭代流程及算法
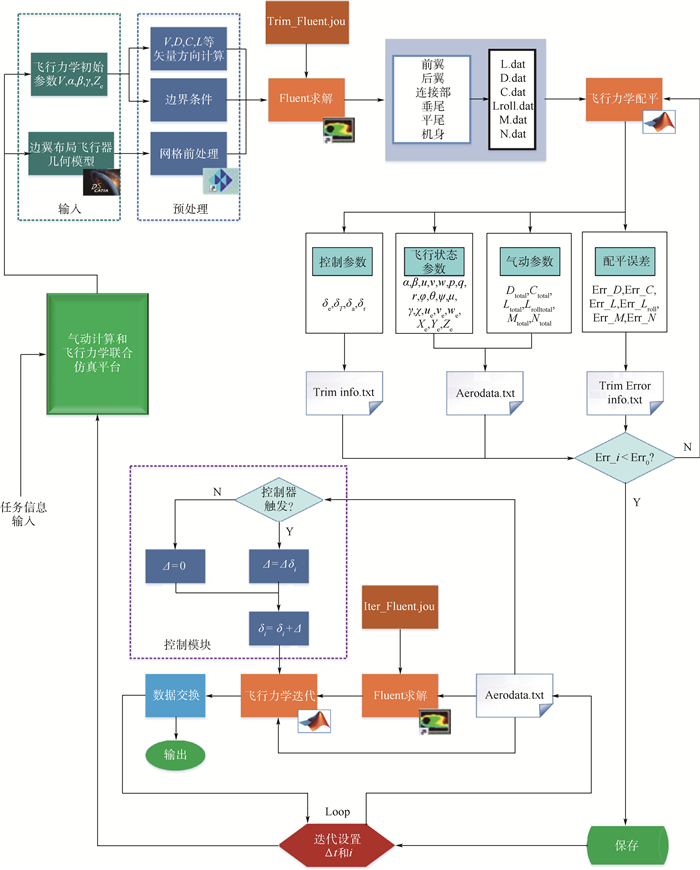
在气动计算和飞行力学的相互迭代过程中,采用时间步长Δt离散飞行力学方程组,并将表 1中边界条件作为各个参数初始状态开始迭代,迭代流程逻辑如图 2所示。对于第i时间步来说,采用CFD数值模拟计算求解此时刻连翼布局飞行器的气动力和力矩,再代入离散飞行力学方程组,计算第i+1时间步的各个飞行力学状态参数,如此循环直至设定的飞行力学仿真总时长。
 图 2 连翼布局飞行器气动计算和飞行力学仿真平台流程Figure 2. Flowchart of aerodynamic calculation and flight dynamic simulation platform for joined wing aircraft
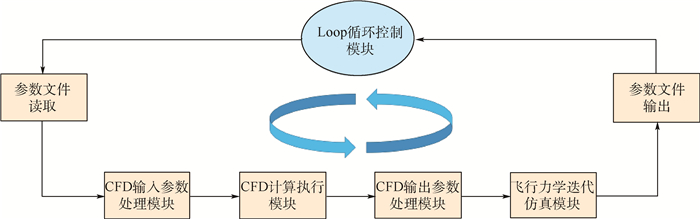
图 2 连翼布局飞行器气动计算和飞行力学仿真平台流程Figure 2. Flowchart of aerodynamic calculation and flight dynamic simulation platform for joined wing aircraft图 3为连翼布局飞行器气动计算和飞行力学联合仿真流程,其数据输入为初始状态配平模块输出的配平参数,循环结束则向上级模块提交数据流。Loop循环控制模块包含2个数据交换模块、2个计算模块、1个CFD求解模块和1个飞行力学迭代仿真模块。参数文件读取模块和参数文件输出模块分别用于读写参数文件。CFD输入参数处理模块用于预处理CFD求解输入变量,如空速单位矢量方向、大气密度和动压等。CFD输出参数处理模块用于后处理CFD计算数据,导出各个方向的气动力和力矩,作为仿真模块的预处理输入。在以上迭代过程中,考虑到时间步长较小,飞行力学方程组在第i时间步到第i+1时间步的离散如式(9)~式(11)所示。

(9)  图 3 连翼布局飞行器气动计算和飞行力学联合仿真流程Figure 3. Joined wing aircraft's aerodynamic calculation and flight dynamic integrated simulation process
图 3 连翼布局飞行器气动计算和飞行力学联合仿真流程Figure 3. Joined wing aircraft's aerodynamic calculation and flight dynamic integrated simulation process式中:Ixzi为当前时间步关于飞机体轴坐标系xoz面的惯性积;Ixi、Iyi、Izi分别为绕体轴坐标系xb轴惯性矩、绕飞机体轴坐标系yb轴惯性矩、zb轴惯性矩;δT为油门开度; f(xi+1, xi, Δt)可以根据所需精度要求选择不同阶数的显式或隐式离散算法。若采用CFD方法实时在线计算气动舵面变化时的气动力和力矩,必须实时更新几何模型和计算域网格,计算资源要求及时间成本将急剧增大。因此本文中各个舵面的气动力和力矩仍然采用CFD方法进行离线计算,并考虑了纵向舵面对横侧向气动参数的影响和横侧向舵面对纵向气动参数的影响。操纵舵面的气动力和力矩计算方法如式(10)所示,i取δe、δa和δr。各个气动部件气动力和力矩采用操纵导数方法表示如式(8),参考面积和平均气动弦长均取1个单位。升降舵偏转联动,副翼偏转反向联动。气动舵面偏转对各个部件的影响如表 2~表 4所示,表中:Cd、Cc、CL、CLroll、Cm和Cn分别为阻力系数、侧力系数、开力系数、滚转力矩系数、俯仰力矩系数和偏航力矩系数。其中,升降舵偏转不破坏连翼布局飞行器的对称性,因此对各个气动部件横侧向的气动力和力矩的影响非常小。

(10) 表 2 升降舵偏转对连翼布局飞行器各个气动部件的影响Table 2. Elevator deflection effects on joined wing aircraft's aerodynamic components气动部件 Cd Cc CL CLroll Cm Cn 前翼 0.0037 0 0.0173 0 0.0159 0 后翼 0.0025 0 0.0429 0 -0.0354 0 连接部 0.00001 0 0 0 0.00001 0 尾翼 0.4169 0 1.2078 0 -8.0913 0 机身 0.0574 0 0.0578 0 0.1087 0 表 3 副翼偏转对连翼布局飞行器各个气动部件的影响Table 