



Risk assessment of lateral collision between military UAV and civil aviation flight
-
摘要:
近年来无人机(UAV)已经成为新型作战力量。为解决军航UAV与民航航班之间的飞行冲突,确保飞行安全,对经典EVENT模型进行改进,提出适用于UAV的碰撞风险模型。着重研究了导航方式、人为因素、高空风对于UAV飞行的影响,并构建了相应的位置偏差模型。首先,利用蒙特卡罗法求解军航UAV与民航航班之间侧向间隔丢失的频率;其次,利用MATLAB进行算例仿真,验证模型的有效性,并得出了侧向碰撞概率随参数变化的关系;最后,通过计算不同安全间隔下的碰撞风险,对空域使用提出建议。
Abstract:In recent years, Unmanned Aerial Vehicle (UAV) has become a new combat force. In order to solve the flight conflict between military UAV and civil aviation and ensure flight safety, this paper improves the classic EVENT model and proposes a collision risk model suitable for UAV. The influence of navigation mode, human factors and high-altitude wind on UAV flight is emphatically studied, and the corresponding position deviation model is constructed. Monte Carlo method is used to calculate the loss frequency of lateral interval between military UAV and civil aviation flight. MATLAB is used for example simulation to verify the effectiveness of the model, and the relationship between the lateral collision probability and the parameters is obtained. By calculating the collision risk at different safety intervals, some suggestions on the use of airspace are put forward.
-
Key words:
- Unmanned Aerial Vehicle (UAV) /
- risk of collision /
- EVENT model /
- Monte Carlo method /
- risk assessment
-
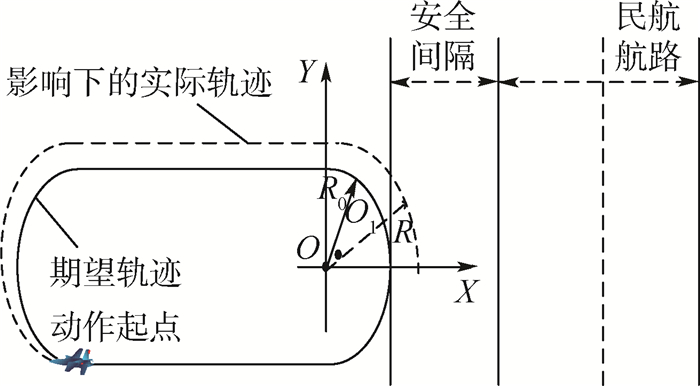
图 4 军航无人机位置偏差示意图
Figure 4. Schematic diagram of military aviation UAV position deviation
图 5 民航航班位置偏差示意图
Figure 5. Schematic diagram of civil aviation flight position deviation
图 6 军民航位置偏差示意图
Figure 6. Schematic diagram of military and civil aviation position deviation
表 1 用户等效距离误差
Table 1. User equivalent distance error
所属单元 误差源 导航系统误差/m 空间部分 卫星时钟稳定性 3.0 卫星扰动可确定性 1.0 选择可用性(SA) 32.3 其他 0.5 控制部分 星历预计误差 4.2 其他(推力性能等) 0.9 用户部分 电离层延迟 5.0 对流层延迟 1.5 接收机噪声 1.5 多路径误差 2.5 其他 0.5 系统UERE 总的误差(均方根) 33.3  下载: 导出CSV
下载: 导出CSV
表 2 侧向碰撞风险模型所需参数值
Table 2. Required parameter values of lateral collision risk model
参数 数值 参数 数值 λjx/m 22.7 E(S) 0.61 λjy/m 14.2 v/(m·s-1) 240 λjz/m 4.1 σv 15 λhx/m 72.8 σγ 2 λhy/m 79.8 σx 66.6 λhz/m 24.1 Pz(0) 0.5 β 0.034 L/km 10 Ux/(m·s-1) 129 Uy/(m·s-1) 262 Uz/(m·s-1) 5 w/(m·s-1) 0.58
下载: 导出CSV
表 3 不同起点碰撞风险表
Table 3. Collision risk with different starting points
起点 碰撞风险/(次·飞行小时-1) S1 7.36×10-11 S2 6.84×10-11 S3 5.37×10-11 S4 3.21×10-11 S5 4.43×10-10 S6 3.16×10-10 S7 2.86×10-10 S8 9.46×10-11
下载: 导出CSV
表 4 不同间隔下碰撞风险表
Table 4. Collision risk at different intervals
安全间隔/km 碰撞风险/(次·飞行小时-1) 10 7.36×10-11 9 3.42×10-11 8 4.32×10-10 7 3.47×10-9 6 6.43×10-9
下载: 导出CSV
-
[1] 呼涛. 解码中国自主研制"翼龙"无人机[J]. 科技中国, 2017, 25(2): 82-85.HU T. Decode the pterosaur UAV that independently developed by China[J]. Science and Technology of China, 2017, 25(2): 82-85(in Chinese). [2] REN L L, GUAN X M, LI X Y, et al. A large-scale flight multi-objective assignment a with cooperative coevolutionary[J]. Science China (Information Sciences), 2016, 59(7): 185-201. doi: 10.1007/s11432-015-5495-3 [3] SHEPHERD R, CASSELL R, THAPA R, et al. A reduced aircraft separation risk assessment model[C]//Guidance, Navigation, and Control Conference. Reston: AIAA, 1997: 1418-1433. [4] BROOKER P. Lateral collision risk in air traffic systems: A 'Post-Reich' event model[J]. Journal of Navigation, 2003, 56(3): 399-409. doi: 10.1017/S0373463303002455 [5] BROOKER P. Radar inaccuracies and mid-air collision risk: Part 1-a dynamic methodology, Part 2-enroute radar separation minima[J]. Journal of Navigation, 2004, 57(1): 25-51. doi: 10.1017/S0373463303002558 [6] BROOKER P. Airborne separation assurance systems: Towards a work programme to prove safety[J]. Safety Science, 2004, 42(8): 723-754. doi: 10.1016/j.ssci.2003.12.002 [7] 梁海军, 杨红雨, 肖朝, 等. 3维坐标系下的飞行冲突探测算法[J]. 