



Autonomous capability evaluation of ground-attack UAV based on improved Hopfield neural network
-
摘要:
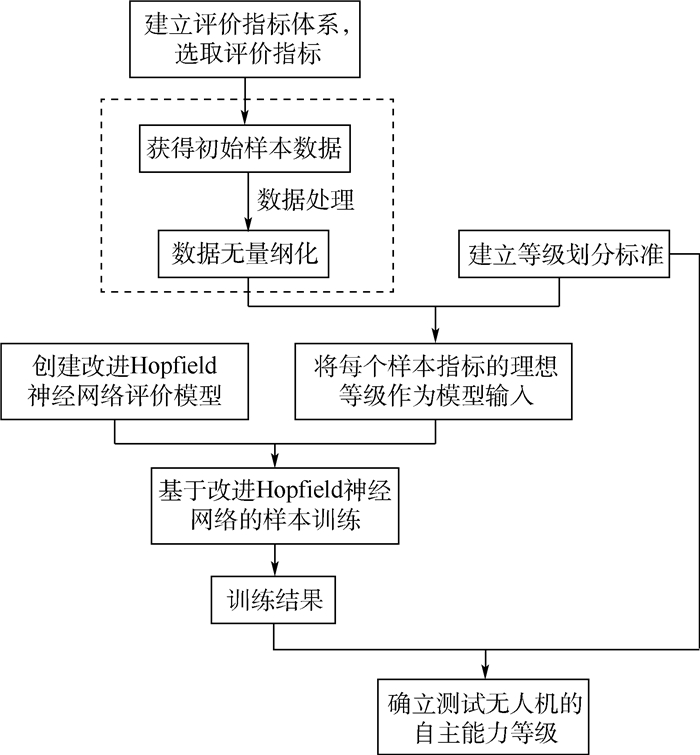
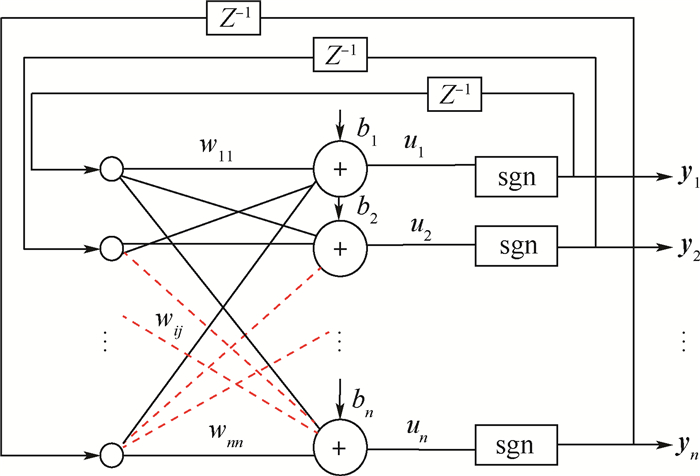
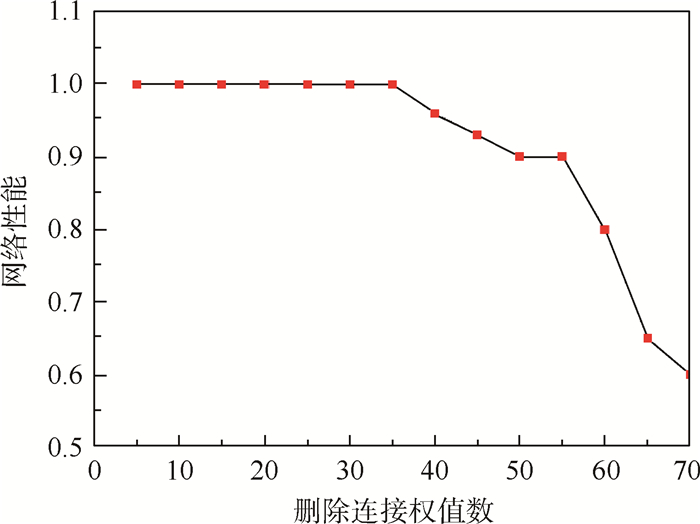
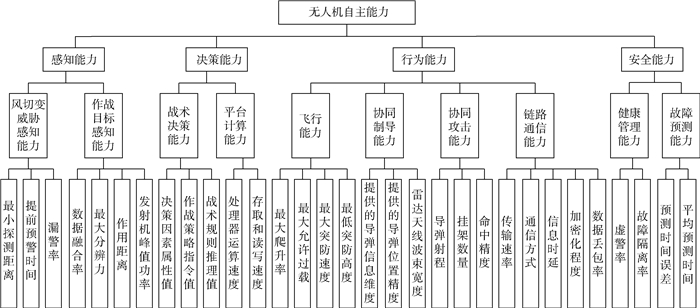
对地攻击型无人机是当前最先进的无人装备之一,无人机必须具备很高的自主能力,自主能力成为无人机的典型作战能力。针对对地攻击型无人机的自主能力量化评价问题,从感知能力、决策能力、行为能力和安全能力4个方面,并侧重机载装备参数分析,提出了一套完整的自主能力评价指标体系。结合模型因素库,运用奇异值分解设计Hopfield神经网络权值矩阵,利用基于稀疏度的权值删减算法改进网络结构。构建自主能力评价标准,对对地攻击型无人机系统自主能力进行量化分级。仿真结果表明:相对于传统Hopfield神经网络,改进算法能够在一定范围内删除非关键的连接权值,降低网络复杂度,工程上更容易实现对地攻击型无人机系统自主能力的量化评价。
-
关键词:
- 对地攻击型无人机 /
- 自主能力 /
- 指标体系 /
- 改进Hopfield神经网络 /
- 综合评价
Abstract:The ground-attack UAV has been one of the most state-of-the-art unmanned equipments, which requires a high degree of autonomous capability. Autonomous capabilityis a typical operational ability of UAV. In view of the quantitative evaluation of autonomous capability forground-attack UAV, this paper proposes a detailed evaluation index system of autonomous capability from four aspects of observation capability, decision capability, action capability and security capability, and places emphasis on the analysis of airborne equipment parameters. Combined with the model factor library, the weight matrix of Hopfield neural network is designed by singular value decomposition, and based on sparsity, the weight reduction algorithm is introduced to improve the network structure. Finally, the evaluation criterion of autonomy is established to quantify and grade the autonomous capability for ground-attack UAV system. The simulation results show that, compared with traditional Hopfield neural network, the improved algorithm can delete the unimportant connection weights within a certain range, reduce the network complexity, and easily achieve quantitative evaluation of the autonomous capability of UAV system.
-

图 1 对地攻击型无人机自主能力评价指标体系
Figure 1. Evaluation index system for autonomous capabilities of ground-attack UAV
表 1 感知能力
Table 1. Observation capability