3. Aileron deflection effects on joined wing aircraft's aerodynamic components气动部件 Cd Cc CL CLroll Cm Cn 前翼 0.0018 0.0054 -0.0014 -0.4208 0.0062 -0.0109 后翼 0.5108 0.0451 -0.0252 -6.4906 0.0377 0.308 连接部 0.0004 -0.0338 -0.0003 0.0001 0.0008 0.0596 尾翼 0.0001 0.0005 -0.0035 0.012 0.0212 -0.0034 机身 0.0032 0.1007 0.0186 -0.024 -0.0982 -0.3187 表 4 方向舵偏转对连翼布局飞行器各个气动部件的影响Table 4. Rudder deflection effects on joined wing aircraft's aerodynamic components气动部件 Cd Cc CL CLroll Cm Cn 前翼 0.0013 0.0011 0.0039 -0.0059 0.0039 -0.0026 后翼 0.0005 0.0029 0.0144 -0.0043 -0.0294 -0.0007 连接部 0.0003 0.0012 -0.0002 0.0006 0.0007 -0.0016 尾翼 0.1962 0.0058 0.0118 0.3097 -0.068 -0.0348 机身 0.0838 0.6954 0.0238 0.4123 -0.0071 -6.6195 式中:等号右边的系数均为各个气动部件气动力和力矩的小导数。
之后对i+1时间步连翼布局飞行器的质量、姿态和位置参数进行更新。


(11) 式中:γ为航迹倾角;μ为航迹滚转角;χ为航迹偏航角;ue为地轴坐标系xe轴向分量;ve为地轴坐标系ye轴向分量;we为地轴坐标系ze轴向分量;(xe, ye, ze)为飞机空间坐标;ηfuel为燃油效率。以此,更新完所有运动参数后,完成了第i时间步到i+1时间步的迭代。
3. 气动计算方法及验证
在第2节迭代流程中,由于要考虑横侧向的非对称运动,迭代过程中的气动计算模型必须采用全模型。计算域坐标原点固定于飞机几何模型坐标系原点,计算域采用球域,半径为前翼展长20倍,采用非结构网格填充整个计算域。飞机全模壳网格如图 4所示,边界条件如表 5所示。由于设定时间步长较小,考虑准定常假设。采用Fluent进行求解,湍流模型采用航空外流场计算常用的对受到逆压梯度作用下的边界层模拟效果较好的Spalart-Allmaras模型,求解算法采用Simple算法。计算入口边界条件采用压力远场,采用二阶迎风格式对控制方程进行离散推进。监测前后翼上下表面压力平均值是否稳定,作为收敛判定条件。连翼布局飞行器各个气动部件分解如图 1(b)所示,各个气动部件的气动力和力矩在CFD计算中通过对各个部件单独积分的方法提取。
表 5 定直平飞初始边界条件Table 5. Straightforward and level flight initial boundary conditions参数 数值 迎角/(°) 4.474 来流速度/(m·s-1) 98.646 温度/K 268.7 高度/m 3 000 大气密度/(kg·m-3) 0.909 3 气动计算验证主要包括网格独立性验证和计算结果准确性验证。图 5(a)为连翼布局飞行器在初始定直平飞状态下(配平空速V0=98.646 m/s, α=4.474°)各个部件气动参数随网格数量增加的变化情况。可以看到,当网格数量达到4 302 857时,连翼布局飞行器各个部件气动参数基本不随网格数量变化而变化,因此计算结果的网格独立性得到验证。图 5(b)为NASA关于GAW-1翼型段的风洞试验结果(Re=6.3×106)和CFD数值模拟计算结果(Re=6.6×106)对比[17]。可以看出,CFD数值模拟计算得到的升力系数曲线、极曲线和NASA风洞试验结果基本吻合,因此验证了CFD计算结果的准确性。
 图 5 连翼布局飞行器气动计算验证性算例Figure 5. Joined wing aircraft aerodynamic calculation verification cases
图 5 连翼布局飞行器气动计算验证性算例Figure 5. Joined wing aircraft aerodynamic calculation verification cases4. 仿真结果及讨论