四川大学学报(工程科学版), 2013, 45(2): 88-93.LIANG H J, YANG H Y, XIAO C, et al. Flight conflict detection algorithm based on the three dimensional coordinate system[J]. Journal of Sichuan University (Engineering Science Edition), 2013, 45(2): 88-93(in Chinese). [8] 石磊, 吴仁彪, 黄晓晓. 基于总体冲突概率和三维布朗运动的冲突探测算法[J]. 电子与信息学报, 2015, 37(2): 360-366.SHI L, WU R B, HUANG X X. Conflict detection algorithm based on overall conflict probability and three dimensional brownian motion[J]. Journal of Electronics & Information Technology, 2015, 37(2): 360-366(in Chinese). [9] 王松涛, 吕宗平, 张兆宁. 基于环境要素的自由飞行条件下航空器碰撞风险模型[J]. 中国科技论文, 2016, 11(19): 2183-2186. doi: 10.3969/j.issn.2095-2783.2016.19.007WANG S T, LV Z P, ZHANG Z N. Study of the collision risk model involving flight environment conditions under free flight[J]. China Science Paper, 2016, 11(19): 2183-2186(in Chinese). doi: 10.3969/j.issn.2095-2783.2016.19.007 [10] 党淑雯, 王康乐. 飞机平行航路侧向碰撞风险预测仿真[J]. 计算机应用, 2017, 37(2): 115-117.DANG S W, WANG K L. Prediction and simulation of aircraft lateral collision risk on parallel route[J]. Journal of Computer Applications, 2017, 37(2): 115-117(in Chinese). [11] 程擎, 朱代武. 新一代空中交通管理系统[M]. 成都: 西南交通大学出版社, 2013: 107-111.CHENG Q, ZHU D W. New generation ATM system[M]. Chengdu: Southwest Jiaotong University Press, 2013: 107-111(in Chinese). [12] 王紫军. 小型多光谱相机无人机云台系统研究[D]. 陕西: 西北农林科技大学, 2017: 8-15.WANG Z J. Research on UAV gimbal system of small-sized multispectral camera[D]. Shaanxi: Northwest A&F University, 2017: 8-15(in Chinese). [13] 张微. 基于人因可靠性的平行航路碰撞风险模型研究[D]. 天津: 中国民航大学, 2013.ZHANG W. Research on collision risk of parallel routes model based on human reliability[D]. Tianjin: Civil Aviation Flight University of China, 2013(in Chinese). [14] 史校川, 金镭, 王春生, 等. 美国军民用无人机系统事故案例分析[J]. 航空标准化与质量, 2017(3): 46-49.SHI X C, JIN L, WANG C S, et al. A case study of the United States military and civilian UAV system accident[J]. Aviation Standardization and Quality, 2017(3): 46-49(in Chinese). [15] 曹兴武, 张兆宁. 基于Event改进模型的交叉航路碰撞风险评估[J]. 中国民航大学学报, 2015, 33(3): 1-4. doi: 10.3969/j.issn.1674-5590.2015.03.001CAO X W, ZHANG Z N. Risk assessment of cross-way collision based on EVENT model[J]. Civil Aviation Flight University of China, 2015, 33(3): 1-4(in Chinese). doi: 10.3969/j.issn.1674-5590.2015.03.001 [16] 张晓燕, 朱代武, 杨昌其. 成都-拉萨所需导航性能(RNP4)平行航路安全性评估研究[J]. 科学技术与工程, 2014, 14(29): 307-310.ZHANG X Y, ZHU D W, YANG C Q. Safety assessment of RNP4 Chengdu-Lasa parallel routes[J]. Science Technology and Engineering, 2014, 14(29): 307-310(in Chinese). [17] 杨敏. 无人机与民航客机碰撞安全风险评估[D]. 天津: 中国民航大学, 2019: 19-31.YANG M. Safety risk assessment of collision between UAV and civil aircraft[D]. Tianjin: Civil Aviation Flight University of China, 2019: 19-31(in Chinese). -

 下载:
下载:



 点击查看大图
点击查看大图

计量
- 文章访问数: 1057
- HTML全文浏览量: 199
- PDF下载量: 231
- 被引次数: 0