指标等级 风切变威胁感知能力(风切变预警系统) 作战目标感知能力(SAR) 最小探测距离/km 提前预警时间/s 漏警率/% 数据融合率/% 最大分辨力/(m×m) 作用距离/km 发射机峰值功率/W Ⅴ 6.5 60 1 100 8×8 80 960 Ⅳ 5.6 50 3 80 6×6 64 750 Ⅲ 4.5 35 6 60 4×4 50 600 Ⅱ 3 25 8 45 3×3 26 320 Ⅰ 1.2 15 10 25 2×2 18 180  下载: 导出CSV
下载: 导出CSV
表 2 决策能力
Table 2. Decision capability
指标等级 战术决策能力(自主决策专家系统) 平台计算能力(主处理运算单元) 决策因素属性值 作战策略指令值 战术规则推理值 处理器运算速度/MIPS 存取和读写速度/(GB·s-1) Ⅴ 50 29 23 600 25 Ⅳ 45 22 18 200 18 Ⅲ 39 18 14 50 10 Ⅱ 32 12 11 30 3.2 Ⅰ 25 8 9 20 1.6 注:MIPS(Million Instructions Per Second)指单字长定点指令平均执行速度。
下载: 导出CSV
表 3 行为能力Ⅰ
Table 3. Action capability (Ⅰ)
指标等级 飞行能力(飞行数据记录器) 协同制导能力(空地导弹与制导雷达) 最大爬升率/
(m·s-1)最大允许过载/g 最大突防速度/(km·h-1) 最低突防高度/m 提供的导弹信息维度 提供的导弹位置精度/% 雷达天线波束宽度/(°) Ⅴ 350 9 1 480 200 12 95 2 Ⅳ 310 7.5 1 390 540 10 92 1.5 Ⅲ 246 5.4 1 080 720 8 88 0.92 Ⅱ 148 4 900 900 6 84 0.57 Ⅰ 85 3.2 720 1 000 3 80 0.32
下载: 导出CSV
表 4 行为能力Ⅱ
Table 4. Action capability (Ⅱ)
指标等级 协同攻击能力(航空火力控制系统) 链路通信能力(数据总线通信系统) 导弹射程/km 挂架数量 命中精度/% 传输速率/(Mbit·s-1) 通信方式 信息时延/ms 加密化程度 数据丢包率/% Ⅴ 3 000 16 98 3 8 5 1 0.2 Ⅳ 2 500 14 95 2 6 18 0.8 2.2 Ⅲ 1 000 10 92 1.5 5 30 0.6 5 Ⅱ 750 8 90 1 2 50 0.3 8.3 Ⅰ 120 4 85 0.5 1 100 0.1 10
下载: 导出CSV
表 5 安全能力
Table 5. Security capability
指标等级 健康管理能力(中央维修监测系统) 故障预测能力(中央维修监测系统) 虚警率/% 故障隔离率/% 预测时间误差/s 平均预测时间/s Ⅴ 0.5 100 0.5 10 Ⅳ 2 97 1.1 30 Ⅲ 3.5 93.9 2.5 52 Ⅱ 5 87.1 3.9 86 Ⅰ 8 85 5 100
下载: 导出CSV
表 6 自主能力等级划分标准
Table 6. Criteria for level of autonomous capabilities
能力级别 感知能力 决策能力 行为能力 安全能力 5集群合作 集群互助感知 集群互助决策 集群协助攻击 预测故障并隔离 4多机协作 复杂环境自主追踪 长机分配战术规划 多机协助攻击 预测故障发生 3单机实时规划任务 机外数据辅助感知 机外重新规划上传 及时规避部分威胁 补偿大多数故障 2单机复杂计划任务 天气威胁感知 数据库调整决策 单机攻击并毁伤评估 实时健康诊断 1单机简单计划任务 针对性感知地面目标 执行预编程的决策 单机对地攻击 状态报告
下载: 导出CSV
-
[1] 刘树光, 茹乐, 王柯. 无人机自主性评价方法新进展[J]. 飞航导弹, 2019(2): 43-49. https://www.cnki.com.cn/Article/CJFDTOTAL-FHDD201902009.htmLIU S G, RU L, WANG K.New progress in autonomous evaluation methods of UAV[J]. Aerodynamic Missile Journal, 2019(2): 43-49(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-FHDD201902009.htm [2] 王新星. 无人平台自主能力分级模型研究[D]. 沈阳: 沈阳航空航天大学, 2012.WANG X X.Study on model for autonomy level of unmanned platforms[D].Shenyang: Shenyang Aerospace University, 2012(in Chinese). [3] 张毅. 高空长航时无人机总体方案评价准则方法研究[D]. 