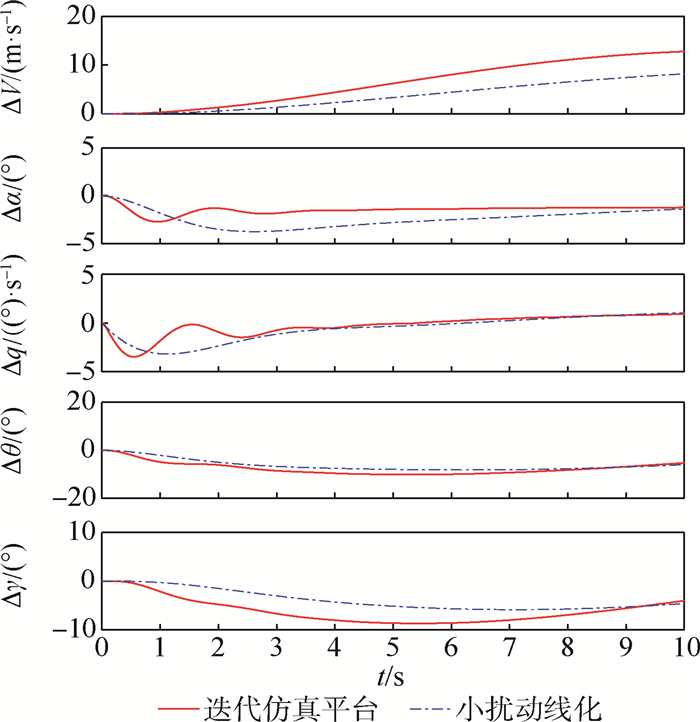
仿真结果通过将连翼布局飞行器几何模型和初始定直平飞边界条件代入以上气动计算和飞行力学联合迭代仿真平台进行说明。首先,需要对仿真结果进行验证。因此,建立基于此定直平飞初始状态下的小扰动线化模型,将升降舵阶跃信号输入下的仿真结果与迭代仿真平台在同样的初始状态和输入信号下的动力学响应进行比较。图 6为升降舵增量为5°阶跃输入信号下2种仿真方法的动力学响应随时间的变化情况。其中,迭代仿真平台Δt=0.01 s,迭代1 000步,总仿真时长为10 s。可以看出,迭代仿真平台和小扰动线性化方法仿真结果虽然存在差异,但基本能捕获连翼布局飞行器在阶跃信号输入下的动力学行为。从图 6中可以看出,俯仰角速度和俯仰角的吻合度最好,同时,从文献[18]中对线性小扰动和非线性仿真结果的验证性分析中也可以得到同样的结论。因此,可以认为迭代仿真平台的仿真结果具备参考价值。
 图 6 升降舵阶跃信号输入下的迭代仿真平台和小扰动线性化动力学响应对比Figure 6. Comparison of dynamic responses of iterative simulation platform and small disturbance linearization with elevator step signal input
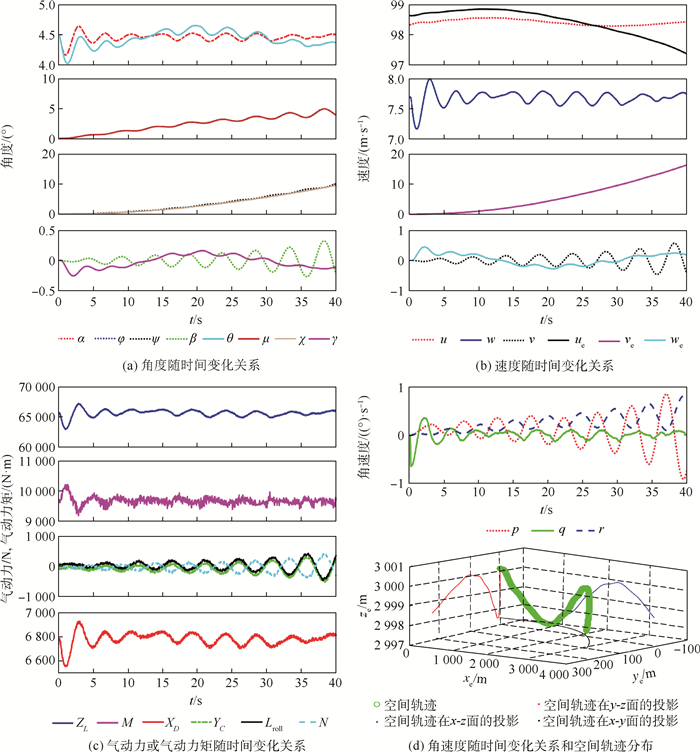
图 6 升降舵阶跃信号输入下的迭代仿真平台和小扰动线性化动力学响应对比Figure 6. Comparison of dynamic responses of iterative simulation platform and small disturbance linearization with elevator step signal input考虑到各个参数变化的幅度量级各不相同,为了能观察到迭代仿真过程中各个飞行力学参数的变化,仿真结果曲线按照各个参数的变化幅度范围进行排列。图 7、图 8和图 9分别为仿真平台在无输入信号、升降舵脉冲输入信号和升降舵阶跃输入信号下的动力学响应,仿真步数均为1 000步。可以看出:
 图 7 迭代仿真平台无输入信号时的动力学响应Figure 7. Dynamic response of iterative simulation platform without input signal
图 7 迭代仿真平台无输入信号时的动力学响应Figure 7. Dynamic response of iterative simulation platform without input signal 图 8 迭代仿真平台升降舵脉冲信号输入时的动力学响应Figure 8. Dynamic response of iterative simulation platform with elevator pulse signal input
图 8 迭代仿真平台升降舵脉冲信号输入时的动力学响应Figure 8. Dynamic response of iterative simulation platform with elevator pulse signal input 图 9 迭代仿真平台升降舵阶跃信号输入时的动力学响应Figure 9. Dynamic response of iterative simulation platform with elevator step signal input
图 9 迭代仿真平台升降舵阶跃信号输入时的动力学响应Figure 9. Dynamic response of iterative simulation platform with elevator step signal input1) 无信号输入时,u基本不变,迎角在初始值附近波动;w、升力和阻力随迎角同步变化,v随侧滑角同步变化。由于初始状态为定直平飞,无信号输入时,滚转角和速度滚转角基本一致,偏航角和航迹偏航角的区别也很小,但均单调增加。俯仰力矩最为稳定,侧力、滚转力矩和偏航力矩变化较小,俯仰角速度在初始值0附近波动,滚转角速度和偏航角速度缓慢增加。空间轨迹z向变化较小,但空间轨迹在16 s内出现了将近8 m的航迹偏差,如图 7所示。
2) 升降舵脉冲信号输入(Δδe=5°)时,迎角、侧滑角、力和力矩均开始振荡,但随着时间变化,迎角、升力、阻力、俯仰力矩和俯仰角速度等纵向参数振荡幅度不随时间增大而发散,俯仰力矩收敛最稳定;侧滑角、侧力、滚转力矩、偏航力矩、滚转角速度和偏航角速度随时间增加而振荡发散,且侧力和滚转力矩振荡相位基本相同,偏航力矩和滚转力矩振荡相位相差180°,横向和航向运动耦合明显,符合荷兰滚运动偏航及侧滑振荡明显的主要特征。滚转角和速度滚转角基本一致,偏航角和航迹偏航角的区别也很小。升降舵脉冲输入对连翼布局飞行器动能和势能分配的改变较小,因此航迹出现波动但高度变化较小,同时,地速侧向分量变化较大,40 s仿真时间内航迹航向出现了超过200 m的偏差,如图 8所示。3) 升降舵阶跃信号输入(Δδe=5°)时,u、升力和阻力明显增大,纵向参数变化明显。w、升力和阻力随迎角同步变化,v随侧滑角同步变化,在初始值附近波动。侧力、滚转力矩和偏航力矩在初始值附近波动但缓慢增大,滚转角速度和偏航角速度缓慢增加,俯仰角速度出现明显振荡,但随后有收敛趋势。由于升降舵阶跃信号输入使飞机低头,飞机高度下降,显著地改变了连翼布局飞行器动能和势能的分配,地速铅锤分量明显增大,在20 s时间内高度降低了超过200 m,航迹航向出现了将近30 m的偏差,如图 9所示。
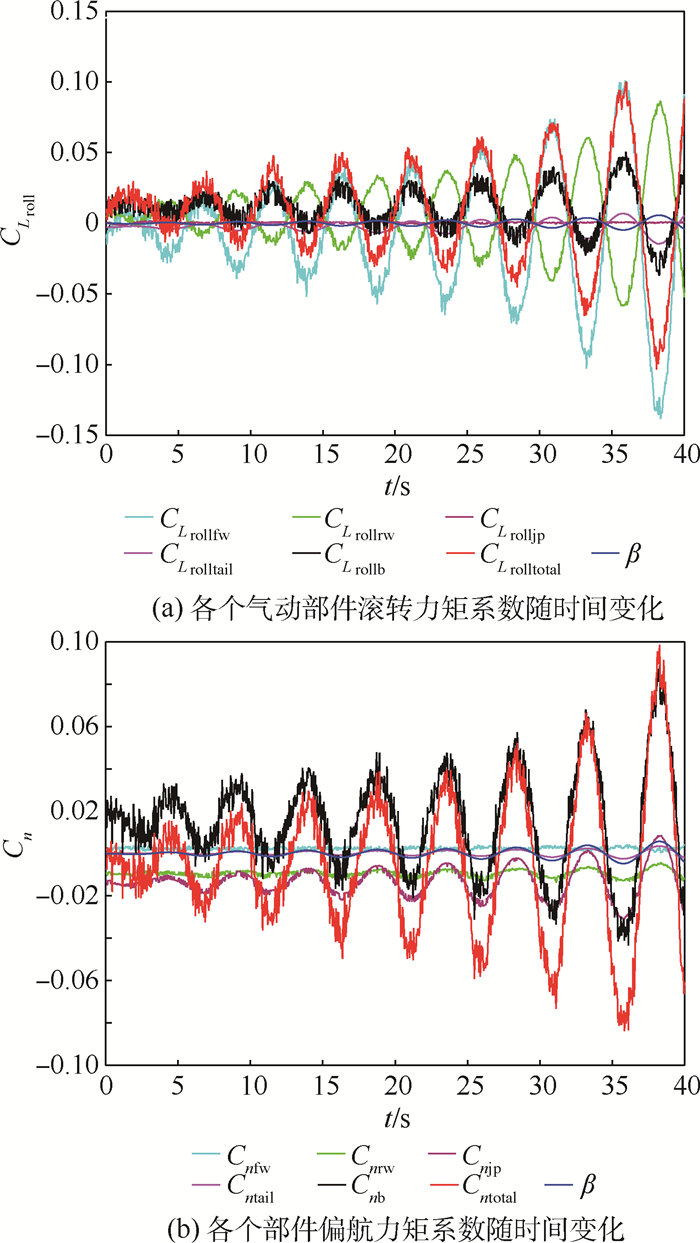
从以上不同的升降舵信号输入动力学响应可以看出,此连翼布局飞行器纵向具备静稳定性,与小扰动线性化后纵向运动的系统矩阵特征值(-0.774 4±1.120i;-0.023 0±0.229 2i)对纵向静稳定性的判断一致,特别是俯仰力矩和俯仰角速度收敛较为稳定。以上仿真结果中均出现了航向航迹偏差,这是由于横侧向运动不具备静稳定性,进而导致了横侧向运动发散,必须对横侧向运动进行稳定增稳设计。图 10为升降舵脉冲输入下连翼布局飞行器各个气动部件横侧向力矩系数随时间的变化关系,蓝色表示侧滑角随时间的变化关系。对于滚转力矩系数来说,只有后翼和侧滑角振荡相位相同,而其余部件振荡相位均与侧滑角振荡相位相反。一般情况下,不带反角的下单翼布局和机身的气动干扰产生的滚转力矩会进一步扩大滚转效果而引起横向静不稳定性。但是,从图 10(a)中可以看出,引发全机横向运动静不稳定现象的原因并非后翼产生的横向静不稳定力矩,而是前翼和机身产生的对抗全机滚转运动的力矩过大。对于航向运动来说,从图 10(b)中可知,前翼影响较小,其余部件偏航力矩系数和侧滑角振荡相位相同,各个气动部件的偏航力矩均扩大了航向静不稳定效果,特别是机身和连接部起到了主导作用。由于横侧向运动发散,横侧向操纵舵面无论是脉冲还是阶跃信号输入各个参数均很快发散,采用升降舵信号输入来对动力学响应过程进行说明。同时,舵面变化的动力学响应都符合预期,可以认为搭建的连翼布局飞行器气动计算和飞行力学联合仿真平台能实现在此定直平飞初始状态下的动力学仿真。
 图 10 升降舵脉冲输入下连翼布局飞行器各个气动部件横侧向力矩系数随时间的变化关系(S=1 m2, cA=1 m)Figure 10. Time history of joined wing aircraft's aerodynamic component lateral moment coefficients under elevator pulse input (S=1 m2, cA=1 m)
图 10 升降舵脉冲输入下连翼布局飞行器各个气动部件横侧向力矩系数随时间的变化关系(S=1 m2, cA=1 m)Figure 10. Time history of joined wing aircraft's aerodynamic component lateral moment coefficients under elevator pulse input (S=1 m2, cA=1 m)另外,由于迭代仿真平台的控制模块目前尚未设计,进行动力学仿真时采用开环脉冲和阶跃信号输入进行代替,因此,未来将根据任务要求对控制模块进行设计。同时,因为本文仿真平台无需气动导数或气动数据库支持而采用CFD方法对气动力和力矩进行实时在线求解,计算量非常大,对计算资源要求较高,仿真时间总长受限制,必须选择合适的时间步长和仿真时间总长。若以后计算资源允许的情况下,气动舵面对连翼布局飞行器各个气动部件的影响也应采取在线计算的方法并入联合仿真平台。还必须注意到,对于同一个仿真时间总长,若时间步长太小,则迭代步数增加,CFD计算误差的累积将增大;若时间步长太大,则无法提供足够的分辨率捕捉飞机的动力学行为,因此,还必须对仿真时间步长进行研究。
5. 结论