西安: 西北工业大学, 2006.ZHANG Y.Study on evaluation criterion method of overall program of high altitude long endurance UAV[D].Xi'an: Northwestern Polytechnical University, 2006(in Chinese). [4] 史辉, 刘向前. 地面无人平台在典型战场环境中的自主机动性能评价研究[J]. 兵工学报, 2014, 35(S1): 17-24. https://www.cnki.com.cn/Article/CJFDTOTAL-BIGO2014S1004.htmSHI H, LIU X Q.Assessment method for autonomous mobility of UGV in a typical battle field environment[J]. Acta Armamentarii, 2014, 35(S1): 17-24(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-BIGO2014S1004.htm [5] SUN Y, TAO G, XIONG G, et al. The FUZZY-AHP evaluation method for unmanned ground vehicle[J]. Applied Mathematics & Information Sciences, 2013, 7(2): 653-658. http://www.researchgate.net/publication/270681496_The_FUZZY-AHP_evaluation_method_for_unmanned_ground_vehicles [6] LI D, LIU T, CAO T, et al.The risk assessment for unmanned vehicle using Bayesian network[C]//International Conference on Geoinformatics in Resource Management & Sustainable Ecosystems.Berlin: Springer, 2016: 200-207. [7] 蔡金煌, 王晓薇, 叶博. 远程支援干扰下搜索雷达探测效能评估[J]. 科学技术与工程, 2012, 12(21): 5163-5167. doi: 10.3969/j.issn.1671-1815.2012.21.007CAI J H, WANG X W, YE B.Evaluation of detection effectiveness of search radar under remote support jamming[J]. Science Technology and Engineering, 2012, 12(21): 5163-5167(in Chinese). doi: 10.3969/j.issn.1671-1815.2012.21.007 [8] 刘胜, 刘娜, 杨育, 等. 危险源安全评价的离散Hopfield神经网络[J]. 重庆大学学报, 2013, 36(4): 26-32. https://www.cnki.com.cn/Article/CJFDTOTAL-FIVE201304005.htmLIU S, LIU N, YANG Y, et al. Safety evaluation of hazards based on discrete Hopfield neural network[J]. Journal of Chongqing University, 2013, 36(4): 26-32(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-FIVE201304005.htm [9] CLOUGH B T.Metrics, schmetrics!How do you track a UAV's autonomy : AIAA-2002-3499[R].Reston: AIAA, 2002. [10] 董卓宁, 张汝麟, 陈宗基. 无人机在恶劣气象条件下的自主决策技术[J]. 航空学报, 2008, 29(S1): 107-113. https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB2008S1017.htmDONG Z N, ZHANG R L, CHEN Z J.Autonomous decision-making technique of UAVs under hazardous weather condition[J]. Acta Aeronautica et Astronautica Sinica, 2008, 29(S1): 107-113(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB2008S1017.htm [11] 胡朝江, 李晓冲, 袁有志. 