1) 根据连翼布局气动力和力矩分布特点,建立了面向气动部件的连翼布局飞行器六自由度非线性刚体动力学模型,并且通过时间步长离散,建立了一种气动计算和飞行力学循环迭代的、除操纵导数以外无需气动导数或者气动数据库支持的、能监测飞机所有部件气动参数变化的仿真方法,并且通过和小扰动线性化仿真结果对比,验证了仿真方法的有效性。
2) 分析结果表明,连翼布局飞行器纵向具备静稳定性,与小扰动线性化分析结果一致;横侧向不具备静稳定性,导致了仿真过程中空间轨迹出现航向偏差,需要进行稳定增稳设计。
3) 连翼布局飞行器在不同升降舵信号输入时俯仰力矩和俯仰角速度收敛性较好,升降舵脉冲信号输入时侧力和滚转力矩振荡相位相同,滚转力矩和偏航力矩振荡相位相反,横向和航向运动耦合明显,符合荷兰滚运动偏航及侧滑振荡明显的主要特征。
4) 引发全机横向静不稳定现象的原因并非后翼主导的与侧滑角振荡相位相同的滚转力矩,而是前翼和机身产生的对抗侧滑效果的横向力矩过大。而航向运动方面,前翼影响较小,机身和连接部产生的偏航力矩主导了航向运动的静不稳定性。
本文提出的气动计算和飞行力学联合仿真思路能为连翼布局飞行器本体及动力学响应特性、飞行品质和飞行安全分析等工作提供研究基础。
-

图 1 连翼布局飞行器几何模型及坐标系定义
Figure 1. Joined wing aircraft's geometry model and coordinate system definition

图 2 连翼布局飞行器气动计算和飞行力学仿真平台流程
Figure 2. Flowchart of aerodynamic calculation and flight dynamic simulation platform for joined wing aircraft

图 3 连翼布局飞行器气动计算和飞行力学联合仿真流程
Figure 3. Joined wing aircraft's aerodynamic calculation and flight dynamic integrated simulation process

图 5 连翼布局飞行器气动计算验证性算例
Figure 5. Joined wing aircraft aerodynamic calculation verification cases

图 6 升降舵阶跃信号输入下的迭代仿真平台和小扰动线性化动力学响应对比
Figure 6. Comparison of dynamic responses of iterative simulation platform and small disturbance linearization with elevator step signal input
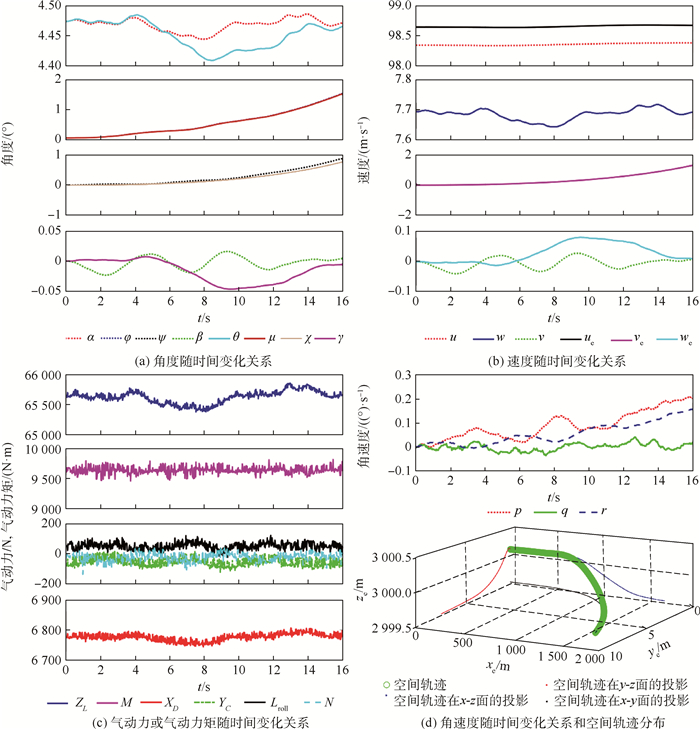
图 7 迭代仿真平台无输入信号时的动力学响应
Figure 7. Dynamic response of iterative simulation platform without input signal
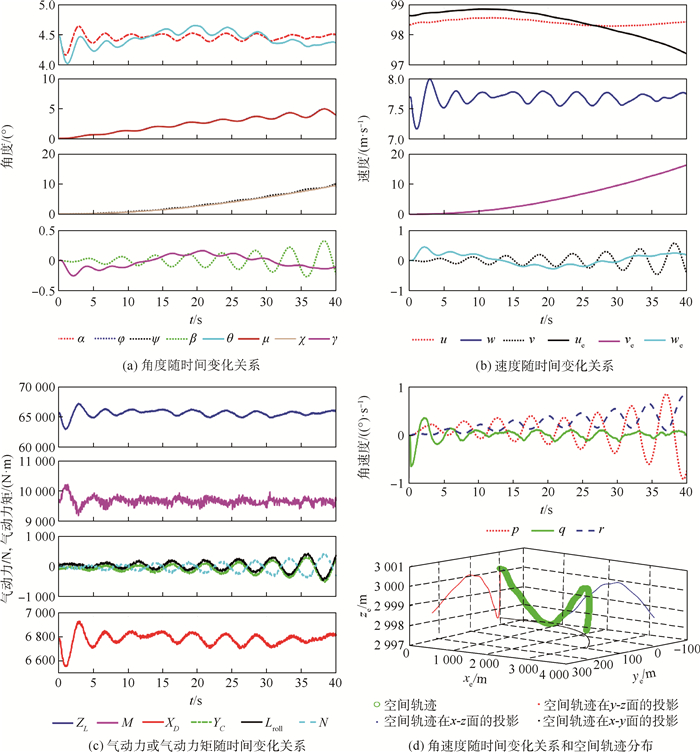
图 8 迭代仿真平台升降舵脉冲信号输入时的动力学响应
Figure 8. Dynamic response of iterative simulation platform with elevator pulse signal input
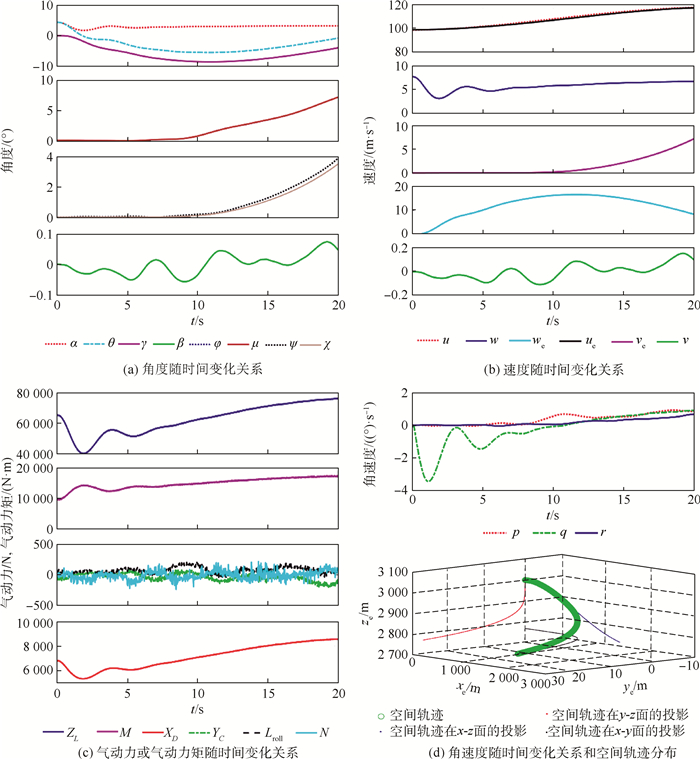
图 9 迭代仿真平台升降舵阶跃信号输入时的动力学响应
Figure 9. Dynamic response of iterative simulation platform with elevator step signal input
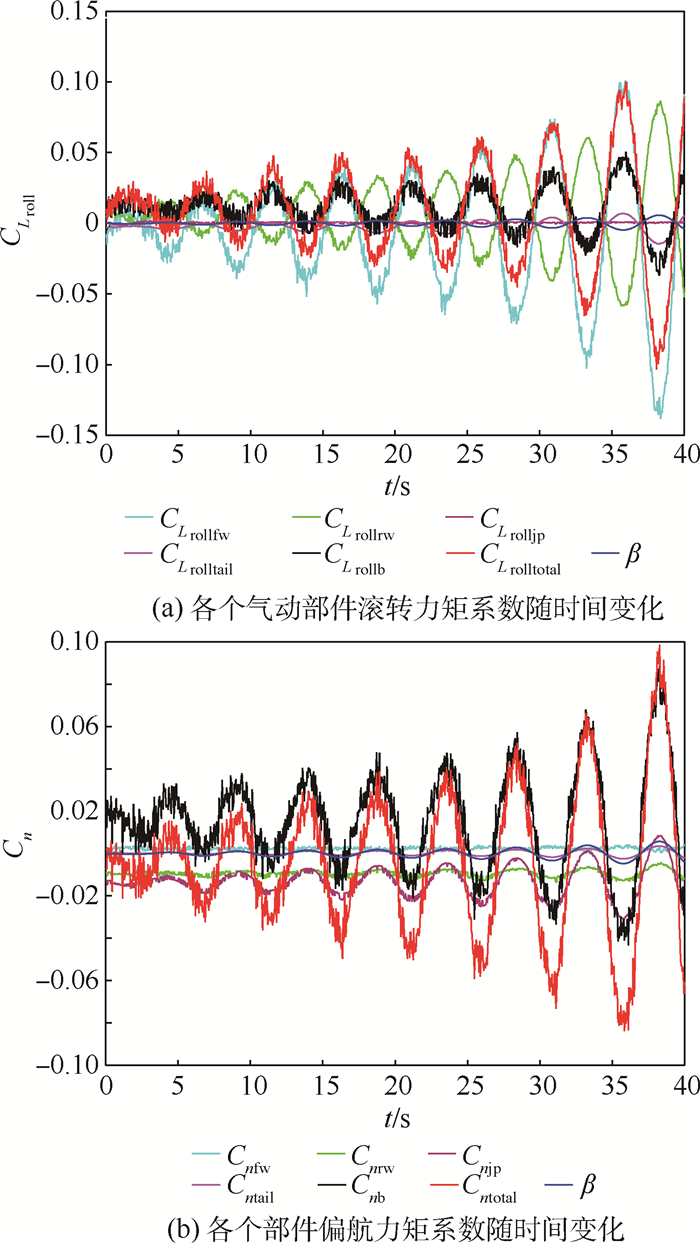
图 10 升降舵脉冲输入下连翼布局飞行器各个气动部件横侧向力矩系数随时间的变化关系(S=1 m2, cA=1 m)
Figure 10. Time history of joined wing aircraft's aerodynamic component lateral moment coefficients under elevator pulse input (S=1 m2, cA=1 m)
表 1 定直平飞配平初始状态参数初值
Table 1. Trimmed parameter values of straightforward and level flight initial condition
参数 数值 α 0.0780802 β 0 u 98.345454 v 0 w 7.6944834 p 0 q 0 r 0 φ 0.001084 θ 0.078080 ψ 0 μ 0.001081 γ 0 χ 9.927×10-4 ue 98.64595 ve 0.097925 we 0 Xe 0 Ye 0 Ze 3000.0 m 6942.922 δe 0.220958 δT 0.400235 δa 6.5767×10-4 δr -0.001217 Err_D -9.0949×10-13 Err_C 1.56319×10-13 Err_L 4.77485×10-13 Err_Lroll -8.8818×10-16 Err_M 6.82121×10-13 Err_N 0  下载: 导出CSV
下载: 导出CSV
表 2 升降舵偏转对连翼布局飞行器各个气动部件的影响
Table 2. Elevator deflection effects on joined wing aircraft's aerodynamic components
气动部件 Cd Cc CL CLroll Cm Cn 前翼 0.0037 0 0.0173 0 0.0159 0 后翼 0.0025 0 0.0429 0 -0.0354 0 连接部 0.00001 0 0 0 0.00001 0 尾翼 0.4169 0 1.2078 0 -8.0913 0 机身 0.0574 0 0.0578 0 0.1087 0
下载: 导出CSV
表 3 副翼偏转对连翼布局飞行器各个气动部件的影响
Table 3. Aileron deflection effects on joined wing aircraft's aerodynamic components
气动部件 Cd Cc CL CLroll Cm Cn 前翼 0.0018 0.0054 -0.0014 -0.4208 0.0062 -0.0109 后翼 0.5108 0.0451 -0.0252 -6.4906 0.0377 0.308 连接部 0.0004 -0.0338 -0.0003 0.0001 0.0008 0.0596 尾翼 0.0001 0.0005 -0.0035 0.012 0.0212 -0.0034 机身 0.0032 0.1007 0.0186 -0.024 -0.0982 -0.3187
下载: 导出CSV
表 4 方向舵偏转对连翼布局飞行器各个气动部件的影响
Table 4. Rudder deflection effects on joined wing aircraft's aerodynamic components
气动部件 Cd Cc CL CLroll Cm Cn 前翼 0.0013 0.0011 0.0039 -0.0059 0.0039 -0.0026 后翼 0.0005 0.0029 0.0144 -0.0043 -0.0294 -0.0007 连接部 0.0003 0.0012 -0.0002 0.0006 0.0007 -0.0016 尾翼 0.1962 0.0058 0.0118 0.3097 -0.068 -0.0348 机身 0.0838 0.6954 0.0238 0.4123 -0.0071 -6.6195
下载: 导出CSV
表 5 定直平飞初始边界条件
Table 5. Straightforward and level flight initial boundary conditions
参数 数值 迎角/(°) 4.474 来流速度/(m·s-1) 98.646 温度/K 268.7 高度/m 3 000 大气密度/(kg·m-3) 0.909 3
下载: 导出CSV
-