大飞机风切变探测告警系统[J]. 中国民航大学学报, 2008, 26(5): 23-25. doi: 10.3969/j.issn.1001-5590.2008.05.006HU C J, LI X C, YUAN Y Z.Airborne wind shear detection and warning system on large transport[J]. Journal of Civil Aviation University of China, 2008, 26(5): 23-25(in Chinese). doi: 10.3969/j.issn.1001-5590.2008.05.006 [12] 曲长文, 何友, 龚沈光. 机载SAR发展概况[J]. 现代雷达, 2002(1): 3-12. https://www.cnki.com.cn/Article/CJFDTOTAL-XDLD200201000.htmQU C W, HE Y, GONG S G.A survey of airborne SAR development[J]. Modern Radar, 2002(1): 3-12(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XDLD200201000.htm [13] 王洁. 多传感器数据融合及其综合性能评估[D]. 南京: 南京理工大学, 2008.WANG J.Multi-sensor data fusion and comprehensive performance[D].Nanjing: Nanjing University of Science and Technology, 2008(in Chinese). [14] 张磊. 无人作战飞机自主决策技术研究[J]. 航空科学技术, 2014, 25(5): 49-53. doi: 10.3969/j.issn.1007-5453.2014.05.011ZHANG L.Research on autonomous decisionmaking technology of UCAV[J]. Aeronautical Science & Technology, 2014, 25(5): 49-53(in Chinese). doi: 10.3969/j.issn.1007-5453.2014.05.011 [15] 王亮, 李仁府, 孙悦. 飞翼无人机气动布局及飞行性能计算分析[J]. 中国设备工程, 2017(3): 153-154. doi: 10.3969/j.issn.1671-0711.2017.03.079WANG L, LI R F, SUN Y.Aerodynamic layout and flight performance analysis of flying wing UAV[J]. China Plant Engineering, 2017(3): 153-154(in Chinese). doi: 10.3969/j.issn.1671-0711.2017.03.079 [16] 屈高敏. 对地攻击型无人机作战效能评估与软件开发[D]. 南昌: 南昌航空大学, 2015.QU G M.The research of UCAV effectiveness assessment and software development[D].Nanchang: Nanchang Hangkong University, 2015(in Chinese). [17] 刁兴华, 方洋旺, 张磊, 等. 中远程空空导弹多机协同中制导交接方法[J]. 国防科技大学学报, 2014, 36(3): 77-82. https://www.cnki.com.cn/Article/CJFDTOTAL-GFKJ201403015.htmDIAO X H, FANG Y W, ZHANG L, et al. Method of guidance handover in midcourse guidance phase of air-to-air missile about cooperative multi-platform[J]. Journal of National University of Defense Technology, 2014, 36(3): 77-82(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-GFKJ201403015.htm [18] 刘亭, 姜忠龙. 