[1] CAVALLARO R, DEMASI L. Challenges, ideas, and innovations of joined-wing configurations: A concept from the past, an opportunity for the future[J]. Progress in Aerospace Science, 2016(87): 1-93. [2] 王延奎, 单继祥, 田伟, 等. 联翼布局俯仰力矩非线性变化特性的数值模拟[J]. 北京航空航天大学学报, 2012, 38(7): 862-866. https://bhxb.buaa.edu.cn/CN/abstract/abstract12326.shtmlWANG Y K, SHAN J X, TIAN W, et al. Investigation on non-linear characteristic of pitching moment of joined wing configuration aircraft[J]. Journal of Beijing University of Aeronautics and Astronautics, 2012, 38(7): 862-866(in Chinese). https://bhxb.buaa.edu.cn/CN/abstract/abstract12326.shtml [3] SUN J, WANG H, ZHOU Z, et al. Aerodynamic numerical analysis of the low Reynolds number diamond joined-wing configuration unmanned aerial vehicle[J]. International Journal of Aeronautical and Space Sciences, 2018, 19: 544-562. doi: 10.1007/s42405-018-0072-9 [4] 孙俊磊, 王和平, 周洲, 等. 菱形连翼布局俯仰力矩非线性特性数值分析[J]. 北京航空航天大学学报, 2017, 43(8): 1567-1576. doi: 10.13700/j.bh.1001-5965.2016.0584SUN J L, WANG H P, ZHOU Z, et al. Numerical analysis of pitching moment non-linear characteristics of diamond joined-wing configuration[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(8): 1567-1576(in Chinese). doi: 10.13700/j.bh.1001-5965.2016.0584 [5] 楚亮, 马东立, 张朔, 等. 一种联结翼布局气动特性的求解模型[J]. 航空学报, 2010, 31(5): 909-913.CHU L, MA D L, ZHANG S, et al. Solution model for aerodynamic characteristics of joined wing configuration[J]. Acta Aeronautica et Astronautica Sinica, 2010, 31(5): 909-913(in Chinese). [6] GALLMAN J W, KROOI M. Structural optimization for joined-wing synthesis[J]. Journal of Aircraft, 1996, 33(1): 214-223. doi: 10.2514/3.46924 [7] ROBERTS R, CANFIELD R. Sensor-craft structural optimization and analytical certification[C]//Proceedings of the 44th AIAA Structures, Structural Dynamics, and Materials Conference. Reston: AIAA, 2003: 1458. [8] 张波成, 万志强, 杨超. 连翼布局飞行器飞行载荷与颤振分析[J]. 工程力学, 2010, 27(8): 229-233.ZHANG B C, WAN Z Q, YANG C. Flight loads and flutter analysis of the joined wing aircraft[J]. Engineering Mechanics, 2010, 27(8): 229-233(in Chinese). [9] BOND V L, CANFIELD R A, SULEMAN A, et al. Aeroelastic scaling of a joined wing for nonlinear geometric stiffness[J]. AIAA Journal, 2012, 50(3): 513-522. doi: 10.2514/1.41139 [10] KIM Y I, PARK G J, KOLONAY R M, et al. Nonlinear response structural optimization of a joined wing using equivalent loads[J]. AIAA Journal, 2008, 46(11): 2703-2713. doi: 10.2514/1.33428 [11] KIM Y I, PARK G J, KOLONAY R M, et al. Nonlinear dynamic response structural optimization of a joined-wing using equivalent static loads[J]. Journal of Aircraft, 2009, 46(3): 821-831. doi: 10.2514/1.36762 [12] CAJA R, SCHOLZ D. Box wing flight dynamics in the stage of conceptual aircraft design[EB/OL]. [2019-10-12]. [13] ANSREWS S, PRERZ R. Comparison of box-wing and conventional aircraft mission performance using multidisciplinary analysis and optimization[J]. Aerospace Science and Technology, 2018, 79(8): 336-351. [14] SOUSA A, RIBEIRO F, PAULA A A D. Box wing longitudinal flight quality evaluation[C]//Proceedings of the AIAA Aviation Forum. Reston: AIAA, 2019: 17-21. [15] OLIVIERO F, ZANETTI D, CIPOLLA V. Flight dynamics model for preliminary design of PrandtlPlane wing configuration with sizing of the control surfaces[J]. Aerotecnica Missili & Spazi, 2016, 95(10): 201-210. [16] CUNHA B. Development of control strategies for the joined-wing aircraft[D]. Lisbon: Technical University of Lisbon, 2011: 9-26. [17] MCGHEE R, BEASLEY W. Effects of the thickness on the aerodynamic characteristics of an initial low-speed family of airfoils for general aviation applications: TM X-72843[R]. Washington, D.C. : NASA Langley Research Center, 1976. [18] YUE T, WANG L, AI J. Longitudinal linear parameter varying modeling and simulation of morphing aircraft[J]. Journal of Aircraft, 2013, 50(6): 1673-1683. doi: 10.2514/1.C031316 期刊类型引用(1)
1. 刘战合,乔良直,罗明强,王菁,田博韬. 一种连翼式双机身无人机气动特性. 空军工程大学学报(自然科学版). 2021(01): 28-32 .  百度学术
百度学术其他类型引用(3)
-

 下载:
下载:




 下载:
下载:
 百度学术
百度学术
 点击查看大图
点击查看大图
计量
- 文章访问数: 997
- HTML全文浏览量: 105
- PDF下载量: 154
- 被引次数: 4