舰载作战系统信息传输能力评价指标研究[J]. 舰船电子工程, 2015, 35(6): 30-32. https://www.cnki.com.cn/Article/CJFDTOTAL-JCGC201506009.htmLIU T, JIANG Z L.A study of the evaluation index system on the information transmitting ability of the shipboard combat system[J]. Ship Electronic Engineering, 2015, 35(6): 30-32(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JCGC201506009.htm [19] 张耀鸿, 叶培春. 面向任务的作战数据保障能力评估方法与工具[J]. 火力与指挥控制, 2012, 37(3): 136-138. doi: 10.3969/j.issn.1002-0640.2012.03.035ZHANG Y H, YE P C.Tool and method of task-oriented operational data guarantee capability evaluation[J]. Fire Control & Command Control, 2012, 37(3): 136-138(in Chinese). doi: 10.3969/j.issn.1002-0640.2012.03.035 [20] 崔嘉, 贺静, 刘奇, 等. 无人机PHM系统体系结构设计研究[J]. 计算机测量与控制, 2016, 24(6): 133-135. https://www.cnki.com.cn/Article/CJFDTOTAL-JZCK201606037.htmCUI J, HE J, LIU Q, et al. Research on the architecture design of UAV PHM system[J]. Computer Measurement & Control, 2016, 24(6): 133-135(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JZCK201606037.htm [21] 李璠, 蒋觉义. PHM系统验证指标研究[J]. 航空标准化与质量, 2013(2): 36-40. https://www.cnki.com.cn/Article/CJFDTOTAL-HKBZ201302012.htmLI P, JIANG J Y.Research on verification index of PHM system[J]. Aeronautic Standardization & Quality, 2013(2): 36-40(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HKBZ201302012.htm [22] 郑鹏升. Hopfield神经网络动力学分析与应用[D]. 天津: 天津大学, 2010.ZHENG P S.Dynamic analysis of Hopfield neural networks and applications[D].Tianjin: Tianjin University, 2010(in Chinese). [23] CLOUGH B T.Metrics, schmetrics!How the heck do you determine a UAV's autonomy anyway[J]. Security, 2002, 990: 313-319. http://www.researchgate.net/publication/228774468_Metrics_schmetrics_How_the_heck_do_you_determine_a_UAV's_autonomy_anyway [24] OSHIMA H O, DAGAKI T.Storage capacity and retrieval time of small-world neural networks[J]. Physical Review E, 2007, 76(2): 036114. http://www.ncbi.nlm.nih.gov/pubmed/17930313 -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 735
- HTML全文浏览量: 249
- PDF下载量: 75
- 被引次数: 0
